
Fターム[5J070AC03]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439) | 高度又は深度 (125)
Fターム[5J070AC03]に分類される特許
61 - 80 / 125
目標高度計測方法、目標高度計測方式及びレーダ装置
【課題】距離と方位角のみを計測する従来の二次元レーダにより等高度で等速直線運動する目標の高度を推定する。
【解決手段】距離と方位角のみを計測する従来の二次元レーダにおいても、等高度で等速直線運動を行う目標について、3スキャン分の目標の検出距離と検出方位角を用いて目標の高度を推定する。
(もっと読む)
感知可能な動き検出器

幾らかの実施形態では、第1の調節可能なレンズを有する第1のセンサと、第2の調節可能なレンズを有する第2のセンサと、を備える装置が開示される。コントローラは、第1のセンサおよび第2のセンサに連結される。コントローラは、第1モードにおいて第1のセンサおよび第2のセンサを独立して動作させ、第2モードにおいて第1の動きセンサおよび2の動きセンサを相互依存させて動作させる。 (もっと読む)
測定装置
【課題】ドップラーレーダなどの測定装置において、測定結果の信頼性を正しく判定する。
【解決手段】振幅測定部141は、受信部113が受信した反射波502のピーク時刻における振幅を測定する。参照値測定モードにおいて、振幅測定部141が測定した反射波502の振幅を振幅記憶部151が記憶しておく。高度・速度測定モードにおいて、振幅測定部141が測定した反射波502の振幅と、振幅記憶部151が記憶しておいた反射波502の振幅とを、振幅判定部155が比較し、振幅の差が許容範囲内であるか否かを判定する。振幅の差が許容範囲内であると振幅判定部155が判定した場合、信頼性出力部156は、状態算出部130が算出した測定結果の信頼性が高いことを表わす信号を出力し、振幅の差が許容範囲外であると振幅判定部155が判定した場合、信頼性出力部156は、測定結果の信頼性が低いことを表わす信号を出力する。
(もっと読む)
埋設深さ測定方法及びその装置
【課題】埋設物の埋設深さの測定誤差を低減し、測定精度を上げることを目的とする。
【解決手段】検査媒体中に埋設された埋設物の埋設深さ測定方法である。送信部と受信部を平面上に近接配置した第1送受信ユニット26の第1送受信データと、前記第1送受信ユニット26と同一平面上であって送信部と受信部の中心に前記第1送受信ユニットの中心を配置した第2送受信ユニット30の第2送受信データとから得られる最も短い反射時間の伝播速度を演算処理して、見かけ上の埋設物の埋設深さを求め、前記埋設物の埋設深さに対して送受信ユニットと検査媒体との間の空隙により生じる屈折率の補正を行い、実際の反射時間を求めて前記埋設物の埋設深さを補正演算する。
(もっと読む)
3次元高度探知鳥類レーダー用装置および方法
高度探知3次元鳥類レーダーは、アンテナの指向仰角を変更する手段を備える方位角スキャンレーダーを備えている。仰角の変更は、多重ビームを備えたアンテナを用いるか、仰角方向走査手段を用いるか、異なる仰角を指向する2つのレーダーを用いることにより行える。異なる仰角で放射されたビームで探知された鳥などのターゲットからの受信反射波の解析により、ターゲットの高度が特定される。 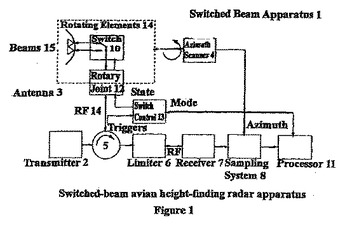 (もっと読む)
(もっと読む)
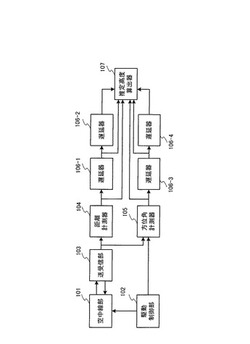
情報処理装置及び情報処理方法及びプログラム
【課題】航空機や人工衛星等の移動プラットフォームに搭載され、地表面の高分解能画像及び高度情報を得る干渉型合成開口レーダ装置において、自機高度の測定誤差による地表面の高度情報の誤差を推定して補償することを可能とした干渉型合成開口レーダ装置を提供する。
