
Fターム[5J070AC06]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 速度 (1,297)
Fターム[5J070AC06]の下位に属するFターム
Fターム[5J070AC06]に分類される特許
201 - 220 / 1,238
走行支援装置
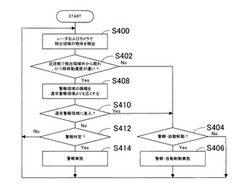
【課題】車両の前方の検出領域において、車両の進路に向かって横方向から検出領域に進入した物体を極力速く検出して警報を指令するとともに、誤検出を考慮して不適切な衝突回避の実行を防止する走行支援装置を提供する。
【解決手段】走行支援装置は、検出領域の外部から検出領域に、車両の進路に向かって横方向から進入した物体の横移動速度が所定速度以上であり、かつ物体と車両との距離が所定距離以下である場合(S402:Yes)、検出領域の範囲内で通常警報領域の側方に通常警報領域よりも横方向に広がる拡張警報領域を設定する(S408)。車両支援装置は、通常警報領域の外部の拡張警報領域の範囲内であれば(S410:No)、運転者によりブレーキ操作およびステアリング操作がなされておらず、車両と物体との衝突予測時間が所定の警報時間以下の場合(S412:Yes)、運転者に対する警報だけを車両制御ECUに指令する(S414)。
(もっと読む)
周波数計測装置、周波数計測方法、速度計測装置及び速度計測方法

【課題】簡易な装置で短時間に周波数を計測する。
【解決手段】計測対象としての移動体によって反射されたマイクロ波を、電気信号に変換する。次に、この電気信号が増幅されることにより生成された電気信号を、第1出力回路13を用いて、第1出力回路13を構成するハイパスフィルタの減衰特性に応じた電圧レベルの直流信号SD13に変換する。同時に、第2出力回路14を用いて、第2出力回路14を構成するローパスフィルタの減衰特性に応じた電圧レベルの直流信号SD14に変換する。そして、直流信号SD13の値と直流信号SD14の値とを用いて、電気信号の周波数を算出する。
(もっと読む)
物体検知装置
【課題】 物体検知手段で検知した物体が、そのまま跨いで走行しても特に支障のない物体であるか、接触を回避する必要がある物体であるかを早期に識別できるようにする。
【解決手段】 送信手段が送信した電波の物体による反射波を受信する受信手段の受信強度をフーリエ変換し、その周波数成分の周波数を第1閾値と比較し、かつ前記周波数成分のパワースペクトルを第2閾値と比較する。自車の走行に対して支障がある停止した先行車からの反射波は受信強度が細かく増減するため、その受信強度をフーリエ変換した周波数成分は、周波数が第1閾値よりも大きく、かつパワースペクトルが第2閾値よりも大きくなることがあり、これにより先行車を判定することができる。この判定は自車から先行車までの距離が大きい状態でも可能であるため、障害物を早期に発見して回避操作を的確に行うことができる。
(もっと読む)
追尾装置
【課題】バイアス誤差推定精度を向上させた追尾装置を得る。
【解決手段】目標Tの動態データを取得する第1のセンサ11と、目標Tの距離、仰角および方位角を取得する第2のセンサ12と、動態データを第2のセンサ12の航跡出力時刻に時刻合わせを行う補正処理部40と、時刻合わせが行われた動態データと第2のセンサ12の航跡とを比較して一致度を出力する一致度判定処理部50と、一致度に基づき、バイアス誤差推定処理部70における予測処理で使用する予測ベクトル算出式を切替える運動モデル設定処理部60と、運動モデル設定処理部60の設定結果に基づき、カルマンフィルタによるバイアス誤差推定処理を行うバイアス誤差推定処理部70と、バイアス誤差ベクトル推定値を蓄積するバイアス誤差データベース80と、バイアス誤差ベクトル推定値を用いてバイアス誤差補正値を算出するバイアス誤差補正処理部90とを備える。
(もっと読む)
目標追尾装置および目標追尾方法
