
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
2,001 - 2,020 / 2,290
受波装置及び測距装置
【課題】広い範囲で波を受けることができる受波装置の提供
【解決手段】受波装置は、受光素子3と、受光素子3に向けて反射光12、13を集約させるレンズ2とを備えており、レンズ2は焦点距離が異なった部分を少なくとも3つ以上備えている。レンズ2は焦点距離が異なった部分を少なくとも3つ以上備えており、広い範囲で受光素子3に安定した光量を入射させることができる。
(もっと読む)
車両用物体認識装置

【課題】路上にある道路標識等の看板を確実に識別して先行車両等の車線上の物体との距離測定が看板に影響されずに正しく行うことのできる車両用物体認識装置を提供する。
【解決手段】車両用物体認識装置は、前方を走行する先行車両や障害物等の物体との間の距離L1や方位を測定する相対位置測定装置7と、前方の画像を撮像して画像認識を行い、撮像画像に基づいて距離L2を測定する撮像装置5とを備える。
先行車両6が看板3の下方を通過する際に検知ビーム2を看板3を照射しない検知ビーム2′まで下げることにより、先行車両6までの測定距離に誤差が生じないようにする。
(もっと読む)
レーダ装置
【課題】 相対速度に依存せずに安定して距離計測を行う。
【解決手段】 目標物に対する相対速度及び距離を計測するレーダ装置であって、前記相対速度が大きい場合に適した方法で相対速度及び距離を計測する第1の計測手段と、前記相対速度が小さい場合に適した方法で相対速度及び距離を計測する第2の計測手段と、前記第1の計測手段と第2の計測手段とを相対速度の大きさに基づいて切り替える制御手段とを備え、該制御手段は、所定の閾値と相対速度とを比較し、相対速度が閾値より大きければ前記第1の計測手段を選択し、相対速度が閾値以下であれば第2の計測手段を選択する、という手段を採用する。
(もっと読む)
複数の物体の距離及び相対速度の測定のための方法及び装置
時間的に線形の周波数ランプをもつ送信信号を発射し、物体で反射した受信信号を受信して送信信号と混合することによる、FMCWレーダを用いた複数の物体の距離及び相対速度の測定のための方法及び装置。各物体についての各周波数ランプのミキサ出力周波数に対して、距離値と相対速度値との組合せが割り当てられ、距離と相対速度との複数の組合せの交点から、考えられる物体の距離及び相対速度が決定され、その際、考えられる物体は、アンビギュイティのための見せかけの物体、又は現実の物体でありうる。アンビギュイティによる見せかけの物体は、その次の測定サイクルにおいて少なくとも1つの周波数ランプの周波数勾配をランダムに変化させることによって、消去される。 (もっと読む)
電子走査レーダのビーム制御装置
【課題】 従来の複数のPAAを装備し各PAAで同時ビーム照射する同期型PARによる複数目標に対する追尾の同時ビーム照射方法は、目標の距離に応じて求めたPRIの長短を基に複数の群にグルーピングし、同一のグループごとに各PAA同時にビーム照射する目標の組合わせを求め、その目標に対するPRIの最大値を共通PRIとして使用し時間資源の消費を抑えるものであり、PRI共通化の他にヒット数共通化が必要となることによる時間資源の消費を考慮していないため、無駄時間を増加し、追尾可能目標数を劣化させる場合が生じるという問題がある。
【解決手段】 PRIの共通化による時間資源の消費のみではなく、ヒット数の共通化による時間資源の消費を考慮して同時ビーム照射する目標の組合わせを選定することにより、無駄時間を抑え、追尾可能目標数を極力劣化させないようにした。
(もっと読む)
車両用物体検知装置
【課題】 物体の検知頻度が低い場合でも物体検知手段の感度低下を確実に判定できるようにする。
