
Fターム[5J070AC11]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354)
Fターム[5J070AC11]の下位に属するFターム
Fターム[5J070AC11]に分類される特許
101 - 120 / 362
電波発射源可視化装置
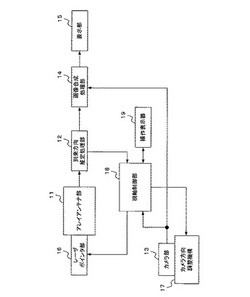
【課題】電波発射源可視化装置において、特に近距離の電波発射源をカメラ画像中から特定する際にも、良好な位置精度を維持できる電波発射源可視化装置を得る。
【解決手段】アレイアンテナ部11の中心軸に沿って前方にレーザ光を照射し、このレーザ光の照射された位置をカメラ画像の撮像視野の中心となるようにカメラ部13の撮像方向を調整して両者の軸合わせを行った後、電波到来方向を推定した2次元の波源画像とカメラ画像とを重ね合わせて、電波発射源可視化画像を得る。
(もっと読む)
レーダ装置、信号処理装置

【課題】
指向角度を間引いてレーダ信号を送出しても物標の角度検出精度の低下を防止する。
【解決手段】
アンテナが第1の方向に回動するときには、前記アンテナにより間欠的な第1の指向角度群でレーダ信号を送受信し、前記送受信されたレーダ信号の周波数差を有する第1のビート信号群を生成し、前記第1の方向と反対の第2の方向に回動するときには、前記アンテナにより前記第1の指向角度群とは異なる間欠的な第2の指向角度群でレーダ信号を送受信し、前記送受信されたレーダ信号の周波数差を有する第2のビート信号群を生成する。そして、前記第1のビート信号群の第1のピークと、前記第2のビート信号群の第2のピークとを検出し、前記第1のピーク形状における極大値と前記第2のピーク形状における極大値とに基づき、物標の角度を検出するので、物標の角度検出精度の低下を防止することができる。
(もっと読む)
測角装置、モノパルス測角装置、モノパルスレーダ、マルチスタティックレーダ
【課題】装置規模が小さくマルチパス波の干渉下でも所望波の到来角を正確に推定する測角装置を得る。
【解決手段】測角装置は、複数の到来波が混信入射する複数の受信アンテナ、上記受信アンテナそれぞれに接続された受信機を有する測角装置であって、各受信信号を周波数スペクトルに変換し、一つの上記受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の逆行列または擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定する。
(もっと読む)
レーダ装置並びにその表示制御方法及びプログラム
【課題】各レーダ系統からの複数の目標表示信号を表示画面上に一定の規則に従って表示させ、操作員による複数の輝線の監視を容易にし、目標の探知を見落とす危険性を低くし、かつ高速で移動する複数の目標の位置を誤差なくリアルタイムに表示させる。
【解決手段】各表示用信号201,…に含まれる目標の距離データは、距離データ変換回路109によって、基準表示領域における距離となるように変換される。各表示用信号201,…に含まれる目標の角度データは、角度データ変換回路109によって、基準表示領域における角度となるように変換される。そのため、各表示領域における各目標は、基準表示領域に瞬時に重ねて表示される。したがって、一つの基準表示領域にすべての目標が表示されるので操作員による監視が容易になるとともに、高速で移動する複数の目標の位置をリアルタイムに表示できる。
(もっと読む)
レーダ装置
【課題】高精度に目標を観測できるレーダ装置を提供する。
【解決手段】第1送受信兼用素子と第2送受信兼用素子とに分割された送受信兼用素子11aと、第1受信専用素子と第2受信専用素子に分割された受信専用素子12aを備えたアンテナ10と、観測角度範囲を複数に分割して、アンテナの各素子により、分割した角度範囲の各々を覆うように送信ビームを形成し、受信は、アンテナの各素子のビーム指向方向を第1送受信兼用素子と第2送受信兼用素子と同じ方向にして、第1送受信兼用素子と第1受信専用素子、第2送受信兼用素子と第2受信兼用素子により、ΣとΔの位相モノパルスビームを形成して複数の角度範囲の各々を覆い、第1送受信兼用素子、第2送受信兼用素子、第1受信専用素子および第2受信専用素子により、狭ビーム幅のビームを形成するビーム成形部34と、ビーム成形部で形成されたビームに基づきモノパルス測角を行う測角部37を備える。
(もっと読む)
目標追跡装置及び目標追跡方法
【課題】低SNR環境下においても目標を高精度に検出・追跡できるようにする。
【解決手段】目標追跡装置は、TBD(Track Before Detect)アルゴリズムを用いて受信信号から目標を検出する第1検出処理器6と、その検出結果をもとに目標を追跡する第1追跡処理器とを備える第1信号処理部4と、第1検出処理器6より高レートで受信信号から目標を検出する第2検出処理器10と、その検出結果をもとに目標を追跡する第2追跡処理器11とを備える第2信号処理部8と、第1検出処理器6で目標が検出されなかった場合は第1信号処理部4のみを実行させ、第1検出処理器6で目標が検出され、かつ第2検出処理器10で目標が検出されなかった場合は、第1信号処理部4と第2信号処理部8とを併用させ、第2検出処理10で目標が検出された場合は第2信号処理部8のみを実行させるように、受信信号の処理系統を判定する処理判定器3とを具備する。
