
Fターム[5J070AC04]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439) | 水平距離 (24)
Fターム[5J070AC04]に分類される特許
1 - 20 / 24
測距環境模擬装置
【課題】本発明は、飛しょう体や航空機等のプラットフォームに搭載され、かつFMCW方式が適用された測距装置の機能試験、あるいはその測距装置を含む系のシステム試験等に供される測距環境模擬装置に関し、測距装置の位置や姿勢の多様な形態に対して柔軟に追従し、測距装置の性能や機能の試験および評価を精度よく実現できることを目的とする。
【解決手段】FMCW方式の測距装置に到来する受信波に付帯するドップラ周波数を算出するドップラシフト算出手段と、前記測距装置によって送信された送信波に同期して、前記ドップラ周波数のドップラシフトとを模擬する周波数変換を前記送信波に施し、前記周波数変換の結果を前記受信波として前記測距装置に与える周波数シフト模擬手段とを備える。
(もっと読む)
航空機情報表示装置、航空機情報表示方法、航空機情報表示プログラム

【課題】航空機の飛行状態の確認がしやすく、かつ、ホールディング状態の把握がしやすい航空機情報表示装置を提供する。
【解決手段】当該航空機の位置を表すデータであるセンサデータを取得するセンサデータ取得部と、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部と、前記航空機がどのエリアに存在するかを表す画像を表示する表示部と、前記センサデータ取得部が取得したセンサデータと、前記エリア記憶部に記憶された第1または第2の座標情報と、に基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定し、判定した結果に基づいて、前記表示部に表示させる制御部と、を有する。
(もっと読む)
測距システムおよびその測距方法
【課題】測定対象が特定されていない多数の被測定物までの測距を、正確に行うことが可能な測距システムおよびその測距方法を提供する。
【解決手段】被監視者が携帯する無線タグ20と、無線タグ20までの距離を測定する測距装置30とを測距システム10において、測距装置30は、無線タグ20に、応答要求通知をブロードキャストにより送信し、応答要求通知に対する返信通知を受信すると、返信通知を送信した無線タグ20のアドレスを指定して測距要求通知を送信し、測距要求通知を送信してから測距要求通知に対する測距応答通知を受信するまでの時間を計測することで、距離を算出する。無線タグ20は、応答要求通知を受信すると、無線タグ20ごとに設定された異なる時間が経過した後に、割り当てられたID情報をアドレスとして含めて返信通知を送信し、測距要求通知にて指定されたアドレスが、自アドレスであるときには、測距応答通知を送信する。
(もっと読む)
車載レーダ装置
【課題】簡易な構成でありながら車両探知時に適切な補正を行って早期かつ確実に前方車両の探知を行うことができる車載レーダ装置を提供することを課題とする。
【解決手段】車載レーダ装置2には、ライト制御ECU3、ACC装置4、電動パワーステアリングECU(EPS)5、ナビゲーションシステム6が電気的に接続されている。ライト制御ECU3は、ヘッドライトのON/OFFに関するライトスイッチ情報を取得する。また、ヘッドライトやテールライトの点灯、消灯を行ういわゆるオートライト機能に用いられる照度センサから自車両周囲の照度値を取得する。ライト制御ECU3は、さらに、サスペンションの荷重状態、伸縮度合いから自車両の傾き情報を得るべく縦方向指示情報を取得する。この縦方向指示情報は、車両の前後方向の傾斜を把握する際に利用される情報で、この情報を用いて測定情報の補正を行い、ターゲットの判断に用いる。
(もっと読む)
物体判定装置、方法及びプログラム
【課題】前処理を行うことなく、移動物体であるか静止物体であるか判定する。