【解決手段】 物体検知手段M1は、送信手段1,2から電磁波を所定の領域に送信し、物体により反射された電磁波を受信手段3,4で受信した結果に基づいて、距離検出手段5が少なくとも物体の距離を検出する。異常判定手段M2は、計時手段M3で計時された所定時間(例えば、3分)において、受信手段3,4により受信された電磁波の受信レベルの最大値および最小値の差が予め定められた閾値未満の場合に物体検知手段M1が異常であると判定するので、検知される物体が所々にしか存在しない砂漠の道路を走行するような場合でも的確な異常判定を行うことができる。
(もっと読む)
高炉内原料レベル測定装置
【課題】電磁波を利用した高炉内原料レベル測定装置の校正を、高炉に装着したたまの状態で簡単に実施できるようにすること。
【解決手段】電磁波を発振部1から伝播管2を通して高炉B内に放射し、高炉内原料C上面からの反射波を受信することによって発振部1から高炉内原料C上面までの距離を測定する高炉内原料レベル測定装置Aにおいて、伝播管2から高炉Bの途中の箇所であって、発振部1から測定不能距離L以上離れた位置に校正用反射板3aを挿入・退避可能な機構を設ける。通常のレベル測定時には校正用反射板3aを退避させておき、校正時に校正用反射板3aを伝播管2から高炉Bの途中の箇所に挿入させて校正処理を行う。校正用反射板3aとしては、スライド式ゲート弁3のゲート板を用いる。スライド式ゲート弁3の開閉操作は遠隔操作で行う。
(もっと読む)
レーダ装置
【課題】 本発明は、送受信部のレーダアンテナに付着した雪、泥などの汚れに起因したアンテナ感度の低下を精度良く判定できるスキャン式レーダ装置を提供する。
【解決手段】 所定の角度で順次ビームをスキャンして送信するレーダアンテナを有し、送信されたビームが前方のターゲットから反射された反射波を該レーダアンテナで受信して、ターゲットを検出するスキャン式レーダ装置において、ターゲットからの反射波信号のレベルに基づいてアンテナ感度が低下したか否かの判断を行うが、検出されたターゲットが、例えば、オートバイ等のように、検出される幅が狭い場合、或いは、元々反射波信号レベルが低い場合には、反射波信号のレベルが低くても、アンテナ感度が低下したと判定しないようにした。
(もっと読む)
レーダ型探査装置
【課題】 同一範疇の探査領域に複数のターゲットが存在する場合において、これらのターゲットの全てを探査することを可能にしたレーダ型探査装置を提供すること。
【解決手段】 送信アンテナ10により送信され、ターゲットにより反射された反射波が受信アンテナ11によって受信される。受信アンテナ11による受信信号は、STC回路26および電圧制御抵抗素子29を含むレベル制御手段により利得調整がなされる。受信アンテナ11による受信信号の受信期間内において、前記レベル制御手段によるレベル制御を不能にする非受信ウインドウを設定することにより、送受信アンテナからの探査距離を限定した形でターゲットを探査するように動作する。
(もっと読む)
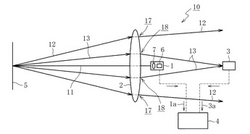
監視装置
【課題】 遠方に存在する船舶や障害などの物体を速やかに自動検知し、かつ、検知した物体の画像を表示すること。
【解決手段】 レーダ1により、物体の存在が検知された場合には、送光部21から発せられるレーザ光がその物体に照射されるように、送光部21及び受光部22の仰角及び回転角が制御装置3により動かされる。これにより、送光部21から発せられたレーザ光は、物体に反射され、この反射光が受光部22により撮像される。そして、受光部22により取得された画像が、レーザレーダ制御部24の画像処理装置により処理され、処理後の画像信号が制御装置3を介して表示装置4に供給される。これにより、表示装置4に受光部22により取得された画像が表示されることにより、その物体の形状などを確認することが可能となる。
(もっと読む)
検出システム、物体を検出するための方法、およびそのためのコンピュータプログラム
