
Fターム[5J070AC06]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 速度 (1,297)
Fターム[5J070AC06]の下位に属するFターム
Fターム[5J070AC06]に分類される特許
141 - 160 / 1,238
レーダ装置及び目標探知方法
【課題】被探知目標を適正に探知する開口合成を可能とする。
【解決手段】目標を探知するレーダ装置において、空間位相が等しくなる2以上の基準パスを形成する2以上の送信アンテナと受信アンテナとの組合せを含む、2以上の送信アンテナ,及び2以上の受信アンテナと、各基準パスにおける受信アンテナで受信される受信信号の包絡線を取得する包絡線検波部と、各基準パスの受信信号の包絡線間の積分距離の最小値を与える遅延量から基準パス間の位相補正量を決定する決定部と、決定された位相補正量を用いて、2以上の受信アンテナで受信される全ての受信信号の位相を揃える補正部とを含む。
(もっと読む)
目標検出装置およびシステム

【課題】屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供し、監視領域内に侵入した複数の目標を高精度かつ高速に検出する。
【解決手段】センサ手段102−1〜102−mと送受信手段101の間の接続を、スイッチ手段103により時分割で切り替えることで、送受信手段101の部品点数を抑えた構成で広い測角範囲がカバーされる。また、2台の目標検出装置のみを用いて目標の定位を行う場合、2台の装置のそれぞれがカバーする角度範囲の両方に共通する領域の情報や、一方の装置から各目標を経由して他方の装置に至る総合伝搬距離情報を用いて、円の方程式の組み合わせの曖昧さに起因する誤検出を防止する。
(もっと読む)
アンテナ装置、レーダ装置、車載レーダシステム
【課題】単一の基板に形成されているにも拘わらず、180°を越えるような広い検知エリアをカバーできるアンテナ装置、そのアンテナ装置を利用したレーダ装置、車載レーダシステムを提供する。
【解決手段】アンテナ基板6の面方向を主放射方向とする平面放射用アンテナ部3と、アンテナ基板6の端方向を主照射方向とする水平放射用アンテナ部4とを、アンテナ基板6の異なるパターン形成層に形成する。これにより、両アンテナ部3,4を同一のパターン形成層に形成する場合と比較して、水平放射用アンテナ部4の指向性をより部品載置面6b側にシフトさせることができる。その結果、単一のアンテナ基板6でカバー可能な検知エリアを広角化(例えば、180°以上)することができる。
(もっと読む)
レーダ装置及び該レーダ装置における受信電力の算出方法
【課題】高分解機能処理を用いて電波の到来方向を推定する電子スキャン式レーダ装置において、複数物標に対して受信した各到来波の電力を正確に算出する。
【解決手段】所定の角度推定方式を用いて反射波の到来方向の推定を行う電子スキャンを利用した車載レーダ装置において、各アンテナの受信信号から算出した各角度に対するモードベクトルMV1,MV2を求め、受信信号RSのベクトルを当該モードベクトルMV1,MV2の方向に分解し、分解したベクトルPV1,PV2の長さを各物標から到来した反射波の受信電力とする方法である。この方法により、複数の物標があっても、複数の到来波の各電力を正確に算出でき、ペアリングが正確に行えて物標の検出精度が向上し、電子スキャンを利用した車載レーダ装置の誤動作が防止される。
(もっと読む)
レーダ装置
【課題】 物標との距離以外の情報が得られない検出エリアを含む複数の検出エリアにて物標検出を行うレーダ装置において、距離以外の情報が得られない検出エリアでも、移動物標であるか否かを速やかに判断できるようにする。
【解決手段】側方検出エリアで追跡中の物標が存在せず(S110:NO)、側方探査モードでの測定結果に基づき物標(側方検出物標)が検出された場合(S120:YES)、同時に、後方探査モードでの測定結果に基づき重複エリアで移動物標(重複エリア移動物標)が検出されていれば(S130:YES,S140:NO)、側方検出物標を側方検出エリアにて追跡の必要がある追跡対象物標として登録すると共に、その登録した追跡対象物標に、重複エリア移動物標の情報を引き継ぐ(S150)。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】目標の誤追尾を防止して、追尾精度を高めることができるようにする。