【解決手段】機体の機軸と直交する平面内で直線状に3つ以上のアンテナ1〜3を配置し、この3つのアンテナで受信されたパルス信号及び動揺センサ4の計測結果を用いて3つの合成開口レーダ画像7を取得し、更に、3つのレーダ画像から2つの観測領域の高度情報9を取得し、2ベースラインによる誤差推定部10が、この得られた高度情報の差分から誤差を推定して補償し、インタフェロメトリ再処理部11が、再度干渉型合成開口レーダの処理を行うことにより、地表面の高度誤差が抑圧された誤差抑圧後の観測領域の高度情報12が得られる。
(もっと読む)
乱気流検出装置及び方法並びにそのプログラム及びそれを格納する記憶媒体
【課題】航空機の飛行空域に存在し得る乱気流発生空域を検出して安全且つ快適な飛行を支援する乱気流検出装置及び方法並びにそれをコンピュータに実行させるプログラム及びそれを格納する記憶媒体を提供する。
【解決手段】レーダー装置20に基づいて、コンピュータ120のアプリケーションプログラム130により航空機の位置情報及び高度情報を検出して乱気流発生空域の存在を判定・検出する。そして、航空機の高度差が設定時間内に高度基準値を超え且つそれが所定回数以上発生したとき乱気流発生空域と判定し、航空機の飛行空域情報と共に乱気流発生空域をディスプレイ110に表示して、管制官が後続航空機40の飛行ルートの変更等を指示することを可能にする。
(もっと読む)
レーダ画像処理装置
【課題】2以上のレーダ画像を用いて算出した地形の高さの誤差の2次元的分布をレーダ画像から算出する。
【解決手段】2以上の受信局で観測されたレーダ画像を格納するレーダ画像格納部1と、それらのレーダ画像から地表面の高さを算出する処理で用いられた処理パラメータ等を格納する観測・処理パラメータ格納部2と、レーダ画像間のコヒーレンスからコヒーレンスマップを求めるコヒーレンスマップ計算部200と、マルチルック数とコヒーレンスマップとに基づいて位相誤差を算出する位相誤差計算部300と、観測・処理パラメータ格納部2に格納された地表面の高さの変化に対するレーダ画像間の位相差の変化の感度を算出する位相標高感度計算部400と、算出された位相誤差に基づいて測高誤差の分布を求める測高誤差計算部500と、それを格納する測高誤差分布格納部3とを備えている。
(もっと読む)
標高モデル生成装置、標高モデル生成方法および標高モデル生成プログラム
【課題】航空機、人工衛星等の移動プラットフォームに搭載した合成開口レーダによって取得した画像データ及び地表面表層データ(地物を含んだ標高)を使って、地物を抽出及び除去して、地表面標高データ(地物を除いた標高)を作成する。
【解決手段】データ格納部110は画像データ及び地表面表層データを複数セルに分割して、セル毎に画像データの強度情報と地表表層データの高度情報を記憶装置190に格納する。データ選択部120は所定の強度以上のセルを抽出する。地物背面セル選択部130はデータ取得時の撮像方向を参照して、地物背面セルを選択する。地物セル生成部140はデータ選択部120が抽出したセルと地物背面セル選択部130が選択した地物背面セルとをもとに地物の輪郭線を生成する。データ置換部150は地物セルの標高データを地物セル周辺の標高データの平均値に置換して地表面標高データを生成する。
(もっと読む)
電子走査レーダのビーム制御装置
【課題】複数のアンテナを装備し、同時に複数のアンテナ面で捜索および多目標追尾を行う電子走査レーダにおいて、アンテナ面間の電波干渉を回避するために設定する送信ディレイ時間により、ビーム切換タイミングで発生する無駄時間を極小化すること。
【解決手段】同一目標に対するビーム照射時間を、電子走査アンテナ毎に決定された送信パルス幅、パルス繰り返し周波数(PRI)、送信パルス幅の送信パルスを受信するための受信時間、同一目標を追尾するために必要な所要ヒット数および、これらを元に算出された、電子走査アンテナ間で電波干渉を回避可能なPRI、送信ディレイ時間、ビーム切換タイミングを揃えるための加算時間に基づいて決定する。
(もっと読む)
対象物体の高さ評価法及びレーダーシステム
【課題】低い対象物体及び高い対象物体間を識別する車両用レーダーシステムの提供。