光学センサ(3)と、レーダ装置(2)と、光学センサおよびレーダ装置と通信的に接続されている信号処理部(4)と、を有する検出システム(1)である。信号処理部は、光学センサから送信されてくる第1信号に基づいて第1物体を検出し、第1物体の少なくとも1つの第1特性を決定するための、第1検出器(41、410〜413)と、レーダ装置から送信されてくる第2信号に基づいて第2物体を検出し、第2物体の少なくとも1つの第2特性を決定するための、第2検出器(42、420〜421)と、少なくとも1つの第1特性および少なくとも1つの第2特性が、所定の条件を満たした場合に、信号を生成するための、信号ユニット(43)と、を備える。さらに、物体を検出する方法であって、光学センサを用いてセンサ信号を生成するステップ(100)と、センサ信号に基づいて第1物体を検出するステップ(101)と、レーダ信号を生成するステップ(200)と、レーダ信号に基づいて第2物体を検出するステップ(201)と、センサ信号に基づいても、レーダ信号に基づいても、同じ物体が検出された場合に、検出信号を生成するステップ(300)と、を備える方法である。また、そのような方法の1つまたは複数のステップを実行するためのプログラムコードを有する、コンピュータプログラムである。 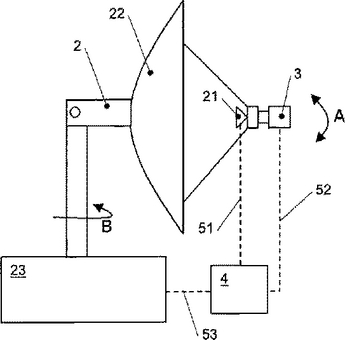 (もっと読む)
(もっと読む)
測距システム
【課題】 パルス列を構成する各パルス信号の到達時間から距離を算出する測距システムにおいて、より誤差を軽減させた高精度の距離測定を実現する。
【解決手段】 互いに等振幅で構成されるパルス信号につき等時間間隔で並べたパルス列を順次生成し、パルス列生成手段により生成されたパルス列を電波として送信する送信装置2と、送信装置2から送信された電波としてのパルス列を受信し、受信したパルス列を構成する各パルス信号の到達時間を求め、パルス信号毎に求めた到達時間につき各パルス信号間で互いに異なる重み付けをして送信装置からの距離を算出する距離算出部47を有する受信装置3とを備え、距離算出部47は、受信したパルス列を構成するパルス信号の振幅が大きくなるにつれて重み付けを重くする。
(もっと読む)
レーダ型探査装置
【課題】 広範囲のターゲットに対して利用することができる汎用性を持たせたレーダ型探査装置に対して好適に採用し得るSTC回路を提供すること。
【解決手段】 スキャン信号発生部2からのスキャン信号に基づいてランプ信号生成部4よりスローランプ信号が生成される。キャリア信号発生部1からのキャリア信号は、前記スローランプ信号により位相変調される。位相変調されたキャリア信号は波形整形回路9において、その立下がりもしくは立上がりが、より急峻となるように波形整形され、これにより発生する高次高調波が送信アンテナ11より送信される。受信アンテナ12により受信された受信信号はSTC回路29とFET28により利得制御される。この場合、STC回路29はキャリア信号に対して位相変調を行うための前記ランプ信号の波高値をそのまま利用するように構成されており、比較的単純な回路構成によって精度の高い利得制御動作が実現される。
(もっと読む)
追跡方法及び装置
人又は動物を追跡する方法を開示する。移動体装置は人又は動物によって運ばれ、この移動体装置は、少なくとも1つの慣性センサと、移動体装置から基地局へデータを送信するための無線送信機とを含む。慣性センサの出力データは人又は動物によって移動される歩数の計数に使用され、移動される歩数と人又は動物の歩幅データとに基づいて人又は動物の位置が予測される。 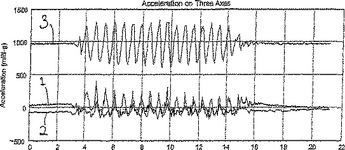 (もっと読む)
(もっと読む)
高精度の距離測定装置およびその方法
本発明の態様によるターゲットのパラメータ測定システムおよび方法が、ターゲットに少なくとも1つの信号を送信すること、および、ターゲットから送信された信号の少なくとも一部分を受信することを含む。測定されたパラメータは、距離速度または反射率の1つである。送信された信号は、コヒーレントバースト波形のものであり、受信すると、等価時間サンプリング、誤差があったとしても、誤差が最小のAGC、位相計算離散フーリエ変換で処理される。 (もっと読む)
FM−CWレーダ装置および同装置のノイズ抑制方法
【課題】FM−CWレーダ装置において、複数の装置間の電波干渉によって発生するスパイク状のノイズ成分を効果的に抑止すること。
