
Fターム[5J070AC03]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439) | 高度又は深度 (125)
Fターム[5J070AC03]に分類される特許
21 - 40 / 125
レーダ装置
【課題】ターゲットから反射波を受信した際に、当該ターゲットが上方構造物であるか車両であるかを判別できるようにする。
【解決手段】演算処理器26は、反射波の強度の2階微分値を算出し、当該2階微分値に基づいてターゲット32が上方構造物であるか車両であるかを判別する。または、反射波の強度波形を周波数成分に分離し、特定の周波数成分の強度に基づいてターゲット32が上方構造物であるか車両であるかを判別する。
(もっと読む)
車両感知器

【課題】安価な構成で、道路を通過する車両の種々の情報を取得することができる。
【解決手段】道路を通過する車両の高さを検出するための車両感知器であって、道路に向かって無線信号を送信し、送信した無線信号が反射した無線信号を受信するための送受信部51と、送受信部51によって受信された無線信号に基づいて、無線信号が反射した位置と送受信部との間の距離を測定するための距離測定部52と、距離測定部52の測定結果に基づいて、道路を通過する車両の高さを算出するための車高算出部52とを備える。
(もっと読む)
埋設物探査装置
【課題】地中レーダ装置の受信信号に含まれる縞状ノイズ成分を容易に除去して画像の視認性を向上する。
【解決手段】2次元画像データにおける全ての反射時間軸方向の1次元画像データf(t)について、1次元ウェーブレット解析により時間−周波数領域へ変換して時間−周波数データを算出して縦縞ノイズの周波数成分を算出した後、ノイズ成分を抽出する第1フィルタリング処理を実行し、元の2次元画像データから抽出した縦縞ノイズ成分を除去する第2フィルタリング処理を実行して縦縞ノイズを除去し、更に、2次元画像データにおける全ての移動距離軸方向の1次元画像データf(t)について、同様のノイズ除去処理を実行して横縞ノイズを除去する。
(もっと読む)
パッシブレーダシステムおよびパッシブレーダ方法
【課題】長時間積分時にも評価関数Pの先鋭度が劣化せず、低S/N環境下やステルス目標など低RCSの移動目標に対しても、検出・標定精度を高める。
【解決手段】散乱波を受信して時系列データを生成する第1の受信系と、直接波を受信して時系列データを生成する第2の受信系と、両時系列データに基づく相互相関を演算し、移動目標に対する到来時間差およびドップラ周波数差を観測情報として特定する相互相関演算手段(16)と、観測情報と測角値情報とを用いて、移動目標の位置を得る目標標定手段(17)とを備えるパッシブレーダ装置(10)を異なる位置に複数台配置し、各パッシブレーダ装置は、相互の観測情報を送受信する通信手段(18)と、すべてのパッシブレーダ装置で特定されたそれぞれの観測情報に基づいて、移動目標の瞬時速度ベクトルを推定する瞬時速度ベクトル推定手段(19)とをさらに備える。
(もっと読む)
測距環境模擬装置
【課題】本発明は、飛しょう体や航空機等のプラットフォームに搭載され、かつFMCW方式が適用された測距装置の機能試験、あるいはその測距装置を含む系のシステム試験等に供される測距環境模擬装置に関し、測距装置の位置や姿勢の多様な形態に対して柔軟に追従し、測距装置の性能や機能の試験および評価を精度よく実現できることを目的とする。
【解決手段】FMCW方式の測距装置に到来する受信波に付帯するドップラ周波数を算出するドップラシフト算出手段と、前記測距装置によって送信された送信波に同期して、前記ドップラ周波数のドップラシフトとを模擬する周波数変換を前記送信波に施し、前記周波数変換の結果を前記受信波として前記測距装置に与える周波数シフト模擬手段とを備える。
(もっと読む)
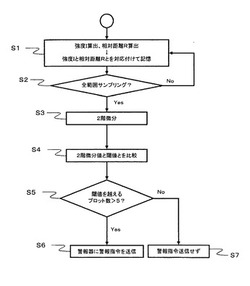
物体変位監視装置、及び物体変位監視方法
【課題】物体の変位を精度の良く監視する物体変位監視装置、及び物体変位監視方法を提供することを課題とする。