【解決手段】本発明は、対象物体(202)が反射したレーダー信号(206,209)を使用して対象物体の高さを評価する方法及びレーダーシステムに関する。レーダーシステムは、受信器(43)、プロセッサ(44)、相関器(45)及び決定回路(47)を有する。受信器は、対象物体が反射した複数のレーダー信号を検出する。プロセッサは、異なる複数の射程のそれぞれで複数の反射信号の振幅を解明して対象物体振幅データ組を生成する。相関器は、対象物体振幅データ組が対象物体の特定高さと相関があるかどうかを決定する。決定回路は、対象物体の高さが、対象物体振幅データ組と最もよく合致する保存された振幅データ組の一つに対応する高さであると宣言する。
(もっと読む)
電波高度計
【課題】正確な残留高度を常に用いて高度の補正をする電波高度計の提供。
【解決手段】メモリ回路52には、搭載される可能性のある全ての航空機に関し、計算により求めた残留高度HOffが航空機の機体情報150に対応して予め格納してある。選別回路51は、電波高度計に電源が投入されたときに、機体情報150を読み取る。機体情報150は、航空機の機種、機体内ケーブルの電気長L1,L2等の当該航空機における残留高度HOffを規定する情報であり、コネクタ300に接続された電子回路の回路構成でもって、表されている。メモリ回路52から機体情報150に対応する残留高度HOffが読み出される。測定高度補正部6は、信号402で表される見掛けの高度Hxから残留高度HOffを差し引くことにより、実際の測定高度Htを生成し、信号106で出力する。
(もっと読む)
干渉レーダ・システムにおいて高品質位相角測定値を識別する方法及びシステム
複数のアンテナ・レーダ・高度計を用いてレーダ・ターゲットに対する機械的角度を求める方法を説明する。方法は、レーダ・エコー信号を複数のアンテナ(202、208)で受信し、電気的フェーズ角度の計算値であいまい性レゾリューション・マトリックスをポピュレートし、電気的フェーズ角度の計算値からの逸脱量を最も少ないものとする機械的角度をあいまい性レゾリューション・マトリックスから選択し、少なくとも1つの別の分散計算を用いて、選択された機械的角度に関連する品質を求める。  (もっと読む)
(もっと読む)
航空機の高度監視警報装置
【課題】有視界飛行を行う小型機(VFR機)に対し、高度監視警報を行う。
【解決手段】レーダ機器1で捕捉した航空機Aの現在位置における高度位置から、下方へ向けて設定したバイアス距離Bが、予め設定された最低安全高度に抵触すると判定器6が判定したとき、管制官は、通信機器7を介して、航空機Aに向けて警報を発するように構成したので、簡単な構成により、小型機に対する高度監視警報を適切かつ容易に行うことができる。
(もっと読む)
目標類別装置
【課題】特徴量の信頼性の動的な変動を考慮することで、より高精度な区間値ファジィ推論方式による目標類別を可能とする目標類別装置を得る。
【解決手段】目標観測手段101により類別対象の目標が有する特徴量を得て、特徴量と特徴の度合いを表す入力ファジィ区間値とを関連付けたメンバシップ関数106と、メンバシップ関数106の区間の幅として定義できる特徴の曖昧さを特徴量から信頼性算出処理部108により算出された信頼性係数とを用いて、区間値ファジィ化処理部102により目標観測手段101によって得られた特徴量のファジィ化を行い、入力ファジィ区間値を得て、これから推論処理部103により目標種類の確からしさを表す出力ファジィ区間値を算出し、非ファジィ化処理部104によって算出された出力ファジィ区間値から目標種類を確定し、表示装置105に表示する。
(もっと読む)
非破壊探査装置及びその方法並びにプログラム
【課題】浅い位置に埋設された埋設物の位置及び形状の検出を従来例に比較して高い精度で行え、従来には行えなかった埋設物の材質の推定を行う非破壊探査装置を提供する。
