
Fターム[5J070AC02]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439)
Fターム[5J070AC02]の下位に属するFターム
Fターム[5J070AC02]に分類される特許
121 - 140 / 2,290
物標検出装置、物標検出方法およびプログラム
【課題】歩行者の位置を正確に検出することができる物標検出装置、物標検出方法およびプログラムを提供する。
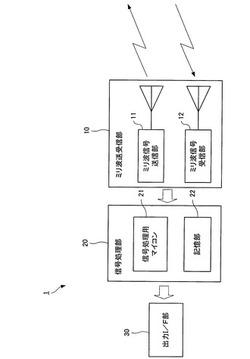
【解決手段】車両の前方に向かって電波を送信する送信部11と、反射電波を受信する受信部12と、物標が歩行者であるか車両であるかを判定する情報処理を行うとともに、車両に対する物標の位置を演算して求める情報処理を行う情報処理部21と、情報処理部21における情報処理の内容が予め記憶された記憶部22と、が設けられている。記憶部22には、物標が歩行者である場合に行われる歩行者用情報処理の内容、及び、物標が車両である場合に行われる車両用情報処理の内容が予め記憶されている。情報処理部21は、物標が歩行者であると判定された場合には、記憶部22から取得した歩行者用情報処理の内容に基づいて情報処理を行い、物標が車両であると判定された場合には、記憶部22から取得した車両用情報処理の内容に基づいて情報処理を行う。
(もっと読む)
歩行者検出装置、歩行者検出方法およびプログラム

【課題】歩行者をより確実に検出することができる歩行者検出装置、歩行者検出方法およびプログラムを提供する。
【解決手段】車両の前方に向かって電波を送信する送信部11と、車両の前方に存在する物標によって反射された電波である反射電波を受信する受信部12と、歩行者によって反射された電波の特性である歩行者反射電波特性が予め記憶された記憶部22と、受信部12により受信された反射電波の特性を、記憶部22に記憶された歩行者反射電波特性と対比することより、電波を反射した物標が歩行者であるか否かの判定を行う情報処理部21と、が設けられている。受信部12により受信された反射電波の特性と、記憶部22に記憶された歩行者反射電波特性とを対比させることにより、電波を反射した物標が歩行者か否かの判定を行うことで、物標における移動の有無や、移動方向に関わらず、物標が歩行者か否かの判定を行うことができる。
(もっと読む)
指示支援装置
【課題】本発明は、近接した複数の目標から到来した反射波、またはその反射波が示す画像を処理することにより、これらの複数の目標の区分を図る指示支援装置に関し、近接した複数の目標の寸法ならびに相対的な配置に柔軟に適応し、これらの目標の区分のために要する処理量を安定に削減できることを目的とする。
【解決手段】到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する判別手段と、前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する適応処理手段とを備える。
(もっと読む)
レーダ装置
【課題】レーダ装置において生成する物標情報の信頼性を向上させること。
【解決手段】方位解析処理では、角度差絶対値abが閾値α以下となる到来波の組合せがあれば(S390:YES)、その組合せを構成する到来波についての到来方位θA,θBの中間地点を仮想方位とし、その仮想方位に受信波ビームを向けたときの電力を、仮想電力として導出する(S400)。その仮想方位及び仮想電力を方位情報の1つとして、到来波の各々についての到来方位θ及び到来電力(即ち、方位情報)に加えて登録する(S420)。つまり、方位解析処理では、複数の到来波に対する各到来方位のうち、隣接する2つの物標からの到来波に対する到来方位の間の角度範囲が分離能以下となる場合には、より確からしい方位情報として仮想方位及び仮想電力を導出し、物標認識処理にてペアマッチングを実行する際に用いる。
(もっと読む)
レーダ装置