【解決手段】センサ1により特定されたプロットに対する類別処理を実施するプロット類別処理部2と、プロット類別処理部2から出力されたプロットの類別結果等を参照して、そのプロットの重心位置を追尾航跡の更新処理に使用するか否かを判定するプロット使用判定処理部3とを設け、追尾処理部4が、プロット使用判定処理部3によりプロットの重心位置を追尾航跡の更新処理に使用する旨の判定が行われた場合、そのプロットの重心位置を用いて追尾航跡を更新し、使用しない旨の判定が行われた場合、そのプロットの重心位置を用いずに追尾航跡を更新する。
(もっと読む)
車載用レーダ装置
【課題】車両中心軸と走査中心軸との軸ズレ補正処理に要する演算による通常の検出処理への影響を低減し、軸ズレ補正処理を高精度に実行可能な車載用レーダ装置を得る。
【解決手段】車両とターゲットとの距離、ターゲットに対する車両の相対速度、並びにターゲットの位置および方向の少なくとも1つをターゲット情報として検出する車載用レーダ装置1であって、車両の後進状態を検出する車両後進検出部11と、車両の後進距離を検出する後進距離検出部12と、車両の後進時に、車両の旋回情報および後進距離に基づいて、車両の実旋回角度を取得する旋回角度取得部13と、車両の後進時に、ターゲット情報に基づいて、車両の推定旋回角度を算出する旋回角度推定部14と、車両の後進時に、実旋回角度と推定旋回角度との差に基づいて、車両の車両中心軸と車載用レーダ装置1の走査中心軸との軸ズレを補正する軸ズレ補正処理部16とを備える。
(もっと読む)
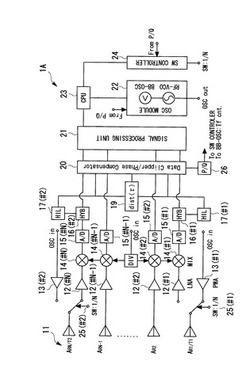
レーダ装置及び気象観測方法
【課題】 パルス繰返し時間内の送信ビームを同一周波数帯を用いて複数送信する場合であっても、送信ビーム間の干渉の影響を低減することが可能なレーダ装置及び気象観測方法を提供する。
【解決手段】 レーダ装置は、変調パルス生成部、デジタル−アナログ変換部、第1の周波数変換部、第1及び第2の送信モジュール及びアンテナユニットを具備する。変調パルス生成部は、第1及び第2の変調パルス信号を、同一タイミングで生成する。デジタル−アナログ変換部は、第1及び第2の変調パルス信号を第1及び第2のアナログ信号に変換する。第1の周波数変換部は、第1及び第2のアナログ信号の周波数を変換し、第1及び第2の送信パルス信号とする。第1及び第2の送信モジュールは、第1及び第2の送信ビームを形成するための処理を行う。アンテナユニットは、第1及び第2の送信パルス信号を第1及び第2の送信ビームで送信する第1及び第2のアンテナ素子を備える。
(もっと読む)
物標運動推定装置
【課題】自機の運動状態の変化を受けにくい運動推定結果を出力可能な物標運動推定装置を提供する。
【解決手段】レーダ装置が備える物標運動推定部6は、物標相対座標取得部61と、固定点基準物標座標取得部62と、フィルタ処理部64と、を備える。物標相対座標取得部61は、船舶に搭載され、自船を基準とした物標の相対位置を示す相対座標(Trx,Try)をレーダエコーに基づいて取得する。固定点基準物標座標取得部62は、相対座標(Trx,Try)と、自船の位置と、に基づき、固定点を基準とした物標の位置を示す固定点基準座標(Tax,Tay)を取得する。フィルタ処理部64は、固定点基準座標(Tax,Tay)を入力して物標の運動情報を推定する。
(もっと読む)
測定装置および測定方法
【課題】打撃物と被打撃物の両方の運動状態をより正確に測定することができるようにする。
