
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
101 - 120 / 1,245
レーダ装置、データ処理方法、及びデータ処理プログラム
【課題】短い観測時間でマルチパス環境下において高度を推定する、レーダ装置、レーダ制御方法、及びレーダ制御プログラムを提供する。
【解決手段】空間に送信信号を送信し、前記空間内の目標物から反射された受信信号を受信する送受信部と、前記受信信号に基づき前記目標物の高度情報を計測する位置計測部と、を備えるセンサ部を複数個備え、分散算出部は、前記複数個の全部又は一部のセンサ部を含む組み合わせ毎に、前記計測された高度情報の分散を算出し、データ選択部は、前記算出した分散が最小となるセンサ部の組み合わせを選択し、選択した組み合わせに含まれるセンサ部が計測した高度情報に基づき前記目標物の高度情報を決定することを特徴とする。
(もっと読む)
目標追跡システム及び目標追跡方法

【課題】 多重仮説追尾にパーティクルフィルタを適用する場合でも、演算量を抑制しながら、高精度に目標が追跡できるようにする。
【解決手段】 目標からの信号波に基づき当該目標を検出して検出目標位置として出力する検出器12と、少なくとも外乱や測定誤差に起因する揺らぎを生成して出力する揺らぎ生成分配器16と、前記検出目標位置に基づき目標の真の位置を推定し、その際に前記揺らぎに基づき仮想粒子を設定して、当該仮想粒子を用いて前記真の目標位置を推定する予測推定器20と、を備えることを特徴とする目標追跡システム。
(もっと読む)
管制装置、航空機、及び管制方法
【課題】目標に対する射撃を行うための火器管制を効率良く行うことを目的とする。
【解決手段】航空機10は、データリンク装置24によって、僚機10Bから僚機10Bの移動情報及び僚機10Bが捜索追尾によって取得した目標情報を受信し、自機の移動情報及び自機が捜索追尾によって取得した目標情報を僚機10Bへ送信する。そして、航空機10は、目標割当部54によって、データリンク装置24で受信した僚機10Bの移動情報及び目標情報、並びに自機の移動情報及び自機の捜索追尾によって取得した目標情報に基づいて、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当てる割当処理を行い、割当結果である目標割当指示を僚機10Bへデータリンク装置24によって送信する。
(もっと読む)
気象情報提供システム及び気象情報提供方法
【課題】ドップラエコーがない領域に存在する目標の風向風速情報を取得することができ、目標の離発着時のより品質の高い気象情報に特化した観測を行うことも可能であり、得られた風向風速情報を有効に伝えることができるようにする。
【解決手段】空港観測用に特化した、ブラッグ散乱エコー対応の気象レーダ13を用い、ASR/SSR11で検出される航空機の位置・高度情報に対応する降雨及び風向風速情報を取得し、さらに気象予測モデル処理装置14から位置・高度情報に対応する気象予測情報を取得して、それぞれターゲットレポート情報に付加し、当該レポート情報を管制官、パイロットへ適切に送信する。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、全方位に亘って同一PRIを使用しているため、見通し外となる範囲を含む方位に対しても同一PRIを使用し、時間的リソースを有効に使用できていない。
【解決手段】 この発明のレーダ装置は、自己位置を検出する自己位置検出部と、前記自己位置検出部で検出した自己位置周辺の地形データを記憶する地形データベースと、前記地形データを用い前記自己位置を中心とした方位毎の見通し距離を算出し、当該見通し距離に基き方位毎のPRI(Pulse Repetition Interval)を算出する算出部と、前記方位毎のPRIに基いて、各方位に向けて前記方位に関連付けされたPRIの電波を放射する送信制御部とを備えるようにした。
(もっと読む)
受信装置
【課題】マルチパス環境においても良好な受信性能が得られる受信装置を得ること。