【課題】レーダ装置において、ターゲットからの反射波に含まれるドップラスペクトルの広がりに拘わらず、簡易な構成を用いてコヒーレント積分利得あるいはノンコヒーレント利得を高める。
【解決手段】レーダ送信部は、送信信号を高周波送信信号に変換して送信アンテナから送信する。レーダ受信部は、複数の受信アンテナを用いて、ターゲットにより反射された反射波の到来方向を推定する。レーダ受信部は、受信信号と送信信号との相関値を基に、複数のドップラ周波数に応じた位相変動の補正量を用いてコヒーレント積分する複数のアンテナ系統処理部と、複数のコヒーレント積分の各出力を基に、各受信アンテナの配置に起因する位相差情報である相関行列を、ドップラ周波数毎に生成する複数の相関行列生成部と、複数の相関行列生成部の出力を加算する加算部と、加算部の出力を基に、反射波の到来方向を推定する到来方向推定部と、を有する。
(もっと読む)
レーダ装置、バス、および乗客移動検出方法、並びにプログラム
【課題】車内を移動中の乗客の有無を検出すること。
【解決手段】レーダ波の反射物の車内における位置情報を、反射が起こった位置およびその位置の反射頻度として取得する位置情報取得部21と、取得した反射頻度を、バスの短手方向に加算する反射頻度加算部22と、位置情報取得部21および反射頻度加算部22による処理を、車内に乗客が乗車していないときに予め行って取得した位置情報を記憶する記憶部23と、位置情報取得部21および反射頻度加算部22による処理を、車内に乗客が乗車しているときに行って取得した位置情報から記憶部23に記憶されている位置情報を減算し、その減算結果として乗客の位置情報を検出する乗客位置検出部24と、乗客位置検出部24が検出した異なる時刻の乗客の位置情報を比較して車内を移動中の乗客を検出する乗客移動検出部25と、を有するレーダ装置1を構成する。
(もっと読む)
車両用障害物検出装置
【課題】車輪判定時に不要な対象物を除去し、自車の車輪がターゲットであると誤検知することがなく、障害物検出精度の向上を図る車両用障害物検出装置を提供する。
【解決手段】バンパと車輪との間に設けられて車両外方へ送信波を送信することにより障害物を検出する検出手段と、
検出手段の検出結果に基づいて障害物を判定する判定手段R1と、判定手段R1の検出結果により自車の車輪を検出した時、車輪を検出対象から除去する除去手段S8,S9とを備えたことを特徴とする。
(もっと読む)
障害物検知装置
【課題】 障害物検知装置において、車両と障害物との距離を測定して使用者に報知するだけでなく、使用者が自在に設定した距離が、車両と障害物との距離の報知を妨げることなく報知されるようにすることである。
【解決手段】 車両1の障害物検知装置100は、領域P1〜P4に対応する報知形態で、そのときの衝突回避距離を使用者に報知するという従来の機能(第1の機能)に加えて、使用者が自在に設定した距離(例えば、バックドア開放距離L)を報知する機能(第2の機能)を有する。しかも、バックドア開放距離Lの報知は、衝突回避距離の報知に重ねて、しかも両者が混同しないような報知形態で報知される。
(もっと読む)
車両用物体検出装置
【課題】電磁波を用いて物体を検知する場合、路側に存在する物体が誤まって自車の進路に侵入したと誤検知されるのを防止するようにした車両用物体検出装置を提供する。
【解決手段】自車の進路を推定し(S12)、検知された物体が進路の側方に存在する路側物か否か判定し(S14)、推定された進路と路肩との境界線を設定し(S16)、検知された物体が進路の側方に存在する路側物と判定されるとき、物体を構成する点群のいずれかが境界線を越えて自車の進路に侵入したか否か判定し(S18からS22)、点群のいずれかが境界線を越えて進路に侵入したと判定されるとき、物体を障害物と判定する(S24)。
(もっと読む)
レーダ装置及び監視方法
【課題】航空機の予測位置を正確に特定し、捕捉する。
