
Fターム[5J070AC11]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354)
Fターム[5J070AC11]の下位に属するFターム
Fターム[5J070AC11]に分類される特許
81 - 100 / 362
携帯型無線周波数識別(RFID)読取り機
ある特定の携帯型無線周波数識別(RFID)読取り機は、RFID装置からRFID信号を受信するための複数のアンテナ要素を含む能動型アンテナアレイを含む。アンテナ要素は、能動型アンテナアレイにより生成されるビームパターンを制御するための制御回路を含む。携帯型RFID読取り機は、和回路と差回路とをさらに含む。和回路は、複数のアンテナ要素のうちの少なくとも2つにより受信されるRFID信号を合計することにより和信号を決定するよう動作可能である。差回路は、複数のアンテナ要素のうちの少なくとも2つにより受信されるRFID信号同士の差信号を決定するよう動作可能である。携帯型RFID読取り機はまた、ビームパターンを電子的に誘導して、RFID読取り機からある特定のRFID装置への方向を特定するためのコントローラを含む。 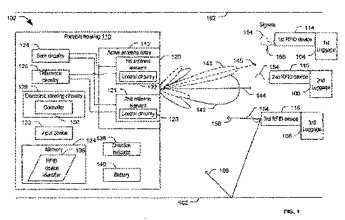 (もっと読む)
(もっと読む)
レーダ情報処理システム及びレーダ情報処理方法
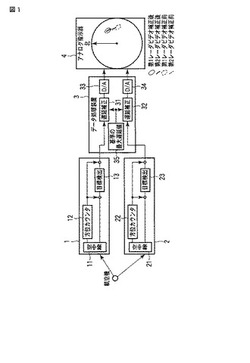
【課題】複数のレーダ装置の受信信号から検出された目標に関する情報を正確に同期表示させること。
【解決手段】第1レーダ装置1及び第2レーダ装置2は、空中線11、21を同一周期で回転させてレーダパルスを送受信して、目標検出部13、23により目標を検出する。データ処理装置3は、第1レーダ装置1及び第2レーダ装置2により検出された複数の目標情報を同期させて出力する。第1レーダ装置1及び第2レーダ装置2は、目標検出処理前後の方位値を目標情報に付加してデータ処理装置3に出力し、データ処理装置3は、目標検出処理前後の方位値をもとに複数の目標情報を基準値に合わせて遅延させる。
(もっと読む)
信号処理装置、レーダ装置、物体検出システム、信号処理方法、および、プログラム

【課題】移動物データのミスペアリングを検出するできる技術を提供する。
【解決手段】新規に検出された移動物データを中心とした所定の判定エリア範囲内に物体データが存在する場合は、その新規に検出された移動物データはミスペアリングによる誤った物体データとして、再度ペアリングを行う。これにより少ない判定対象で早期にミスペアリング判定を行い、誤った車両制御を防止し、車両のユーザーの安全を確保できる。
(もっと読む)
到来方向推定装置及び方法
【課題】低処理負荷による高精度な到来信号の到来方向推定技術を提供する。
【解決手段】到来方向推定装置は、複数のセンサ素子により受信された各受信信号から得られるベースバンド信号ベクトルの相関ベクトルを用いることにより空間平均が適用された共分散行列を示す一般化HANKEL行列Rを生成する第1行列生成部と、一般化HANKEL行列Rの部分行列R1及びR2を用いて線形演算することにより雑音部分空間への射影行列としての性質を有する核行列Ω1を生成し、この核行列Ω1と直交する核行列Ω2
を生成する第2行列生成部と、核行列Ω1及びΩ2のいずれか一方を分子に他方を分母に用いて定義された角度スペクトラム、又は、核行列Ω1及びΩ2を用いた代数方程式から信号の到来方向を推定する推定部と、を備える。
(もっと読む)
物体検出システム
【課題】レーダー及び立体視センサーを含む物体検出システムを提供する。
【解決手段】物体検出システムは、レーダー信号が送信される少なくとも一つの開口及び反射したレーダー信号が受信される少なくとも一つの開口を備えるレーダーシステムを含む。検出システムは、第1のセンサー及び第2のセンサーを含む立体視システムも含む。第1のセンサー及び第2のセンサーは、オフセットにより分離される。立体視システムは、単一のアセンブリを形成するためにレーダーシステムに取り付けられる。レーダーシステムは、第1のセンサーと第2のセンサーとの間のオフセット内に設置される。
