
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
81 - 100 / 2,290
障害物検知装置及びコンピュータプログラム
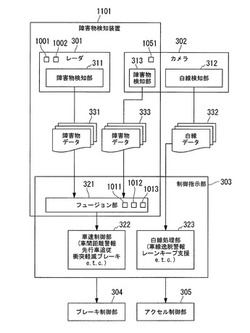
【課題】障害物検知装置1101において、障害物の誤検知を抑制する。
【解決手段】電波を送信する送信アンテナ1001と、前記送信された電波が障害物により反射された電波を受信する受信アンテナ1002と、前記受信された電波に基づいて障害物を検知する障害物検知部311と、前記検知された障害物について、あらかじめ設定された誤検知の特徴の有無を判定する誤検知判定部1011と、画像を撮像するカメラ302と、前記誤検知の特徴があることが判定された障害物について、前記カメラ302により撮像された画像に基づいて、当該障害物の有無を判定する障害物有無判定部1012と、を備える。
(もっと読む)
目標追尾装置

【課題】PRI内距離を目標の運動諸元の推定処理に利用できるようにして、目標の運動諸元の推定精度を高めることができる目標追尾装置を得ることを目的とする。
【解決手段】PRI内距離ゲート内外判定部14によりゲート内にあると判定されたPRI内距離毎に推定値の仮説を生成して、その仮説の信頼度を算出し、1以上の仮説の中で、信頼度が高い仮説を採択する推定値仮説生成部15や、推定値仮説生成部15により採択された仮説に係るPRI内距離を用いて、現時点での運動諸元の推定値を更新するPRI内距離フィルタ処理部16などを備える。
(もっと読む)
検出装置及び検出方法
【課題】本発明は従来よりも設計の自由度を向上させた等価時間サンプリング方式の検出装置を提供する。
【解決手段】送信手段(20)は、各送信パルスが所定の送信パルス繰り返し周期内に配置されるパルス列信号であって、各送信パルスの位相を当該送信パルス繰り返し周期内において段階的にシフトした送信パルス列信号を検出波として送出する。受信手段(30)は、反射波を受信して受信パルス列信号を形成し、受信パルス列信号をサンプリングして複数の受信パルスの波形データを出力する。信号処理手段(40)は、複数の受信パルスの各波形データの時間軸を各送信パルスの位相の段階的シフトに対応して調整し、各波形データを合成して一つの受信パルスの波形データを形成する。
(もっと読む)
後側方障害物検知装置
【課題】自車両が低速で走行する場合であっても、非報知対象物であるガードレール等の静止物が、報知対象物である他車両等の移動物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物と報知対象物に分類する対象物分類部と、自車両の走行速度に応じて、対象物を非報知対象物に分類する条件を制御する非報知対象物分類条件制御部とを備える。
(もっと読む)
信号生成回路、レーダー装置
【課題】低雑音で高周波数精度かつ高線形なFMCW信号を得ることのできる信号生成回路、レーダー装置を提供する。
【解決手段】アナログ制御信号により発振信号の周波数が制御される発振器を有している信号生成回路は、発振信号の位相情報を検出してディジタルの位相情報を出力するディジタル位相検出部と、ディジタルの位相情報を微分してディジタルの周波数情報を出力する第1の微分部と、発振周波数を設定する周波数設定コードとディジタルの周波数情報とを比較してディジタルの周波数誤差情報を出力する比較部と、ディジタルの周波数誤差情報の高周波成分を除去するローパスフィルタ部とを備えている。さらに、高周波成分が除去されたディジタルの周波数誤差情報をアナログの周波数誤差情報に変換するD/A変換部と、アナログの周波数誤差情報を積分してアナログの位相誤差情報に変換しアナログ制御信号として出力する積分器とを備えている。
(もっと読む)
人位置検索システム
【課題】命の危険が迫っている人の位置を特定することができる人位置検索システムを提供する。
【解決手段】本発明の人位置検索システム10は、複数の基地局30で測定した電波の送信から受信までの所要時間より、ユーザが身に付けているセンサ端末20の位置を特定し、特定した位置に、センサ端末20から送信されたユーザの生体情報を対応付けて管理する。
(もっと読む)
レーダ画像処理装置及びレーダ画像処理方法
【課題】何らかの原因で強度画像や距離画像内の画素値が異常値になっている場合でも、目標物を検出することができるレーダ画像処理装置及びレーダ画像処理方法を得ることを目的とする。
【解決手段】目標領域検出処理部12が、目標候補画素設定処理部11により設定された目標候補画素と特定物が不明な画素(目標物、背景領域及びクラッタ領域のいずれも構成していない画素)とから構成される和集合の領域の空間的な大きさが、予め設定されている目標物の空間的な大きさと近似しているか否かを判定する。
(もっと読む)
レーダ装置