【課題】目標追尾情報のうちから一部を選定して出力する目標追尾装置について、新たに選定された目標追尾情報が出力された当初から信頼性が高い状態であって、さらには真に必要とされる目標追尾情報のみを選定して出力する目標追尾装置および目標追尾方法を提供する。
【解決手段】目標探知範囲に存在する全目標を捕捉する全目標捕捉部と、前記全目標捕捉部によって捕捉された全目標の追尾を常に行ってそれぞれの目標追尾情報を第1の目標追尾情報として出力する全目標追尾部と、前記全目標の中から指定された条件に合致する目標の目標追尾情報のみ前記全目標追尾部の出力から選定して出力するための前記条件が入力される条件入力部と、前記第1の目標追尾情報が入力され、前記条件入力部への入力によって選定された目標についてのみ第2の目標追尾情報として出力する出力情報選定部と、を備える。
(もっと読む)
レーダ装置
【課題】異る周波数変調率で変調された受信ビート信号のビート周波数を組合せて目標距離を算出するレーダで、異る目標の振幅値及び測角値が閾値以内では目標の正しい組合せができず、又複数目標のビート周波数差がビート周波数分解能以下では信号を分離できない。
【解決手段】アンビギュイティのない距離分解能と、ビート周波数分解能からのパラメータで選択した周波数変調率で複数のPRIに亘りチャープ状に周波数変調されたキャリア信号を放射、目標での反射信号を受信し、キャリア信号で変換した受信ビート信号にPRI間FFTを行い作成したPRI内距離−ビート周波数マップから、検出した目標候補同士を組合せ、目標候補のビート周波数の組合せからアンビギュイティのない距離及び速度を算出、アンビギュイティのない距離によりPRI内距離の距離アンビギュィティを解消し目標との距離を算出する。
(もっと読む)
センサを用いた追突事故防止装置
【課題】速度のみが検出可能な非接触式のミリ波センサの出力情報のみで、追突事故を防止するために運転手に警報を与えるシステムを比較的安価に提供する。
【解決手段】複数のミリ波センサにより、同一方向の目標物との相対速度が測定可能な構成となっていて、かつ各々のミリ波センサの検出範囲を異なるものとし、最も遠くから検出できるミリ波センサから順に判定用の速度閾値を小さくなるようにあらかじめ設定し、各々のミリ波センサで計測した速度がそれぞれ設定された閾値以上であるか判定し、閾値以上であった場合には追突する可能性があると判定するように構成した。
(もっと読む)
航行援助装置
【目的】
本発明は、船舶で航行中に危険物標や他船舶が自船予想針路上に出現または横断する可能性が発生した場合、ARPA(自動衝突予防援助装置)やAIS(自動船舶識別装置)などの装置を通じてレーダより得た危険物標の情報や他船の位置・針路ベクトルなどの情報を取り込み、予想針路との最接近距離と到達時間であるCPA・TCPAを計算し危険シンボルを表示する方法及び装置に関し、予想された針路が安全かどうかを知らせることを目的とする。
【構成】レーダ空中線部より得られた探知物標画像、及び自船情報と他船情報と予想針路情報を用いて演算部にて各予想針路位置におけるCPA・TCPAの演算を行ない、前記演算の結果からアラーム判定を行ない判定の結果に応じた危険シンボルを表示部へ画面表示させる。
(もっと読む)
レーダ受信信号処理装置とその方法
【課題】 同程度の周波数変化を持つ目標信号と不要信号が混在するレーダ受信信号から、目標信号のみを的確に検出する。
【解決手段】 レーダ受信信号を周波数領域に変換することで周波数スペクトルを取得し(ステップS11)、取得された周波数スペクトルをエコー群それぞれの密度関数の和(混合密度関数)でモデリングし(ステップS12)、混合密度関数のパラメータの最適値を学習することにより推定し(ステップS13)、推定したパラメータから目標信号の平均ドップラー周波数、スペクトル幅及び受信電力を算出し、観測結果として出力する(ステップS14)。
(もっと読む)
レーダ装置及びコンピュータプログラム
【課題】アンテナの指向性制御によらずに、検知した対象物が上方構造物であるか否か判別する。