【解決手段】物体変位監視装置は、互いに高さの異なる複数の反射板に照射されたレーダの反射波に基づき生成された測定データから、互いに高さの異なる複数の反射板からの反射波による領域データを抽出し、抽出された領域データを所定の範囲ごとにグループ化し、グループ化された領域データに基づき測定対象物の変位を監視する。
(もっと読む)
物体検出装置
【課題】物体の誤検知を抑制する。
【解決手段】物体検出装置10は、自車両からの所定角度範囲の検知領域を複数の垂直角度領域および水平角度領域に分割する。物体検出装置10は、複数の垂直角度領域毎に、複数の水平角度領域毎に向けて発信された電磁波に対応して検出された複数の反射点を、反射点の位置に基づき複数のセグメントに分類するセグメント生成部32と、所定位置範囲内に存在するセグメントからなり、かつ固有の物標を有する物標対象を生成する物標対象生成部33と、物体検出部37とを備える。物体検出部37は、物標対象生成部33によって生成された物標対象のうち、単一の垂直角度領域でのセグメントのみで構成された物標対象により物体を検知する。
(もっと読む)
レーダ装置およびセンサインタフェース装置
【課題】本発明は、速度センサまたは加速度センサと共に同じ移動体に搭載されたレーダ装置と、これらのセンサの何れかとレーダ装置とのインタフェースをとるセンサインタフェース装置に関し、構成が大幅に複雑化することなく、目標との相対距離が広範かつ急激に増減する状態であっても性能を高く安定に維持できることを目的とする。
【解決手段】波動信号に応じて目標から到来した到来波に基づいて前記目標の速度、距離、位置、性質の何れかの識別を行うレーダ装置であって、前記レーダ装置と共に同じ移動体に搭載された速度センサまたは加速度センサを用いて前記波動信号が送信される方向における前記移動体または前記レーダ装置の速度を特定し、前記速度に応じて前記波動信号に生じるドップラシフトを特定するドップラシフト特定手段を備え、前記レーダ装置は、前記波動信号の周波数を前記ドップラシフトに亘って補正する補正手段を有する。
(もっと読む)
機体座標において目標に対する干渉角を決定するための方法および装置
【課題】航空機機体座標内で目標への物理的角度を求めるためにレーダエコーデータを処理する方法を提供する。
【解決手段】このレーダエコーデータはアンビギュオウスレーダチャネル(226)と左のレーダチャネル(224)で受信されるレーダエコーデータ間の位相差、右のレーダチャネル(228)とアンビギュオウスのレーダチャネル(226)で受信されるレーダエコーデータ間の位相差、および右のレーダチャネル(228)と左のレーダチャネル(224)で受信されるレーダエコーデータ間の位相差を含む。本方法は3つの位相差について位相バイアスを調節するステップ(570、572、574)と、3つの位相差間の位相のアンビギティーを解析することで信号を供給するステップ(576)と、航空機機体座標内で目標への物理的角度を与えるためにその信号をフィルタ処理するステップ(578)とを含む。
(もっと読む)
地中における沈下計測方法及びその装置
【課題】 簡単に設置することができ、沈下板の位置の変化を容易に計測することができる地中における、沈下計測方法及びその装置を提供する。
【解決手段】 地中における沈下計測方法において、先端に沈下発信装置3を装着した沈下板4を有するコーン2を地中1に差し込み、このコーン2を引き抜く際にアンカー5をセットして前記沈下発信装置3及び前記沈下板4を前記地中に定着させ、地上に沈下計測装置6を配置し、前記沈下発信装置3と前記沈下計測装置6との間の通信に基づいて、前記沈下板4の沈下量を求める。
(もっと読む)
空中気象レーダ体積バッファを使用して雹および雷を推定するシステムおよび方法
【課題】起こり得る雷および雹の気象条件の出力を改善する気象レーダシステムを提供すること。