【解決手段】物体判定装置は、物体までの距離を測定して距離データを生成する距離測定装置1と、距離データから位置データを生成する処理を行う距離データ処理部2と、位置データを記憶する位置データ記憶部3と、位置データの集合である位置データ集合を抽出する位置データ集合抽出部4と、位置データ集合の領域面積に基づいて物体が移動物体であるか静止物体であるかを判定する移動物体判定部5と、を備えている。
(もっと読む)
障害物検知システム
【課題】複数のレーダ装置を備えた車両において電波干渉が生じた場合、送信周波数等を変更して電波干渉を回避しなくてはならない。本発明は、各レーダ装置の送信周波数等の情報を共有化することにより、送信周波数等の変更後に、再び他レーダ装置との電波干渉を引き起こさないようなレーダ装置を提供する。
【解決手段】近接した複数のレーダ装置が、通信を介してお互いの変調態様情報を共有することにより、外界からの電波干渉時でも共有相手に対する電波干渉が発生しないようにする。
(もっと読む)
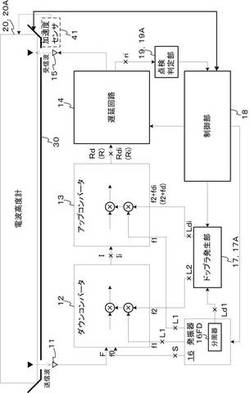
距離計
【課題】 被測定物までの距離が近い場合の距離計測において、コストの増大を抑制することを目的とする。
【解決手段】 前記測定用信号に同期して繰返し周期T1を有する第1の信号を発生し、又、前記反射信号に同期して繰返し周期T2を有する第2の信号を発生する信号発生手段と、前記第1の信号と第2の信号との位相差を検出する位相差検出手段と、前記第1の信号または第2の信号の繰返し数を計数する計数手段と、前記第1の信号と第2の信号とが同位相になるまでの前記繰返し数n、前記第1の信号の繰返し周期T1、前記第2の信号の繰返し周期T2及び前記送受信時間ΔTに基づいて送受信時間ΔTを算出し、当該送受信時間ΔTに基づき前記被測定物までの距離を求める演算手段とを具備する。
(もっと読む)
物体検知装置
【課題】 FM−CWモードで物体を検知する物体検知装置の異常を精度良く判定する。【解決手段】 送受信アンテナ6から送信する電磁波の周波数を連続的に変調する物体検知用のFM−CWモードと、送受信アンテナ6から送信する電磁波の周波数を変調しない異常判定用のCWモードとを切り換え、FM−CWモードの受信信号の信号レベルが第1判定閾値以下であり、かつCWモードの受信信号の信号レベルが前記第1判定閾値よりも高い第2判定閾値以下であるときに異常を判定するので、FM−CWモードの受信信号の信号レベルだけ、あるいはCWモードの受信信号の信号レベルだけから異常を判定する場合に比べて判定精度を高めることができ、しかも物体検知用のFM−CWモードの機能が健在なのに、異常判定用のCWモードの機能が失われたことで異常と判定されてしまう不具合を回避することができる。 (もっと読む)
レーダ装置およびそのレーダ信号処理方法
【課題】距離と相対距離の大小関係に係わらず、距離と相対速度とを取り違えることのないレーダ装置を得る。
【解決手段】複数の算出式によりターゲットの距離Rまたは相対速度Vを算出する距離・速度算出手段303と、算出された距離または相対速度から次回観測時点における予測距離算出式を求める予測手段304と、現観測時点の距離算出式が予測距離算出式と等しいか否かを判定する相関判定手段305と、予測距離算出式と等しい場合のみに算出結果を出力するターゲット選択手段306とを備えている。予測手段304が次回観測時点における距離および相対速度と距離算出式を予測して、相関判定手段305が現観測時点の結果と予測手段304の結果について相関を判定し、ターゲット選択手段306が相関判定手段305の判定結果を受けて相関がある現時点の算出結果のみを出力する。
(もっと読む)
先行車認識装置
【課題】 レーダー装置が電磁波を送信および受信する検知エリアの端部における物体の横方向位置の検知精度を簡単な演算で高める。