【課題】 ステップ周波数をパルス信号帯域よりも大きくした場合においても、曖昧なく距離計測可能なレーダ装置を提供することを目的としている。
【解決手段】 ステップ周波数ずつ周波数が異なる受信パルス信号に基づく合成帯域処理により距離計測を行うレーダ装置であって、前記合成帯域処理が行われる前記受信パルス信号のスペクトルの帯域外の成分を強調する帯域外成分強調フィルタ処理を行うフィルタ処理器と、を備えたものである。
(もっと読む)
物体検出装置
【課題】移動体に搭載した場合に、受信信号のSN比の向上を実現しながらも、検出対象とする物体の相対速度の範囲を当該移動体の速度に応じて変更することを可能にする物体検出装置を提供する。
【解決手段】移動体に搭載され、複数のパルスからなる複数のパルス列で構成される送信信号を発生するパルス発生器1と、パルス発生器1の発生する送信信号について、所定の符号系列に従って送信信号のパルス列毎にデジタル変調を施した変調信号を出力する信号変換器2と、信号変換器2の出力する変調信号を送信波として送波するとともに、その送信波の反射波を受波するマイク6と、マイク6で受波した反射波から得られる受信信号と前記変調信号との符号の相関値を求め、その結果により反射波から得られる受信信号をパルス圧縮するパルス圧縮手段とを備え、移動体の速度に応じて、信号変換器2において用いる符号系列の長さを変更する。
(もっと読む)
レーダ装置
【課題】各送信側系統間の動作を同期させるための回路構成を追加せずに、簡易な構成により複数のレーダ信号を分離する。
【解決手段】第1レーダ送信部は、所定の符号長の符号系列を、第1符号幅を用いて所定数繰り返した第1変調信号を送信する。第2レーダ送信部は、同じ符号系列を、第2符号幅を用いて所定数繰り返した第2変調信号を送信する。レーダ受信部は、第1符号幅と第2符号幅の差分値よりも小さいサンプリング周期で離散信号に変換するA/D変換部と、A/D変換部からの出力信号を、第1符号幅に応じた所定のサンプル数分遅延させる第1遅延部と、第2符号幅に応じた所定のサンプル数分遅延させる第2遅延部と、A/D変換部と第1遅延部とからの各出力信号とを基に第1相関値を算出する第1相関値算出部と、A/D変換部と第2遅延部とからのからの出力信号とを基に第2相関値を算出する第2相関値算出部とを用いて複数の受信信号を分離する。
(もっと読む)
無線測位システムおよび無線測位装置
【課題】照明設備に近接して設置された無線基地局と、移動端末との間で、一方向通信もしくは時分割で双方向通信を行うことによって、移動端末、RFIDタグ、もしくはこれらの両方の2次元もしくは3次元の位置を高精度で測位できる無線測位システムおよび無線測位装置を安価に実現する。
【解決手段】無線信号を用いて2次元もしくは3次元の位置を測位するために、無線基地局を照明設備の内部もしくは外部に近接して設置し、前記照明設備に電力を供給するための配電ケーブルをツイストペアとし、前記配電ケーブルを介して照明設備と無線基地局とに電力を給電するとともに、前記無線基地局にデジタル信号を伝送する。
(もっと読む)
映像表示装置及びレーダ装置
【課題】必要な領域にのみ信号処理を行って、場所に応じた的確な情報を取得可能な映像表示装置を提供する。
【解決手段】レーダ指示器は、表示部と、マウスと、レーダ映像生成部と、を備える。表示部は、レーダアンテナが受信したエコー信号に基づくレーダ映像を表示する。マウスは、レーダ映像が表示される領域から一部の領域を選択する操作が可能である。レーダ映像生成部は、マウスにより選択された領域である選択領域と、選択領域以外の領域と、で異なる信号処理を行ってレーダ映像を生成する。
(もっと読む)
移動物体検出装置
【課題】複数の移動体を単一の移動物体であると誤認識してしまう状況の発生を抑制
【解決手段】移動物体検出装置1は、レーダ波を前方に向けて送信し、送信したレーダ波の反射波を観測した結果に基づいて、レーダ波を反射した反射点の位置である反射点位置を連続して検出する。検出された2つの反射点位置のうち、移動物体検出装置1から遠い方の反射点位置である第1反射点位置を移動物体における前端部の位置であるとし、移動物体検出装置1から近い方の反射点位置である第2反射点位置を移動物体における後端部の位置であるとして、第1反射点位置と第2反射点位置との間の距離である反射点間距離の時間経過による変動量が、反射点間距離の変動量が小さいことを示す予め設定された変動判定条件を満たす場合に、第1反射点位置および第2反射点位置がそれぞれ移動物体の前端部および後端部の位置であると判断する。
(もっと読む)
自律移動システム、その制御方法及びプログラム
【課題】距離検出手段の揺動範囲を適切に設定し、最適に障害物を検知できる自律移動システム、その制御方法及びプログラムを提供すること。