【解決手段】例示的なシステムは、気象レーダ反射率値を受信して、3次元バッファ内に記憶し、外部空気温度値を受信し、受信した外部空気温度値に基づいて凍結レベルを決定するプロセッサを含む。プロセッサは、決定された凍結レベルよりも上の3次元バッファのセルに記憶された反射率値が第1の閾値量よりも大きいとき、雷アイコンを生成する。また、プロセッサは、決定された凍結レベルに1.6kmを加え、決定された凍結レベルと1.6kmとの和におけるセルに記憶された反射率値が第2の閾値量よりも大きいとき、雹アイコンを生成する。生成された雹および雷アイコンに関するセルに対応する高度値が、表示用に選択されたとき、表示装置は、雹および雷アイコンを表示する。
(もっと読む)
航空機位置測定システム、該システムに用いられる応答信号判別方法及び応答信号判別プログラム
【課題】受信局で受信される信号のみでモードA応答かモードC応答かが判別可能な航空機位置測定システムを提供する。
【解決手段】位置情報処理手段(データ処理部30)では、応答信号種類判別手段(受信情報収集部31、信号抽出記録部34、モードC信号変換部35、モードC信号種類判定部36、モードA信号変換部37、モードA信号種類判定部38)により、各受信局21,22,…,25で受信された応答信号のビット列が気圧高度情報(モードCコード)に変換されると共に、同気圧高度情報と幾何学的高度情報とが比較され、この比較結果に基づいて、上記応答信号がモードA信号に対応するモードA応答か上記モードC信号に対応するモードC応答かが判別される。
(もっと読む)
航空機情報表示装置、航空機情報表示方法、航空機情報表示プログラム
【課題】航空機の飛行状態の確認がしやすく、かつ、ホールディング状態の把握がしやすい航空機情報表示装置を提供する。
【解決手段】当該航空機の位置を表すデータであるセンサデータを取得するセンサデータ取得部と、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部と、前記航空機がどのエリアに存在するかを表す画像を表示する表示部と、前記センサデータ取得部が取得したセンサデータと、前記エリア記憶部に記憶された第1または第2の座標情報と、に基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定し、判定した結果に基づいて、前記表示部に表示させる制御部と、を有する。
(もっと読む)
レーダ画像処理装置
【課題】従来のセンサと対象物のアジマス方向およびエレベーション方向の角度、距離からの高度情報による樹木頂点の検出手法、またDSMと、DEMの差から高度情報を得、各画素の高度差を用いた樹冠領域抽出方法は、何れも低SNR下での高度情報誤検出発生時は、樹木の誤抽出を引き起こす可能性が高い。
【解決手段】移動体搭載のレーダにより得られた、観測対象物体までのレーダとの距離と、観測対象物体のレーダに対するアジマス方向角度とエレベーション方向角度を用いて、高度画像作成処理手段が各画素の所定の基準からの高度値を算出して高度画像を生成し、積分範囲設定手段で決定された範囲の高度値を高度積分図作成手段で積分して高度積分図を作成し、この高度積分図を基に物体検出処理手段で観測対象物体の検出を行い、表示手段が観測対象物体が存在する画素または実空間上の位置を表示する。
(もっと読む)
レーダ装置
【課題】周波数ホッピングの実行の有無にかかわらず、DBF方式レーダおよびモノパルス方式レーダへの適用が可能で、かつ低演算量なMLEを用いる測高法を実現したレーダ装置を得る。
【解決手段】アンテナ1からの受信信号から複数チャネルの受信信号を生成する受信機2と、複数チャネルの受信信号からディジタル信号に変換した複数チャネルの受信信号ベクトルを出力するAD変換器3と、受信信号ベクトル、ビーム指向方向情報、目標距離情報、目標高度想定範囲および海面反射係数想定範囲を入力情報として、目標の測高値を算出する目標測高手段4とを備えている。目標測高手段4は、受信信号ベクトルから相関行列を算出する手段と、各種情報からアレーマニフォルドを算出する手段と、相関行列およびアレーマニフォルドから測高値を算出する手段とを含む。
(もっと読む)
レーダ波浪解析装置
【課題】波浪情報の解析精度を向上する。