(もっと読む)
信号処理装置、レーダ装置、車両制御システム、信号処理方法、および、プログラム
【課題】物体情報を正確に検出できるレーダ装置を提供する。
【解決手段】過去の物体検出処理において検出された物体情報の周波数を整数倍した周波数に基づいて、所定周波数範囲を設定して、アップ区間とダウン区間のそれぞれでピーク信号が所定周波数範囲内にある場合に、ピーク信号を特定ピーク信号として設定する。そして、アップ区間とダウン区間との特定ピーク信号同士をペアリングする。これにより、物体情報を正確に検出できる。
(もっと読む)
信号処理装置、レーダ装置、車両制御システム、信号処理方法、および、プログラム
【課題】物体情報を正確に検出できるレーダ装置を提供する。
【解決手段】連続する複数回の物体検出処理において、同一の物体に係る物体情報が連続的に検出されるかを判定する。過去の物体検出処理において検出された物体情報に基づいて、この物体情報の略整数倍の物体情報を有する特定物体情報を検出し、特定物体情報が検出された場合には、特定物体情報の物体情報を整数で除算した物体情報を有する予測物体情報を仮想的に設定する。そして、物体情報の設定は直近の物体検出処理において検出される物体情報と、前記予測物体情報とのいずれも判定対象とする。これにより、物体情報を正確に検出できる。
(もっと読む)
レーダ装置
【課題】ビーム軸調整をするときに平面アンテナが傾動不能な状態になることを回避する。
【解決手段】
筐体に対し傾動可能に設けられる平面アンテナと、前記筐体が車両に固定された状態で前記平面アンテナの重力方向に対するアンテナ角度を検出する手段と、前記アンテナ角度が基準アンテナ角度になるように、前記アンテナを傾動させるアンテナ傾動部と、前記平面アンテナの傾動角度の履歴と、前記平面アンテナの傾動可能範囲とを記憶する記憶部とを有するレーダ装置において、前記アンテナ傾動部は、前記アンテナ角度が前記基準アンテナ角度になるように傾動させる際の傾動予定角度と前記傾動角度の履歴の和が前記傾動可能範囲を超えるときには前記平面アンテナを傾動させないので、ビーム軸調整をするときに平面アンテナが傾動不能な状態になることを回避することができる。
(もっと読む)
車載レーダシステム
【課題】複数のレーダ装置の各物標検知軸を軸調整する際、各レーダ装置の軸調整を容易かつ速やかに行うことができ、各軸調整によって物標の検知精度を高めることができる車載レーダシステムの提供。
【解決手段】第1および第2レーダ装置と、路側物の捕捉点の軌跡ベクトルを算出する軌跡ベクトル算出手段と、自車が直進中であることを検知する走行状態検知手段と、自車が直進中であることが検知された場合、第1レーダ装置における所定の検知方向と路側物の捕捉点の軌跡ベクトルとがなす対路側角度を検知する第1の角度検知手段と、自車が直進中であることが検知された場合、第2レーダ装置における所定の検知方向と路側物の捕捉点の軌跡ベクトルとがなす対路側角度を検知する第2の角度検知手段と、第1の角度検知手段で検知された対路側角度と第2の角度検知手段で検知された対路側角度の差分値を算出する差分角度算出手段とを備える。
(もっと読む)
二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法
【課題】マルチパスの影響を受けても、実際に飛行している目標対象物の検出を確実に行い得る二次監視レーダ装置を提供する。
【解決手段】制御装置16において、まずオールコールによりレーダ地上局がカバーする監視領域を走査して得られた目標位置情報をアドレスとともにメモリ17に記憶しておき、オールコールによる走査の実行後に、レーダ地上局がカバーする監視領域の全方位(アジマス方向)において、SLO走査を実行し、SLO走査で応答信号を返送した目標のアドレスと、メモリ17に登録されロールコールに移行した目標のアドレスとが一致し、目標位置に所定値以上の差があるか否かを判定し、アドレスが一致し所定値以上の差がある場合に、SLO質問に対し返送された応答信号をリアル応答として検出するようにしている。