【解決手段】電波を送信する送信アンテナ3と、送信された電波が対象物により反射された電波を受信する受信アンテナ1nと、受信された電波を所定の時間間隔で取得する受信波取得部7と、受信波取得部7の取得回数の関数として、受信された電波の電力を算出する受信電力算出部22と、関数から複数の代表点を抽出する代表点抽出部28と、代表点に基づいて対象物を前記受信アンテナの光軸より高い位置にある上方構造物であるか否か判定する判定処理部29と、を備える。
(もっと読む)
レーダ受信信号処理装置とその方法
【課題】 同程度の周波数変化を持つ目標信号と不要信号が混在するレーダ受信信号から、目標信号のみを的確に検出する。
【解決手段】 レーダ受信信号を周波数領域に変換することで周波数スペクトルを取得し(ステップS11)、取得された周波数スペクトルをエコー群それぞれの密度関数の和(混合密度関数)でモデリングし(ステップS12)、混合密度関数のパラメータの最適値を学習することにより推定し(ステップS13)、推定したパラメータから目標信号の平均ドップラー周波数、スペクトル幅及び受信電力を算出し、観測結果として出力する(ステップS14)。上記モデリングに際して、エコー群の周波数スペクトルを混合密度関数に当て嵌め、その当て嵌まり具合をペナルティ付きの尤度関数でもって評価するものとし、前記尤度関数のペナルティ項には、事前に測定した単独エコーの受信電力、ドップラー周波数、スペクトル幅の少なくともいずれかを用いる。
(もっと読む)
レーダ装置、路側器及び車載装置
【課題】探知波を反射した物体が特定の反射部材か否かを識別できるレーダ装置を提供する。
【解決手段】レーダ装置1は、第1の偏波面を持つ探知波を放射する送信アンテナ4と、探知波が物体によって反射された、第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナ(5−1)と、探知波が物体によって反射された、第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナ(5−2)と、第2の反射波の信号電力が第1の反射波の信号電力よりも大きい場合、第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材であると判定する判定部(9)とを有する。
(もっと読む)
信号処理装置、レーダ装置、車両制御システム、および、信号処理方法
【課題】連続性判定おいて検知点を適切に処理することを目的とする技術を提供する。
【解決手段】ピーク信号の組み合わせを誤ったペアリングで検出された可能性のある検知点を特定検知点とし、この特定検知点に特定された過去検知点と、他の過去検知点とで減算する減算値を変更する。これにより、過去検知点が特定検知点に特定された過去検知点か他の過去検知点かに応じてメモリからの削除のタイミングを調整できる。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】ARモデルの適切な次数設定と精度の良い方位推定により受信波の到来方向の検出を行う電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供する。
【解決手段】周波数分解処理部がビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、ビート周波数毎に分解されたビート信号に基づいた複素数データを算出する。方位検出部がビート信号に基づいて算出された複素数データを要素とする第1の次数の行列の固有値の値に基づいて正規方程式の次数を推定し、該推定された第2の次数の正規方程式を作成し、該作成された第2の次数の正規方程式に基づいて前記受信波の到来方向を算出する。
(もっと読む)
回転駆動装置および電波レンズアンテナ装置
【課題】 小型化と動作精度の向上との両立を図ることが可能な回転駆動装置および電波レンズアンテナ装置を提供すること。
【解決手段】 それぞれが出力端を有しており、かつ互いに独立に軸回転する外筒軸5および内筒軸4を備えており、外筒軸5の出力端の回転駆動力を駆動源として一対のルネベルグレンズ21を駆動するとともに、外筒軸5および内筒軸4の出力端の回転数差によって生じる回転駆動力によって一対のフィード22を駆動する