【解決手段】ドップラセンサ11(ドップラセンサ11aまたは11bの一方)は、送信した第1の送信信号が打撃物に反射して戻ってきた第1のドップラ信号を受信する。マイクロホン14は、被打撃物が打撃物によって打撃された瞬間である打撃タイミングを検出する。制御部19は、検出された打撃タイミングから所定期間前の時刻までの第1のドップラ信号に基づいて、打撃物の速度を演算する。ストロボカメラ2の撮像部23は、演算された打撃物の速度に基づいて、被打撃物の運動状態を演算するために用いる、打撃直後の被打撃物を撮像する。本発明は、例えば、ゴルフにおける打撃物としてのゴルフクラブの速度と、被打撃物としてのゴルフボールの速度を測定する測定システムに適用できる。
(もっと読む)
周波数検出装置及び周波数検出方法
【課題】無線信号の搬送周波数の検出において瞬時的な雑音や不要波成分による誤検出を低減する。
【解決手段】周波数検出装置1は、パルス信号を送信する送信部6と、信号を受信する受信部9と、送信部6により送信され物体70で反射して受信部9により受信されたパルス信号を追跡することによりパルス信号の反射時間を検出する検出部11と、反射時間が所定範囲内であるか否かを判定し、反射時間が所定範囲内でない場合にパルス信号の搬送周波数を検出対象の搬送周波数と判定する判定部12を備える。
(もっと読む)
レーダ装置
【課題】
気象レーダ装置において、代表的なドップラ速度計算方式たるFFT法とPPP法は相反する性質を持つ。両手法を結合し、より精度の高いドップラ速度観測データを提供する。
【解決方法】
FFT法とPPP法によるドップラ速度並びに速度幅を同時に計算する。両手法によるドップラ速度の閾値に対する多寡を比較し、両者が共に閾値よりも大きい場合、有限項打ち切り誤差の影響による周波数分解能の劣化を受けないPPP法によるドップラ速度を採用する。一方、両手法によるドップラ速度の何れか一方が、前記閾値を下回る場合は、計算した速度幅の小さい方式によるドップラ速度計算結果を出力する。本手法により、より精度の高いドップラ速度観測データを提供する。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】移動体が雷雲などの進入禁止域を回避するために経路が変更される場合でも、移動体の将来位置などを高精度に推定することができるようにする。
【解決手段】進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出部14と、回避用加速度算出部14により算出された進入回避用の加速度と追尾処理部1により算出された状態ベクトルxkを用いて、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する回避経路特定部15とを設ける。
(もっと読む)
レーダ信号処理装置、レーダ装置およびレーダ信号処理方法
【課題】 例えば光波レーダにおいて、物体の動きが一様ではない場合でも、観測体積内の物体の偏光解消度を精度良く計測可能にすることを目的としている。
【解決手段】 レーダ信号処理装置において、算出した非偏光解消成分のスペクトルパラメータに基づいて偏光解消成分のスペクトルパラメータを算出し、このスペクトルパラメータの1つとしての受信光強度における非偏光解消成分に対する偏光解消成分の比である偏光解消度を算出するようにしたものである。
(もっと読む)
ドップラーレーダーシステム、ドップラーレーダー送信装置及び送信波最適化方法
【課題】本発明は、検出対象物体を容易にかつ精度よく検出するための相関処理に基づくドップラーレーダー送信装置を提供することを目的とする。
【解決手段】本発明は、ドップラーレーダー受信装置において自己相関が算出される検出対象物体からの反射波及び予め定められた参照波の周波数スペクトルが同一となるように、検出対象物体の移動速度のうち検出対象となる移動速度、自己の移動速度及びレーダー波の伝搬速度に基づいて、送信波の周波数スペクトルを調整する可変周波数発振部414及び読み出しアドレス生成部415と、送信波を検出対象物体に照射する送信波照射部と、を備えることを特徴とするドップラーレーダー送信装置である。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】取得するチャンネル数を増やすことなく、方位推定精度を高めた方位検出ができる。