【解決手段】本発明の非破壊探査装置は、送信波を発信し、反射波を受信するマイクロ波レーダ部と、反射波形から送信波形を減算して差分波形を求める差分計算部と、差分波形及び送信波形の相互相関のヒルベルト変換を行い、複素反射係数の絶対値のモデル適応度関数を得る相互相関ヒルベルト変換部と、モデル適応度関数の時間差の最大値及び最大値の時間差を保持し、所定の時間差幅の境界モデル適応度関数に変換する境界モデル適応度演算部と、測定点毎の反射波の境界モデル適応度関数を考慮点の信頼度とし、反射波の境界モデル適応度関数のヒストグラムにより逆投影画像を生成する逆投影像生成部と、逆投影画像にてヒストグラムの極大値を与える送信波形の位相を求める位相検出部とを有する。
(もっと読む)
目標位置確認システム及びレーダ信号処理装置
【課題】レーダ設置場所から見た移動目標の方位・距離のずれ調整作業を迅速かつ適切に行えるようにし、これにより作業の精度向上と作業時間短縮を図ることを可能とする目標位置確認システムを提供する。
【解決手段】滑走路RWY周辺に既知のGPS装置200を設置するだけでよく、またGPS装置200にPAR100への計測位置情報の送信機能を持たせることで、PAR100において自装置の経度緯度情報とGPS装置200の計測位置情報とを利用して、PAR100から見た航空機の方位・距離のずれを容易に調整できるようにしている。
(もっと読む)
埋設物探査装置
【課題】地中電路工事などを行う場合、施工図による埋設物位置が違っても目的埋設物を事前に探査して、他の埋設物の破損や危険を防止することが出来る埋設物探査装置を提供する。
【解決手段】携帯送受信機(携帯電話)1、地表付近に設けられた無線中継器3、埋設識別シート6、光ケーブル6等の埋設物に取り付けられた無線ICタグ5からなる埋設物探査装置において、携帯送受信機(携帯電話)1から探査信号を電磁波として送信する。無線中継器3により中継された探査信号を無線ICタグ5が受信すると、無線ICタグ5は探査信号が自身に対するものである場合、識別情報を含む応答信号を電磁波として送信する。無線中継器3は識別情報を表示するとともに応答信号を中継する。携帯送受信機(携帯電話)1は応答信号を受信して解読することにより埋設物の名称などが容易に判別できる。
(もっと読む)
レーダ画像処理装置及びレーダ画像処理方法
【課題】地表面の変化を正確に抽出することができるレーダ画像処理装置及びレーダ画像処理方法を提供する。
【解決手段】通信インターフェース部10が、異なる時刻に取得された同一観測対象の複数のレーダ画像データを取得してレーダ画像保持部12に格納し、位置合わせ処理部14が、上記複数のレーダ画像データをレーダ画像保持部12から読み出し、各レーダ画像データを相互に位置合わせする。次に、特性値算出部18が位置合わせ後のレーダ画像データから観測対象である地表の状態を表す複数の特性値を算出する。変化候補域抽出部34は、上記特性値毎に変化候補域を抽出し、判別法決定部24が決定した閾値、抽出条件及び判別関数を使用して、判別部36が上記変化候補域から観測対象の変化域を抽出する。
(もっと読む)
電磁波による鉄筋コンクリート構造物の非破壊検査装置及び方法
【課題】 内部に鉄筋が埋め込まれた鉄筋コンクリート構造物のクラック、空洞等からの反射波信号をより確実に検出する。
【解決手段】 内部に鉄筋9が埋め込まれた鉄筋コンクリート構造物6の表面上の複数位置に移動可能な検査装置本体1と、検査装置本体に搭載され、鉄筋コンクリート構造物に向けて電磁波を照射する電磁波照射手段2と、検査装置本体に搭載され、前記電磁波照射装置から照射された電磁波の反射波信号を取得する受波手段3と、受波手段によって取得された反射波信号を信号処理することによって鉄筋コンクリート構造物の欠陥を検出する信号処理手段4とを有し、受波手段は、検査装置本体の移動にともなって、位置の異なる複数の反射波信号を取得し、信号処理手段は、前記受波手段によって取得された位置の異なる複数の反射波信号を加算又は平均することによって前記鉄筋からの反射波信号成分を低減し、鉄筋コンクリート構造物の欠陥を検出する。
(もっと読む)
61 - 80 / 125
[ Back to top ]