【解決手段】モードS二次監視レーダは、航空機データ記憶部と、質問生成部と、算出部と、更新部とを備える。航空機データ記憶部は、次のスキャンにおける航空機の位置情報である予測位置を含む航空機データを記憶する。質問生成部は、ロールコール期間において、航空機データに含まれる航空機に対し、ロールコール質問又は航空機に搭載されるトランスポンダのGICBレジスタのパラメータを含む応答の送信を要求する要求信号を生成し送信手段に出力する。算出部は、受信手段がロールコール質問に対して受信した応答に含まれる航空機の位置又はGICBレジスタのパラメータに含まれる航空機の動態情報から当該航空機の予測位置を算出する。更新部は、算出部で算出された予測位置で航空機データを更新する。
(もっと読む)
車載用レーダ装置
【課題】電流検出抵抗を用いることなく、チョッパ型電源回路の内部回路消費電流異常又は電力変換効率異常を検出できる車載用レーダ装置を得る。
【解決手段】チョッパ型電源回路の入力電圧を取得する入力電圧取得回路13と、チョッパ型電源回路のデューティ比を電圧に変換するデューティ比電圧変換回路9と、チョッパ型電源回路の入力電圧とデューティ比変換電圧との正常時の相関テーブルとを備え、デューティ比電圧変換回路9で得られるデューティ比変換電圧を、入力電圧取得回路13で得られる入力電圧を基に、前記相関テーブルと比較して、チョッパ型電源回路の内部回路消費電流異常又は電力変換効率異常の電源系異常を検出する。
(もっと読む)
アンテナ装置
【課題】簡単(低コスト)な構成で、少なくとも方位の検出対象の角度範囲である検出角度範囲内では位相折り返し(偽像)の影響を抑制して高精度の方位検出を行うことが可能なアンテナ装置を提供する。
【解決手段】送信アンテナ30は、予め設定された配列方向に沿って所定の送信側配置間隔Dtを隔てて配置された複数の送信側単位アンテナ31,32,33,34からなり、複数の受信アンテナ10,20は、それぞれ、上記配列方向に沿って所定の配列間隔Ddで配列されていると共に、各受信アンテナ10,20の各々は、上記配列方向に沿って所定の受信側配置間隔Drを隔てて配置された複数の受信側単位アンテナ11,12(21,22)からなる。そして、受信側配置間隔Drは送信側配置間隔Dtよりも大きい。
(もっと読む)
レンジサイドローブ除去装置、信号処理装置、同信号処理装置を備えたレーダ装置、レンジサイドローブ除去方法及びプログラム
【課題】レンジサイドローブによる偽像を低減し、物標を確実に検出する。
【解決手段】レーダ装置1において、レンジサイドローブ除去装置36は、レーダーアンテナ10からの受信信号を取得し、パルス圧縮処理を行ってパルス圧縮信号を生成するパルス圧縮部33と、受信信号から、パルス圧縮信号のレンジサイドローブの擬似信号を生成する擬似レンジサイドローブ生成部34と、パルス圧縮信号から擬似信号に相当する成分を除去する信号除去部35と、を備える。
(もっと読む)
追尾装置
【課題】テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得る。
【解決手段】目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、これらの相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。追尾フィルタ装置200は、目標抽出装置100が出力した追尾点に基づいて、3次元空間上での追尾点の位置、速度、強度の予測を行い、次のフレームの追尾予測値として出力する。
(もっと読む)
パルスレーダ装置及びその制御方法
【課題】ノイズ信号のレプリカ信号を生成して受信信号から除去することにより、対象物の情報を高精度に検出することが可能なパルスレーダ装置及びその制御方法を提供する。
【解決手段】パルスレーダ装置100では、高周波送信部110、高周波受信部120等を配置する高周波用基板103と、ベースバンド部130を配置する低周波用基板104との間を、多ピンのコネクタ105を用いて電気的に接続している。ディジタル信号処理部132は、コネクタ105において制御信号がベースバンド信号に与える干渉ノイズ信号や、搬送波が反射されてダウンコンバートされたセルフミキシングノイズからなる不要波のレプリカ信号を作成する。そして、対象物Tの検出時に得られる信号からレプリカ信号を除去する。本実施形態では、2回のレーダ動作でレプリカ信号を作成することができる。