【解決手段】本発明は、航空機に搭載されたトランスポンダより送信されたモードS信号を受信する受信装置であって、受信データをオーバサンプルし、連続または非連続な複数のビット区間における全サンプル結果について、受信電力に基づき量子化を行い、量子化後の各サンプル結果のパターンを、予め用意しておいた、取りうるサンプルパターンにそれぞれに対応するビット判定値が示されたテーブルと比較してビット判定を行う。
(もっと読む)
車載用頭部位置検出装置、車載用表示装置及び運転支援装置
【課題】頭部の位置を正確に検出できる車載用頭部位置検出装置、車載用表示装置及び運転支援装置を提供する。
【解決手段】実施形態によれば、複数の送受信器と送受信制御部とを備えた車載用頭部位置検出装置が提供される。複数の送受信器は、車両に搭乗する搭乗者の頭部に対向する互いに異なる位置に設けられる。複数の送受信器は、頭部に向けて音波及び電磁波の少なくともいずれかの波を送信し、反射波を受信する。送受信制御部は、複数の送受信器に接続される。送受信制御部は、複数の送受信器のいずれかに、送信波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その結果に基づいて頭部に最も近い送受信器を検出する。送受信制御部は、頭部に最も近い送受信器に頭部検出波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その受信結果に基づいて頭部の位置を検出する。
(もっと読む)
電波計測システム
【課題】屋内エリアの地図データを作成し、作成した地図データに基づいて管理者により指定された経路を自律的に移動しながら電波環境データを測定する。
【解決手段】周囲の壁面までの距離を方位毎に測距する測距センサ207と、屋内エリア内に設置されたアクセスポイントからの電波の受信電力を予め定めた一定の時間間隔で測定する受信電力測定部203と、受信電力測定部203で測定された受信電力データの大きさを判定する受信電力判定部215と、測距センサ207により測距された測距データから屋内エリアの地図データを作成する地図データ作成部217と、サーバから与えられる走行データにより指定される走行経路に沿って自律的に自ロボットを走行させる走行手段208、209と、受信電力判定部215の判定結果に基づいて走行手段を構成するモータ209の回転速度を制御して自ロボットの移動速度を制御するモータ回転制御部216とを備える。
(もっと読む)
レーダ受信機及びレーダ装置
【課題】簡単な構成で、広いダイナミックレンジを有するレーダ受信機を提供する。
【解決手段】レーダ受信機11は、信号分岐部20と、周波数変換部29と、IF信号対数増幅・検波部25と、RF信号対数増幅・検波部27と、加算部28と、を備える。信号分岐部20は、レーダアンテナ10により受信された高周波信号RF0を、第1ライン31と、第1ライン31よりも信号レベルを減衰させた信号が流れる第2ライン32と、に分岐させる。周波数変換部29は、第1ライン31を流れる第1高周波信号RF1を、中間周波数信号IFに変換する。IF信号対数増幅・検波部25は、中間周波数信号IFを検波して第1検波信号DS1を出力する。RF信号対数増幅・検波部27は、第2ライン32を流れる第2高周波信号RF2を検波して第2検波信号DS2を出力する。加算部は、第1検波信号と第2検波信号を合成して合成出力信号DS3として出力する。
(もっと読む)
レーダ装置
【課題】互いに隣り合う素子アンテナで受信した信号の位相差を用いてターゲット方位の計測を行なう場合、角度アンビギュイティが発生し、レーダ装置としての有効な測角範囲を狭めてしまう。
【解決手段】複数の素子アンテナにより1つの受信チャンネルを構成する場合、互いに隣り合わない位置関係に配置された複数の素子アンテナRX1−1、RX1−2を同一の受信チャンネルとして組み合わせて信号合成することにより、角度アンビギュイティが発生し始める角度をレーダの視野角よりも可能な限り広角へと追いやり、レーダとして有効な測角範囲を最大限確保することができる。しかも複数の素子アンテナは不等間隔で配置されている。
(もっと読む)
ドップラーセンサ及び該ドップラーセンサを用いた照明器具