(もっと読む)
寝床看護システム
【課題】 寝返りの有無の検知、ベッドからの落下検知、又は無呼吸若しくは過呼吸の検知を、従来と比較して簡素なシステム構成で、従来よりも正確になし得る寝床看護システムの提供。
【解決手段】 照射波と反射波の位相差を検知するドップラーセンサー1と、タイマー2と、照射波と反射波の位相差及び時間から看護対象の動作時間、動作速度、及び看護対象の動作方向を導く検波部3と、看護対象の動作速度、及び看護対象の動作方向から看護対象の動作周期、及び動作量を導く演算手段4と、ドップラーセンサー1、検波部3、及び演算手段4から与えられた情報から看護対象の異常を検知して報知指令を出力する信号処理部5と、報知指令を受けてアラームを発する報知手段6を備え、信号処理部5は、呼吸検知手段7と、寝返り検知手段8と、落下検知手段9を備える寝床看護システム。
(もっと読む)
レーダ装置
【課題】
レーダ装置に割り当てられている周波数帯域が、他の通信システムで利用される受信装置におけるイメージ周波数に該当する場合であっても、与える干渉を低減する。
【解決手段】
レーダ装置は、予め定められた周期で複数の搬送波周波数それぞれのパルス信号を順に送信する送信部と、前記送信部から送信されたパルス信号が検出対象となる目標物により反射された反射信号を受信する受信部と、前記受信部により受信された前記反射信号を前記複数の搬送波周波数それぞれに対応する信号に分割する周波数分割部と、前記周波数分割部により分割された反射信号からなる時系列の信号を前記複数の搬送波周波数ごとに合成し、更に、位相合成された前記複数の搬送波周波数の信号を合成する信号合成部とを具備する。
(もっと読む)
レーダ装置
【課題】安定した相関追尾ができるレーダ装置を提供する。
【解決手段】FMCW方式のダウンスイープまたはアップスイープの信号を繰り返し送受信する送受信器20と、送受信器からの信号に基づく測角値を用いてビート周波数の空間を表すfbx−fby軸に座標変換するビート周波数軸変換部36と、ビート周波数軸変換部における変換によって得られたfbx−fby軸の空間において位置、速度および加速度を用いて相関追尾を行う相関追尾部37と、相関追尾部における相関追尾によって得られた結果をX−Y軸の位置および速度に変換するX−Y軸変換部38を備える。
(もっと読む)
レーダ装置、アンテナ制御方法、及びプログラム
【課題】アンテナ開口の方位の変更動作を行う際に、消費電力を抑えつつ、追尾を継続する。
【解決手段】アンテナ開口の方位の変更のために空中線部1−3を駆動させると、空中線部1−2のビーム走査範囲の端から空中線部1−3のビーム走査範囲の端までの範囲が、走査されない範囲となる。空中駆動部1−3を駆動させている間、空中駆動部1−3の駆動によって発生する走査されない範囲をカバーし、かつ空中駆動部1−2、1−3同士のビームの走査範囲が重複しないように、空中駆動部1−2、1−3のそれぞれのビームの走査範囲を逐次変更する。
(もっと読む)
レーダ装置
【課題】目標が予め分かっていない状態でも瞬時に受信電力が最大となる最適偏波が送信可能な偏波制御型のレーダ装置を得る。
【解決手段】レーダ装置は、異なる偏波状態を有する複数の信号が送信可能なアレーアンテナと、異なる偏波状態の信号をアレーアンテナに出力する2つの送信機と、異なる偏波状態の受信信号として出力する2つの受信機と、2つの受信信号それぞれに対して直交符号との相関に基づいて各偏波成分を分離する符号分離手段と、2つの受信機のいずれかを符号分離手段に接続する第2の切換手段と、各偏波成分を用いて受信電力が最大となる偏波状態を推定する偏波推定手段と、受信電力が最大となる偏波状態に基づいて送信機から送信される信号の偏波状態を制御する偏波制御手段と、を備え、前記アレーアンテナから同時に同一周波数の複数の信号が送信される。
(もっと読む)
201 - 220 / 1,238
[ Back to top ]