【解決手段】周波数分解処理部がビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、ビート周波数毎に分解されたビート信号に基づいた複素数データに基づいてデータ数を拡張した拡張複素数データを生成する。方位検出部が、ビート信号に基づいて算出された複素数データである元の複素数データに基づいて前記受信波の到来方向を算出する。その方位検出部において、データ拡張部が、元の複素数データに基づいてデータ数を拡張した拡張複素数データを生成する。また、第1演算処理部が、拡張複素数データに基づいて受信波の到来方向を算出する。
(もっと読む)
推定装置及びコンピュータプログラム及び推定方法
【課題】処理時間を低減しつつ目標航跡を精度良く抽出する。
【解決手段】航跡候補生成部140は、目標航跡を記述するパラメータのうちいくつかを固定した上でパラメータの候補を多数生成する。相関ゲート設定部150は、航跡候補生成部140が生成したパラメータ候補におけるいくつかの固定されたパラメータと目標の真のパラメータとの誤差を最大限考慮した相関ゲートを設定する。概探索部160は、航跡候補生成部140が生成したパラメータ候補と、観測データ管理部130が取り出した観測データとから、相関ゲート設定部150が設定した相関ゲートを用いてパラメータ候補の尤度を計算し、尤度が最大となるパラメータ候補を抽出する。詳細探索部170は、概探索部160が抽出したパラメータ候補を初期値として、尤度が大きくなる方向にパラメータを更新し、相関ゲートが小さくなるように更新して、尤度が最大となるパラメータを探索する。
(もっと読む)
制御装置、レーダ検知システム、レーダ検知方法
【課題】レーダから出力された検知結果によって異常を監視し、レーダの性能の低下を検知する。
【解決手段】取得部1aは、レーダ2から出力された信号に基づき、車道を走行した複数台の走行車両のそれぞれについて、検知開始位置および検知終了位置の座標を取得する。算出部1bは、検知開始位置の座標の平均値および検知終了位置の座標の平均値を算出し、算出結果を有する検知状況情報を検知状況情報記憶部1eに記憶させる。比較部1cは、検知状況情報が示す検知開始位置の座標の平均値および検知終了位置の座標の平均値とそれぞれの所定の基準値とを比較する。異常判定部1dは、比較部1cによる比較結果に基づいて、レーダ2の異常の発生の有無を判定し、異常が発生したと判定した場合には異常の発生を示す情報を出力する。
(もっと読む)
レーダ装置
【課題】空間平均された共分散行列を小規模な構成でかつ高速に算出することができるレーダ装置を得る。
【解決手段】レーダ装置の平均共分散行列算出手段12は、複素ベクトルVを保持する複素データレジスタ20と、複素ベクトルVの要素から複素スペクトラム成分ViとVjを逐次選択する複素データセレクタ21と、ViとVj*との複素乗算値Wijを逐次算出する複素乗算器22と、Wijを逐次遅延させてWij0〜Wij−2τを逐次出力する多段シフトレジスタ23と、Wij0〜Wij−2τの複素加算を行って空間平均された共分散行列Sの各要素Sklを逐次算出する複素加算器24手段とを備え、複素スペクトラム成分V0〜V5から共分散行列Wの各要素Wijを逐次算出しつつ、算出した各要素Wijから空間平均された共分散行列Sの各要素Sklを逐次算出するパイプライン構成を有している。
(もっと読む)
速度計測装置
【課題】路面に対する移動体の速度を正確に計測する。
【解決手段】速度計測装置は、路面形状データを取得する路面形状センサ11と、路面形状データを格納するメモリ12と、メモリ12に格納された路面形状データに基づいて、車両10の速度を計算する演算装置13とを備える。路面形状センサ11は、路面に電波を放射し、路面形状センサ11からの距離が異なる路面上の複数の構造物によって反射された各反射波の信号レベルと、路面形状センサ11から各構造物までの伝搬距離とを測定することで、路面形状データを取得する。演算装置13は、各路面形状データの伝搬距離を、路面に射影した水平距離に変換し、類似する路面形状データが取得されるときの路面形状データとの水平距離の差を決定し、水平距離の差を測定時間の差で除算して移動体の速度を計算する。
(もっと読む)
141 - 160 / 1,238
[ Back to top ]