【課題】 誤検出が抑えられるドップラーセンサ及び該ドップラーセンサを用いた照明器具を提供する。
【解決手段】 ドップラー信号のスペクトルから所定の背景スペクトルを減じた差分スペクトルにおいて、強度が最も高い第1ピーク周波数を用いたスペクトル分析が行われる。すなわち、図1(b)のように第1ピーク周波数の次に強度が高い第2ピーク周波数と第1ピーク周波数との一方が他方の整数倍となった場合、周期的なノイズによる誤検出であって人体は存在しないと判定される。また、図1(c)のように強度の積分の値が第1ピーク周波数の低周波側において高周波側よりも低くなった場合、移動物体は雨滴であって人体は存在しないと判定される。そして、上記のいずれにも該当しない図1(a)のような場合にのみ、人体が存在すると判定される。上記動作により、周期的なノイズや雨滴による誤検出が抑えられる。
(もっと読む)
精測進入レーダ、精測進入レーダ制御方法およびその制御用プログラム
【課題】着陸誘導対象機の検出を安定して実施する。
【解決手段】ASR40から取得した追尾目標データDおよびSSR50から取得した追尾目標データEに基づいて進入機情報をレーダ表示手段30に表示し、オペレータによって誘導対象機が選択されると選択された航空機の進入機情報に基づいて目標物検出手段10で検出する対象機のドップラ周波数の予測値および予測位置を追尾管理制御部21が算出し、算出したドップラ周波数が中心周波数となるようなフィルタ係数をフィルタ係数制御部14が算出し、フィルタ係数制御部14が算出したフィルタ係数を目標物検出フィルタ11に設定する。追尾管理制御部21は、電波の送信方向が予測位置に向くように設定された電子走査式アンテナ1を介して電波を出力すると共に電波の反射を受信する。受信した反射波から目標物検出フィルタ11で航空機の反射信号である目標物信号を抽出する。
(もっと読む)
レーダ装置
【課題】並走して走行する対向車を正確に検出することができないという問題が生じていた。
【解決手段】本発明のレーダ装置は、物標に対して電波を送信する送信アンテナ(14)と、物標からの反射波を受信する受信アンテナ(15)と、反射波に基づいて、自車両と同じ進行方向に向かって移動する先行車及び先行物標の位置を検出し、先行物標の位置が、先行車の位置を基準とした所定の先行車判定範囲内にある場合は、先行物標は先行車と同一と判定する先行車検出部(35)と、反射波に基づいて、自車両の進行方向と反対の方向に向かって移動する対向車及び対向物標の位置を検出し、対向物標の位置が、対向車の位置を基準とした所定の対向車判定範囲内にある場合には、対向物標は対向車と同一と判定する対向車検出部(36)と、を有し、対向車判定範囲は、先行車判定範囲よりも狭くなるように設定されることを特徴とするレーダ装置。
(もっと読む)
センサ統合システム及びセンサ統合方法
【課題】複数種類のセンサによる観測データを組み合わせて、目標物の高精度な移動軌跡を抽出する。
【解決手段】プロセッサと、前記プロセッサに接続される記憶装置と、前記プロセッサに接続される出力装置と、を備えるセンサ統合システムであって、前記記憶装置は、複数のセンサによって観測された観測データを保持し、前記観測データはあらかじめ規定された項目のうち選択的に記述された項目を含み、前記プロセッサは複数の前記観測データの選択記述された前記項目を組み合わせ、一つ以上の目標物の移動軌跡を推定し、前記出力装置は、前記移動軌跡を示す情報を出力する。
(もっと読む)
追尾処理装置
【課題】目標に関する状況判断に資する情報が提供される追尾処理装置を提供する。
【解決手段】相関処理部は、監視区域に存在する目標の位置と、追尾中目標の登録予測位置と、登録判定結果に応じて異なる閾値とに基づいて、目標と追尾中目標とが同一かどうか判定する相関処理を実行する。予測処理部は、位置及び登録予測位置に基づいて目標の次回の予測位置を算出する。予測判定部は、位置、目標の種類に対応する斜面移動能力、及び監視区域の地勢情報に基づいて目標が次回に到達し得る目標存在範囲を算出し、予測位置及び目標存在範囲に基づいて目標が予測位置に到達可能かどうかの予測判定を実行し、予測判定の結果で登録判定結果を更新する。目標存在範囲提示部は、目標存在範囲を地図上の領域として提示する。予測変更部は、予測判定の結果が「到達可能」の場合に予測位置で登録予測位置を更新する。