【解決手段】連続波に周波数変調を施したFM−CW信号を送信信号として用い、受信信号と送信信号との差信号であるビート信号に基づいて目標物の相対距離、相対速度および方位の1つ以上を出力するFM−CWレーダ装置において、ビート信号をディジタル変換したディジタルビート信号に含まれるスパイク状のノイズ成分を抑制するためのスパイクノイズ抑制手段が具備され、このスパイクノイズ抑制手段によって、ディジタルビート信号の時系列データ上の一のデータと当該一のデータの直前データとの差分出力データに基づいてディジタルビート信号にスパイク状のノイズ成分が含まれているか否かが判定される。
(もっと読む)
ネットワークレーダシステム
【課題】 従来のネットワークレーダシステムでは複数レーダを管理・制御する為に中央処理系の存在を前提としていた。この為、1箇所の中央処理装置の過負荷による性能劣化と機器障害によるダウン、また当該中央処理系に繋がるデータ伝送回線へのデータ集中度が各レーダ装置とを結ぶ他のデータ伝送回線に比し高く、システム全体としてバランスに欠け、ネットワーク障害に対する脆弱性の問題があった。
【解決手段】 レーダ装置10に複数レーダ管理制御サブシステム20を付置し、また各種のデータを表示する表示装置22とデータ蓄積装置23が接続される。これら一連のシステムによりレーダサブシステム200を構成し、通信制御装置30を介してネットワーク60へ接続し、これらレーダサブシステム200の集合体がネットワークレーダシステム100を構成する。さらに、隣接レーダサブシステム同士をネットワーク予備回線50で接続した。
(もっと読む)
高周波送受信器およびそれを具備するレーダ装置ならびにそれを搭載したレーダ装置搭載車両およびレーダ装置搭載小型船舶
【課題】 送信用高周波信号をスイッチングする過渡的な状態においてノイズを含む不要な中間周波信号が受信系に出力されるのを良好に遮断できるようにすること。
【解決手段】 高周波発振器1と分岐器2とRFスイッチ3とハイブリッド4と送受信アンテナ5とミキサー6とを設けた高周波送受信器において、ミキサー6の出力端に、開状態で中間周波信号を遮断し、送信用高周波信号RFtが非出力状態で安定したときに閉状態となって中間周波信号を通過させるIFスイッチ7を設けた高周波送受信器である。ミキサー6に混入した送信用高周波信号RFtによるノイズを含む中間周波信号がミキサー6の後段に漏れることがなく、所望の中間周波信号を出力させることができる。
(もっと読む)
レーダ装置
【課題】 広帯域の電波の送受信を必要とせず、目標類別の精度が高い目標類別装置を得る。
【解決手段】 目標に送信信号を照射し、反射波を受信して受信信号を出力する送受信機20と、受信信号から目標の軌跡を推定する追尾処理部30と、受信信号を処理してクロスレンジプロフィールを生成するクロスレンジプロフィール生成部40と、クロスレンジプロフィールから特徴量を算出し、目標の類別を行う類別処理部50を備え、クロスレンジプロフィール生成部40は、オートフォーカス処理部42において受信信号のドップラー周波数の変化量を抽出し、アスペクト角変化量推定部44は、そのドップラー周波数の変化量を用いて目標のアスペクト角の変化量を推定する。そしてクロスレンジスケーリング部45において、アスペクト角変化量推定部44で推定したアスペクト角の変化量を用いてドップラープロフィールをクロスレンジプロフィールに変換する。
(もっと読む)
追尾モデルの管理
たとえばレーダによって検出された航空機など、遠方の目標の複数の軌跡を同時に維持する方法および装置が開示されている。それぞれの軌跡は、追尾目標についての、考えうる様々な力学的特性を示すモデルプロセスのセットにより、維持される。モデルは、完全にまたは大部分、互いに独立に振る舞うことができる。新たなセンサ情報を用いてモデルを更新するべきか否かは、それぞれの軌跡内のそれぞれのモデルについて、別個に決定される。 (もっと読む)
2,001 - 2,020 / 2,290
[ Back to top ]