(もっと読む)
モードSを有する二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法
【課題】モードSによる運用を継続しながら、マルチパスの影響で発生するゴースト機のアジマス領域の測定を行い得るモードSを有する二次監視レーダ装置を提供する。
【解決手段】制御装置16において、モードSレーダ地上局がカバーする監視領域の少なくとも一部に対し、MIIP質問を行うことでモードSによるオールコール質問を行いつつゴーストターゲットやリアル機からモードA/Cによる応答信号を返送させ、モードAアドレスが重複して検出される方位の分布を測定するようにしている。
(もっと読む)
自動車用衝突モニタ方法および装置
本発明は、所定の周辺領域がモニタリングされる、自動車用衝突モニタ方法に関するものである。本方法は、前記周辺領域内に存在する少なくとも1つの物体の位置データおよび運動方向データを提供するステップ(S1、S5)と、車両構成部品の少なくとも1つの位置およびドライバーの所望の走行方向の少なくともいずれかを与える車両情報を提供するステップ(S2)と、前記車両情報に基づいて物体が自動車に対して衝突危険を与えないことが決定された場合、該物体を識別するステップ(S4)と、位置データおよび運動方向データに基づいて識別されない物体の自動車への接近が検出されたとき、衝突危険を警報するステップ(S8)とを含む。 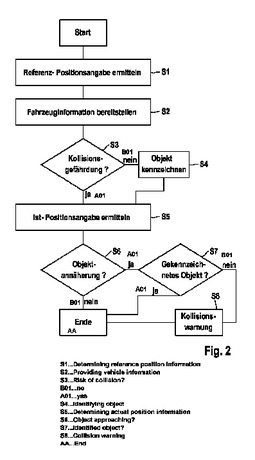 (もっと読む)
(もっと読む)
レーダ装置
【課題】ホログラフィック合成法によりターゲット検出を行うレーダ装置において、受信信号の強度低下による影響を可及的に回避し、より正確なターゲット検出を行う。
【解決手段】複数の送信波のそれぞれに対応した、ホログラフィック合成される複数の対応受信波のうち少なくとも第一対応受信波と第二対応受信波について、該第一対応受信波の受信を行った前記複数の受信アンテナのうち少なくとも二つ以上の所定数の受信アンテナと該第二対応受信波の受信を行った前記複数の受信アンテナのうち前記所定数と同数の受信アンテナを、合成のための合成基準アンテナと定める。そして、該第一対応受信波の該所定数の合成基準アンテナと該第二対応受信波の該所定数の合成基準アンテナとの間に形成される、対応受信波の位相合成が可能な合成基準アンテナ同士の該所定数の合成基準アンテナ対のうち少なくとも一つの合成基準アンテナ対を設ける。
(もっと読む)
物体検出装置、情報処理方法、および、情報処理システム
【課題】カメラで撮影した画像内の物体の種類を判定する場合の電子制御装置の処理負荷を軽減する技術を提供する。
【解決手段】レーダ装置により検出したレーダ情報に基づいて、物体の種類を予測する。その予測した物体の種類をもとにカメラで撮影した1フレームの画像の所定の画像範囲を切り出して、電子制御装置により物体の種類判定を行う。これにより電子処理装置の画像による物体の種類判定の処理負荷が軽減される。
(もっと読む)
半導体装置、無線タグおよび方向判定方法
【課題】自装置の向きを効率的に取得すること。
【解決手段】遮蔽部4は、入射する電磁波を遮蔽する。アンテナ2は、遮蔽部4の第1面側に設けられている。アンテナ3は、その第1面とは異なる遮蔽部4の第2面側に設けられている。方向判定部1aは、アンテナ2が電磁波を受信して出力される第1の信号と、アンテナ3が遮蔽部4を介した電磁波を受信して出力される第2の信号とに基づいて自装置の向きを判定し、判定結果を出力する。
(もっと読む)
モードSを有する二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法
【課題】ゴースト応答の判定の確実性を向上し得るモードSを有する二次監視レーダ装置を提供する。