【解決手段】レーダ波浪解析装置10は、レーダ12の回転により得られる海面反射信号に対して2次元FFT処理を行うことにより2次元の波浪スペクトルを求める2次元演算手段16と、レーダ12の観測領域30での水深dに基づき作成され、観測領域30での浅海変形の影響を受けた海面反射信号に対応する波浪スペクトルを補正するための補正マップ20と、2次元演算手段16から出力された波浪スペクトルを補正マップ20で補正し、補正後の波浪スペクトルに基づいて観測領域30での波浪情報を取得する波浪情報取得手段25とを有する。
(もっと読む)
地盤変化の調査方法
【課題】より正確な調査結果が得られる地盤変化の調査方法を提供する。
【解決手段】本発明は、地盤上の複数の調査ポイントPSiの座標の生の変化量ΔBX(PSi)、及び、地盤上の少なくとも1の参照ポイントPRiの座標の生の変化量ΔBX(PRi)を提供する工程と、参照ポイントの座標の真の変化量ΔRX(PRi)を決定する工程S110と、調査ポイントの座標の生の変化量、参照ポイントの座標の生の変化量、及び、参照ポイントの座標の真の変化量に基づいて、調査ポイントの座標の補正された変化量ΔCX(PSi)を算出する工程S130と、を備えている。
(もっと読む)
物標情報推定装置
【課題】レーダ波を用いて検出される物標に関する情報(少なくとも路面からの高さ)を少ない処理負荷で検出する。
【解決手段】判定の対象となる選択物標との距離が100mより大きく(S410:YES)、且つ、中位物標のヌル距離ではない(S420:YES)場合、選択物標の受信電力がヌルポイント(外挿フラグGF=1又は前サイクルの受信電力との電力差ΔPが10dB以上)になっていれば(S430:YES or S460:YES)、その選択物標を高位物標と判定する(S440)。選択物標との距離が100m以下(S410:NO) の場合は、選択物標の受信電力がヌルポイントになっていれば(S470:YES or S500:YES)、その選択物標を中位物標と判定し(S480)、ヌルポイントになっていなければ、その選択物標を低位物標と判定する(S510)。
(もっと読む)
同一領域上で取得されたSAR画像から得られるインターフェログラムのフィルタリング処理方法
【課題】合成開口レーダにより同一領域上に取得されたインターフェログラムについて、取得可能な全てのインターフェログラム及びその精度と関連してフィルターが施された位相値を考慮したベクトルを求めることができるフィルタリング処理方法を提供する。
【解決手段】合成開口レーダにより同一領域上に取得されたインターフェログラムに対するフィルタリング処理であって、a)共通格子上のデータの再サンプリングが可能となるような取得図形を有する同一領域上で、SARセンサにより一連のN個のレーダ画像(A1…AN)を取得し、b)共通格子上で再サンプリングした後、その共通格子から画素を選択し、c)取得可能な画像対のそれぞれに対して複素コヒーレンス値を推定するために、選択された画素のコヒーレンス行列を算出し、d)この時点では未知数であるソースベクトルθに関して、Rは複素数の実部を抽出する演算子、γnmはコヒーレンス行列の要素(n、m)の係数、kは正の実数、φnmはコヒーレンス行列の要素(n、m)の位相、θn及びθmは未知ベクトルθの要素n及びmである下記の式を最大化するステップを備えている。位相差のみが関数Tに与えられた場合には、未知ベクトルの値は、θ1=0とすることで決定できる付加定数より小さい値として推定され、このようにして得られた位相値θnは、フィルターの施された位相値のベクトルの構成要素となる。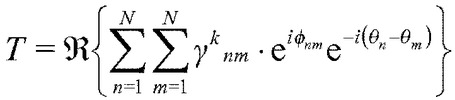 (もっと読む)
(もっと読む)
検査レーダ装置
【課題】検出感度の向上したレーダ装置を提供することにある。
【解決手段】送信アンテナ101は、パルス発振器103が出力する振幅の異なる複数のパルスを波動に変換して被検査物に放射する。受信アンテナ102により受信された波動の反射波は、アナログ・ディジタル変換器106によりディジタル値に変換され、計算機201に取り込まれる。パルス幅制御器108は、パルス発振器103が出力する複数の振幅の異なるパルスに対して、それぞれ、異なるパルス幅のパルスを出力するように、パルス発振器103を調節する。
(もっと読む)
21 - 40 / 125
[ Back to top ]