【解決手段】 レーダー装置は扇形の検知エリアに入った物体からの反射波の中心を物体の位置として検知する。レーダー装置の検知エリアの端部にターゲットの一部だけが入って検知された場合に、その検知位置はターゲットの中央位置であるB位置からずれたA位置になるが、ターゲットである車両の車幅の半分に相当する距離(例えば0.9m)だけ、前記A位置を横方向外側に移動させたB位置をターゲットの検知位置として算出することで、ターゲットの一部だけが検知エリアに入った場合でも、そのターゲットの横位置を正しく算出することができる。
(もっと読む)
車両用物体認識装置
【課題】レーザレーダセンサ5の高さ方向における中心レーザ光の中心軸角度と基準角度ΔAとのずれ角度を求める対象車種の制限を緩和し、もって、レーザレーダセンサ5の向きの変化を検出する機会を増加すること。
【解決手段】
Y軸方向における個々のレーザ光のビーム幅が、リフレクタ位置の設置高さのばらつき範囲をカバーできるまで広がる距離Zよりも遠方に前方車両が位置する場合に、その前方車両のリフレクタからの反射レーザ光を生じさせたレーザ光の面番号を検出する。これにより、前方車両のリフレクタ設置高さの変化に起因して、そのリフレクタからの反射レーザ光を生じさせるレーザ光の面番号が変化することを抑制できる。従って、複数個のレーザ光の面番号の平均値に基づいて、高さ方向におけるレーザ光の中心軸角度と基準角度ΔAとのずれ角を示す上下光軸ずれ学習角度θuを精度よく算出することができる。
(もっと読む)
特定エリアを検出対象とするレーダ
【課題】 特定エリアを検出対象とするレーダの検出処理速度を向上させる。
【解決手段】 対象物に反射した反射波を受信してビート信号を生成するレーダ受信部201と、ビート信号から検出エリア103以外の信号を除外するフィルタ部202と、フィルタ処理されたビート信号をデジタル化するA/D変換部203と、デジタル化されたビート信号に対してFFT処理を行なうFFT処理部204と、FFTデータから対象物の距離や相対速度等を検出する車両検出部205と、を少なくとも備えるFM−CW方式のレーダを提供する。
(もっと読む)
障害物検出装置
【課題】路面反射板や路面上方構造物を障害物として判断しない障害物検出装置を提供すること。
【解決手段】先行車両検出装置13において、上方照射波30と下方照射波31とは一部重なり合いを生じるように照射波を照射して、上方照射波30と下方照射波31とのそれぞれの反射波強度から照射波が反射した物体の種類を判定するようにした。
(もっと読む)
先行車両検出装置
【課題】路面を先行車両と誤認識することのない先行車両検出装置を提供すること。
【解決手段】自車両から照射した照射波の反射波を受信して先行車両の有無を検出する先行車両検出装置において、照射波が路面に照射される走行状態を検出する走行状態検出手段と、走行状態検出手段により照射波が路面に照射される走行状態であることが検出されたとき、反射波の波形に基づいて照射波を反射した物体が先行車両か路面かを判定する判定手段と、を備えた。
(もっと読む)
移動体の周囲物体検出装置及び移動体の周囲物体検出方法
【課題】検出精度を向上させることのできる移動体の周囲物体検出装置及び方法を提供する。
【解決手段】複数の検出手段X(i),X(i+1)・・を有し、各検出手段は、自車両の周囲に存在する物体を検出するセンサ部13と、センサ部13で検出された物体と自車両との間の相対位置データを求める位置算出手段14と、センサ部13の検出データに基づいて、自車両と物体との間の相対位置データの確信度データを求める確信度演算手段15とを有する。そして、各検出手段で求められた確信度データに基づいて、この検出手段で求められた相対位置データを重み付け処理し、重み付け処理された各相対位置データに基づいて、自車両と物体との相対位置を求める統合座標算出手段11を備えたことを特徴とする。
(もっと読む)
車両用後側方警報装置
【課題】 ガードレールや壁等の路側の静止物に対しては警報せず、後方から接近する車両や自車両の死角領域に留まる車両に対しては確実に警報する車両用後側方警報装置を提供する。