【解決手段】複数のレーダ地上局による重複監視領域をSLO設定領域とし、制御装置16において、まずオールコールによりレーダ地上局がカバーする監視領域を走査して得られた目標情報をアドレスとともにメモリ17に記憶しておき、SLO設定領域に対しSLO走査と非SLO走査とを実行し、SLO走査と非SLO走査とにより応答信号を返送する目標のアドレスと、メモリ17に登録されロールコールに移行した目標のアドレスとが一致するか否かを判定し、一致する場合に、SLO質問に対し返送された応答信号をゴースト応答として検出するようにしている。
(もっと読む)
電波受信装置及び到来方向測定方法
【課題】レーダ波の到来方向を、精度良く、短時間で求めることができ、かつ小さなハードウェア規模を実現することが可能な電波受信装置及び到来方向測定方法を提供する。
【解決手段】まず、アンテナ11−2,11−3からの受信波に基づいて、粗測角処理器153で振幅モノパルス方式を利用して、レーダ波の到来方向を測定する。その後、アンテナ11−1,11−4からの受信波に基づいて、精測角処理器154でインターフェロメータ方式を利用すると共に、粗測角の結果を参照して、レーダ波の到来方向を測定する。
(もっと読む)
海洋表層の水質計測方法、水質計測装置及び水質計測プログラム
【課題】海洋レーダによって得られるデータを用いて海洋表層の塩分及び水温を計測することを可能にする。
【解決手段】基準時間帯の波浪が受信電力RSI0'に与える影響と計測時間帯の波浪が受信電力RSIm'に与える影響との変化分ΔS'を推算し、基準時間帯の波浪が受信電力RSI0'に与える影響と電気伝導度変動時間帯の波浪が受信電力に与える影響との変化分Δs'を推算し、電気伝導度変動時間帯の受信電力から変化分Δs'を差し引いた受信電力と電気伝導度変動時間帯の電気伝導度σとの間の関係の回帰関数f(σ)を推定し、RSI0'−RSIm'=ΔS'+{f(σ0)−f(σc)}(ただし、σ0:基準時間帯の電気伝導度)を用いて計測時間帯の電気伝導度σcの値を推算し、実用塩分を算出するようにした。
(もっと読む)
気象レーダシステムとその降水強度算出方法
【課題】これまでは不可能であった高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を同時に送信し、その反射波を受信する送受信装置(11〜16)と、前記送受信装置の受信出力から二重偏波観測を行って複数の観測パラメータを算出する信号処理装置(17)と、前記複数の観測パラメータのうち、低空間分解能であるが降水強度との相関が高い性質を持つ観測パラメータと空間分解能が高いが降水強度との相関が低い観測パラメータそれぞれに基づいて降水強度を総合判断するデータ変換装置(18)とを備え、低空間分解能であるが降水強度との相関が高い性質を持つ比偏波間位相差(KDP)と、空間分解能が高いが降水強度の絶対値との相関は低く、その地点付近の相対的な値となるレーダ反射因子(Z)とを組み合わせて総合的に降水強度(R)を算出する。
(もっと読む)
測角装置
【課題】モノパルス測角に加えて、ビーム内に到来する複数の目標信号を分離・測角する能力を有するとともに、高い測角性能と低コスト化を実現可能な測角装置を得る。
【解決手段】到来する目標信号をアンテナ1で受信した受信信号からΣおよびΔビームを形成する第1のΣ&Δビーム形成手段4と、受信信号およびΣビームからΣビームをガイディングセンサとするΣΣキュムラント行列を推定する第1のΣΣキュムラント行列推定手段5と、受信信号、ΣおよびΔビームからΣおよびΔビームをガイディングセンサとするΣΔキュムラント行列を推定する第1のΣΔキュムラント行列推定手段6と、ΣΣキュムラント行列およびΣΔキュムラント行列から目標信号の到来角に応じたモノパルス比を推定する第1のモノパルス比推定手段7と、モノパルス比をモノパルスディスクリパターン9に参照し、目標信号の到来角を測角するモノパルス測角手段8とを備える。
(もっと読む)
81 - 100 / 362
[ Back to top ]