(もっと読む)
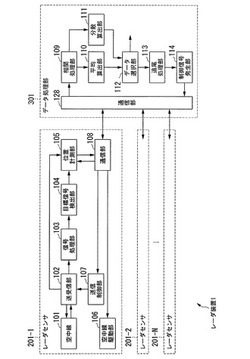
目標検出装置およびシステム
【課題】屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供し、監視領域内に侵入した複数の目標を高精度かつ高速に検出する。
【解決手段】センサ手段102−1〜102−mと送受信手段101の間の接続を、スイッチ手段103により時分割で切り替えることで、送受信手段101の部品点数を抑えた構成で広い測角範囲がカバーされる。また、2台の目標検出装置のみを用いて目標の定位を行う場合、2台の装置のそれぞれがカバーする角度範囲の両方に共通する領域の情報や、一方の装置から各目標を経由して他方の装置に至る総合伝搬距離情報を用いて、円の方程式の組み合わせの曖昧さに起因する誤検出を防止する。
(もっと読む)
目標物検出装置及びプログラム
【課題】自車の周囲に複数の目標物が存在している場合でも、各目標物と自車との位置関係を容易に認識することができる目標物検出装置を提供する。
【解決手段】自車の位置を検出するGPS受信機8と、目標物の位置情報を記憶するデータベース19と、GPS受信機で検出された位置情報と、データベースに格納された目標物の位置情報とに基づき、表示対象の目標物を抽出する制御部18と、その制御部により抽出された目標物の位置情報と、自車位置情報とを表示する表示部5と、を備える。表示部には、複数の目標物の位置と車両の現在位置とが、2次平面上に配置されるターゲットアイコンにより報知するように構成した。
(もっと読む)
レーダ装置及びレーダ装置の信号処理方法
【課題】簡単な装置構成で、ウェザークラッタの影響を受ける領域における目標の検出率を向上させ、安定した目標追尾が行えるレーダ装置及びその信号処理方法を提供する。
【解決手段】信号処理器2は、検出処理手段21、追尾処理手段22、及びウェザー判定処理手段23から構成されている。ウェザー判定処理手段23は、ウェザークラッタの影響を受ける領域(ウェザークラッタ情報)を算出し、ウェザークラッタ情報を取得した検出処理手段21は、ウェザークラッタの影響を受ける領域に対して、通常の検出判定用スレッショルドよりも低く設定されたウェザークラッタ領域検出判定用スレッショルドを適用するようにした。これにより、簡単な装置構成で、ウェザークラッタの影響を受ける領域における目標の検出率が向上し、安定した目標追尾を行うことが可能なレーダ装置が得られる。
(もっと読む)
クラッタ除去器、レーダ装置、クラッタ除去方法およびクラッタ除去用プログラム
【課題】物標とクラッタ源との相対速度差が小さいときにも十分にクラッタを抑圧することである。
【解決手段】ドップラシフト周波数推定部331aは、反射体からの複素受信信号I,Qに基づいて反射体のドップラシフト周波数を推定して、推定した値をドップラ推定値ωとする。擬似スペクトル生成部331bは、ドップラ推定値ωに対応する信号強度を複素受信信号I,Qに基づいて与えることにより、擬似スペクトルUを生成する。CFAR処理部332は、クラッタの抑圧処理を、擬似スペクトルUを用いて行なう。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】目標の誤追尾を防止して、追尾精度を高めることができるようにする。
【解決手段】センサ1により特定されたプロットに対する類別処理を実施するプロット類別処理部2と、プロット類別処理部2から出力されたプロットの類別結果等を参照して、そのプロットの重心位置を追尾航跡の更新処理に使用するか否かを判定するプロット使用判定処理部3とを設け、追尾処理部4が、プロット使用判定処理部3によりプロットの重心位置を追尾航跡の更新処理に使用する旨の判定が行われた場合、そのプロットの重心位置を用いて追尾航跡を更新し、使用しない旨の判定が行われた場合、そのプロットの重心位置を用いずに追尾航跡を更新する。
(もっと読む)
101 - 120 / 1,245
[ Back to top ]