【解決手段】 警報対象判定手段は、ピーク検出手段により求められたピークタイミングをもとに着目するサンプリングタイミングを設定する着目サンプリングタイミング設定手段と、着目されたサンプリングタイミングのFFT演算結果について、周波数閾値設定手段により設定された周波数閾値以上の周波数成分が存在するか否かを判定する周波数判定手段とを備え、前方接近物認識手段により、物体が自車両の前方方向から接近していると判定された場合において、周波数判定手段により周波数閾値以上の周波数成分が存在すると判定されたときに、この物体は静止物であるとして警報対象でないと判定する。
(もっと読む)
周波数変調レーダの信号処理装置
【課題】ディジタル信号重畳に起因したビート信号上の不要信号誤検知を良好且つ適応的に抑制した周波数変調レーダの信号処理装置を得る。
【解決手段】ビート信号Bの周波数解析部1と、周波数解析部1の解析結果から目標物体を検出する目標検出部2と、周波数解析部1の解析結果からランダム雑音のレベルNiを検出するランダム雑音レベル検出部6と、周波数解析部1の解析結果からランダム雑音以外の不要信号のレベルUiを検出する不要信号レベル検出部3と、ランダム雑音・不要信号の各レベルNi、Uiに基づいて、不要信号除去用のスレッショルド値ThUを設定するスレッショルド値設定部5とを備えている。
スレッショルド値設定部5は、不要信号の発生が既知のビート周波数に対しては、不要信号・ランダム雑音の各成分の大きさからスレッショルド値ThUを設定し、目標検出部2は、スレッショルド値ThUを用いて目標物体を検出する。
(もっと読む)
車外監視装置、及び、この車外監視装置を備えた走行制御装置
【課題】誤認識を排除し、撮像手段とレーダ手段から取得できる可能な限りの多くの情報を用いて精度の良い制御を可能とする。
【解決手段】フュージョン立体物確認部18は、フュージョン立体物設定部17から入力される画像立体物単体のフュージョン立体物、ミリ波立体物単体のフュージョン立体物、画像立体物とミリ波立体物との組み合わせによるフュージョン立体物の全ての立体物に判定を行い、画像情報を基に予め定めておいた横方向の応答性遅れによるゴースト判定、壁反射によるマルチパスによるゴースト判定、及び、先行車からの反射波によるゴースト判定の条件を満たすミリ波立体物単体のフュージョン立体物を虚像であると判断する。この虚像との判定結果は設定時間維持される。こうして虚像と判断された立体物は、その後の制御対象からは除かれる。
(もっと読む)
レーダ装置の軸ずれ検知方法および検知装置
【課題】 車両単体でレーダ装置の軸ずれ検知を行うことができるようにする。
【解決手段】 車両のレーダ装置取り付け位置前方であってレーダ装置100の検知方向とは異なる方向にある車体の一部に微小反射材を配置し、検知方向にアンテナの指向方向を一致させてレーダ装置100を車体101に取り付け、このようにして取り付けられたレーダ装置100を用いて微小反射材に関する基準データを取得し、車両の使用時にレーダ装置100によって微小反射材に関する使用時データを取得し、基準データと使用時データとを比較して比較結果が予め設定された一定値を超える場合レーダ装置100の軸ずれと判断する。
(もっと読む)
車両の駐車過程用の幾何学的形状データを検出するための方法
車両の駐車過程用の幾何学的形状データを検出するための方法において、車両が駐車スペースに沿って側方を走行する間、複数回に渡り、相前後し、車両と車道縁との間の側方間隔が、車両固定式で配設されている間隔センサを用いて測定される。車両縦軸線と車道縁との間の角度が次の検出により決定される、即ち、駐車スペースに沿った走行時に車両の横運動から得られる、目下の車両縦方向と規定の縦方向との間の横運動角度を検出すること、車道縁の輪郭延在態様から得られる、規定の縦方向と車道縁との間の車道縁角度を検出すること、及び、横運動角度と車道縁角度とを加算することによって目下の車両縦軸線と車道縁との間の角度を検出することである。 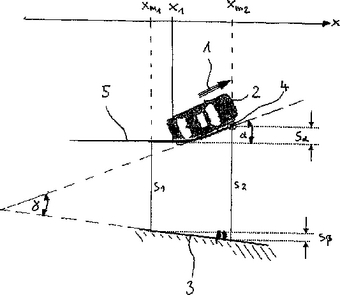 (もっと読む)
(もっと読む)
1 - 20 / 24
[ Back to top ]