【解決手段】自律移動システムは、移動体に設けられ、検出領域内の障害物の距離を検出する距離検出手段と、距離検出手段の検出領域をヨー方向へ揺動させる揺動手段と、揺動手段の揺動を制御する揺動制御手段と、を備えている。また、揺動制御手段は、障害物の位置に応じて、揺動手段を制御して距離検出手段の検出領域の揺動範囲を制限している。
(もっと読む)
物体識別装置、および物体識別プログラム
【課題】車両の周囲に存在する物体の種別を識別する物体識別装置において、物体を正確に識別できるようにする。
【解決手段】衝突防止システムにおいては、自車両の周囲に音波または電磁波を照射して該音波または電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物体までの距離の情報を含む物体情報を取得し(S110)、物体の高さの情報を取得する(S130)。そして、物体の高さおよび物体までの距離に応じて反射強度を補正し(S140)、補正後の反射強度に応じて物体の種別を識別する(S170〜S280)。よって、反射強度を正常に検出することを妨害する要素を除外するように反射強度を補正することができ、正確に反射強度を検出できるようにすることで、物体を正確に識別することができる。
(もっと読む)
レーダ装置、検査システム、及び検査方法
【課題】レーダ装置の検査を実施する環境として適切であるか否かを判定可能とすること。
【解決手段】レーダ装置30で実行する信号解析処理では、動作モードが環境検査モードであれば(S210:YES)、比較固有値λMの各々について固有値比SlMを算出する(S220)。この固有値比SlMは、強い相関を有する到来波に対応する固有値λ同士の間で導出されたものであれば小さな値となり、到来波に対応する固有値λと熱雑音に対応する固有値λとの間で導出されたものであれば大きな値となる。そして、基準閾値Th以下となる固有値比SlMが存在しなければ(S230:NO)、軸検査を実施する環境として適している旨を出力し(S240)、基準閾値Th以下となる固有値比SlMが1つでも存在すれば(S230:YES)、軸検査を実施する環境として不適である旨を出力する(S250)。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な前記物体単位データを抽出する。そして、自車と先行車との間における自車の走行路上および先行車と先々行車との間における先行車の走行路上のいずれかに停止物体が存在する場合、抽出した物体単位データの中から前記走行路上の停止物体に該当するデータを削除する。この後、左角度方向から右角度方向及び右角度方向から左角度方向の両方向についてそれぞれ、接続条件として距離が単調増加であるデータ同士をグルーピングして路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。
(もっと読む)
追尾装置
【課題】センサと目標との距離が大きい場合には追尾維持性能を発揮し、センサと目標との距離が小さい場合には、各追尾目標に対する追尾精度を向上させる。
【解決手段】センサを介して2つの観測値を取得した場合に、センサ位置を基準点とした2つの観測値のなす角度を算出する角度算出部21と、角度算出部21により算出された2つの観測値のなす角度に基づいて2つの観測値に対する重み係数を算出し、重み係数に基づいて各観測値の各観測値間での重心をそれぞれ算出する角度基準重心算出部22と、角度基準重心算出部22により算出された各観測値の重心および各追尾目標に対する予測値に基づいて、各追尾目標に対する平滑値を算出する平滑処理部24とを備えた。
(もっと読む)
レーダ装置
【課題】目標の検出性能と測距性能を高めることができるレーダ装置を得ることを目的とする。
【解決手段】距離−ビート周波数マップに対してCFAR処理を実施することで目標候補を検出する目標候補検出処理部13と、目標候補検出処理部13により検出された異なる時刻の目標候補のPRI内の距離とビート周波数から目標相対速度を算出する目標相対速度算出処理部14とを設け、目標相対距離算出処理部15が、目標候補検出処理部13により検出された目標候補のPRI内の距離及びビート周波数と目標相対速度算出処理部14により算出された目標相対速度から目標相対距離を算出する。
(もっと読む)
物体検知装置
【課題】画像処理による負荷を極力増大させることなく歩行者等の存在を検知できる物体検知装置を提供する。
【解決手段】物体検知装置は、強度が第1閾値以上である反射波の方向の範囲を物体が存在する物体範囲として、物体の幅を算出する物体幅算出手段33と、物体の幅が所定幅以上である幅広の物体に係る反射波の強度等が特定の状況にある場合、第1閾値よりも大きな第2閾値により、幅広の物体に係る物体範囲を分割する物体範囲分割手段36と、その物体範囲の分割後の各範囲に対応する画像データに基づき、目的物を検出する処理を行う目的物検出手段39とを備える。
(もっと読む)
81 - 100 / 2,290
[ Back to top ]