(もっと読む)
レーダ装置
【課題】自車と反射物体との相対距離や相対速度に関わらず、前方にある反射物体を自車が跨いで走行可能な低位置物体であると判別できるレーダ装置を提供する。
【解決手段】同定部17が同定した同一の反射物体について、記憶部16が記憶した今回の信号処理周期と直近の過去数回までの所定周期分の測定結果から得る相対距離および反射強度から相関係数を算出する相関係数算出部18と、相関係数算出部18が算出した相関係数が所定条件である場合に、反射物体5が低位置物体であると判別する低位置物体判別部19とを備える。
(もっと読む)
踏切障害物検知装置
【課題】周囲温度の変化等にかかわらず踏切道内における障害物の有無を安定して検知することのできる踏切障害物検知装置を提供する。
【解決手段】踏切障害物検知装置1は、踏切道10を含む検知領域内に電波を送信するとともに、この送信した電波に対する反射波を受信する送受信機2,3と、送受信機2,3によって受信された反射波の信号レベルと、あらかじめ設定された閾値とを比較して踏切道10内における障害物の有無を判定する信号処理部6と、を含む。信号処理部6は、送受信器2,3による電波の送信が可能な領域内に存在する特定の固定物(例えば反射板4a,5a)による反射波の信号レベルを監視し、この監視された反射波の信号レベルが変動した場合に送受信器2,3によって受信された反射波の信号レベル又は上記閾値を補正する。
(もっと読む)
パルスレーダ装置及びその制御方法
【課題】多ピンコネクタを用いて装置を小型に実現しつつ、受信強度を超過する干渉ノイズ信号を低減し、かつ、該干渉ノイズ信号のレプリカを高速に更新し、物体検出を確実に実施することが可能なパルスレーダ装置及びその制御方法を提供する。
【解決手段】対象物情報検出処理を行うときは、高周波送信部110で送信信号を生成するパルス繰返し周期Tplsに第1のパルス繰返し周期Tpを設定し、レプリカ信号作成するときは、周期Tpより短いパルス繰返し周期Tplsに第2のパルス繰返し周期Tzを設定し、処理を行う。
(もっと読む)
衝突回避装置、ヘリコプタ、及び衝突回避プログラム
【課題】ヘリコプタが障害物に近接した状態でも、ヘリコプタの障害物への衝突を回避する飛行を可能とする、ことを目的とする。
【解決手段】ヘリコプタ10は、GPS受信部34によって、受信したGPS信号に基づいて自機の位置を検知し、距離センサ18によって、自機と周囲の障害物との距離を測定する。そして、ヘリコプタ10は、詳細情報生成部40によって、地図情報記憶装置52に記憶されている地図情報から距離センサ18で検知した自機の位置を含む自機周囲情報を読み出し、読み出した自機周囲情報と距離センサ18による測定結果とから、自機の周囲の形状を示す自機周囲詳細情報を生成し、飛行制御部32によって、自機周囲詳細情報と自機の大きさとに基づいて、自機が障害物へ衝突することを抑制するための制御を行う。
(もっと読む)
車載用レーダ装置
【課題】対象物の水平方向方位と鉛直方向方位の両方を検出するコストを低減した車載用レーダ装置を得る。
【解決手段】送信部から送信され対象物より反射された電波を、水平方向に複数配列された第1の受信アンテナ素子と、第1の受信アンテナ素子と同一平面状に第1の受信アンテナ素子とは別に鉛直方向に複数配列された第2の受信アンテナ素子とにより受信し、受信した信号と送信部から分配された信号とをミキサにより混合し、ダウンコンバートされた信号を受信アンプにより増幅する受信部と、受信部からの受信信号に基づき、所定範囲内に存在する対象物の距離,相対速度,方位を検出する信号処理部とを備える車載用レーダ装置において、受信部を構成するミキサの後段に、第1又は第2の受信アンテナ素子と同数の回路切替部を備え、回路切替部により第1の受信アンテナ素子への接続と、第2の受信アンテナ素子への接続とを切り替える。
(もっと読む)
121 - 140 / 2,290
[ Back to top ]