(もっと読む)
レーダ装置
【課題】クロスレンジプロフィールを用いた類別判定において、目標の観測条件(距離、速度、進行方向)によってクロスレンジ分解能が変化することにより、類別判定結果の信頼性が大きく変化するという運用上の課題がある。
【解決手段】追尾情報から得られた目標の観測条件と、所望のクロスレンジ分解能から、所望のクロスレンジ分解能を得るために必要となる目標観測時間を算出し、これに基づき捜索ビーム及び類別ビームのビームスケジューリングを行う。
所望のクロスレンジ分解能を得るために更に長い目標観測時間が必要な場合は、類別ビームを分割送信することによりクロスレンジ分解能を向上させ、目標の観測条件によらずクロスレンジ分解能を一定にすることにより、類別判定結果の信頼性を一定に保つ。
(もっと読む)
レーダ装置
【課題】安定した相関追尾が可能なレーダ装置を提供する。
【解決手段】FMCW方式のスイープ信号を送受信する送受信器20と、送受信器からの信号に基づき算出された目標の速度によって該目標を速度範囲毎にグルーピングする速度グルーピング部36と、前記速度グルーピング部によってグルーピングされた速度グループ毎に相関追尾を行う相関追尾部37を備えている。
(もっと読む)
レーダ装置
【課題】近距離から遠距離までの広範囲で複数目標が存在する場合であっても、高い検知性能で、高精度に目標を観測できるレーダ装置を提供する。
【解決手段】FMCW変調されたスイープ信号を少なくとも2回送信する送受信器20と、送受信器からの送信に応答して受信されたスイープ信号を高速フーリエ変換するFFT部32と、FFT部でフーリエ変換することにより得られた信号に基づき、送受信器による2回のスイープの各々に対応するビート周波数を算出し、算出したビート周波数差と時間差とから速度を算出し、算出した速度とビート周波数とから距離を算出することにより、複数の目標の距離と速度を算出するMRAV処理部35を備える。
(もっと読む)
レーダー装置
【課題】より正確に障害物を検出可能とするレーダー装置を提供する。
【解決手段】電磁波を照射し、物体により反射された当該電磁波の反射波を受信して当該物体を検出するレーダー装置であって、電磁波を照射する照射手段と、電磁波の照射方向を示す照射軸線を上下方向へ揺動する照射方向揺動手段と、所定のタイミングにおいて、揺動手段を動作させて照射軸線の向きを水平方向以外の方向へ向ける照射方向制御手段とを備える、レーダー装置である。
(もっと読む)
偏波レーダ装置
【課題】 従来の偏波のレーダは偏波を時分割で切替えて送受信するため、偏波信号処理に必要な偏波データが揃うのに時間を要し、数フレームに一回しか処理結果が得られなかった。このため終末誘導時の誘導信号の出力レートが低く、機体の誘導精度が低下するという課題があった。
【解決手段】 終末誘導時には送信偏波(V送信)を固定し、受信した片偏波(例えばVV、HV)のビデオ信号から特徴量を抽出する。抽出した特徴量と、初中期誘導時にメモリしたビデオデータベースから偏波信号処理に必要な他の片偏波(HH、VH)のビデオ信号を推定し、受信したビデオ信号(VV、HV)と推定したビデオ信号(HH、VH)で偏波信号処理を実施する。これにより1フレームのビデオ信号から偏波信号処理が実施可能になるため、従来と比べて2倍の更新レートが得られ機体の誘導精度が向上する。
(もっと読む)
レーダ装置
【課題】ビート周波数を入力する追尾フィルタと、ペアリング後の観測値を入力とする追尾フィルタを併用して用いることで、アップチャープとダウンチャープ時のビート周波数のピーク数が異なる場合においても目標の追尾精度を向上することができ、誤ペアを除去することができるレーダ装置を得る。
【解決手段】FMCW信号を受信して、受信信号と送信信号とからビート信号のピークを検出し、ビート周波数の対応付け及び測角処理を実施して目標情報を生成する信号処理器1と、ビート周波数を入力して目標の位置と速度を更新するビート周波数追尾フィルタ2と、目標の位置と速度の観測値を入力して目標の位置と速度を更新するペア観測値用追尾フィルタ3と、前記両追尾フィルタの追尾航跡同士を統合もしくは選択する統合選択器4と、システム航跡メモリ5と、異常値判定器6とを設けた。
(もっと読む)
レーダ装置
【課題】対象の速度を正確に計測するレーダ装置を提供する。
【解決手段】電波を送信して、対象の距離、角度と相対速度を計測するレーダ装置において、レーダの正対方向の法線方向をXとするとき、対象の移動方向を判定する対象移動方向判定手段と、前記対象移動方向判定手段の判定結果に基づき、対象の速度を算出する対象速度算出手段を有し、前記対象速度算出手段は、前記対象移動方向判定手段により、対象がX方向に移動していると判定された場合には、対象のX方向速度を、
(V - Vs*cosθ)/sinθ(ただし、θはレーダ装置の正対方向に対する対象の角度、Vはレ
ーダで計測された相対速度、Vsは自車の速度)
で算出する。
(もっと読む)
モノパルスドップラレーダ装置
【課題】方位を含むターゲット検知データを短い周期で算出できるモノパルスドップラレーダ装置を提供する。
【解決手段】モノパルスドップラレーダ装置100は、A/D変換部126からI信号ディジタル値、Q信号ディジタル値を入力してターゲットの距離、相対速度及び方位を算出するディジタル演算処理部として、主演算処理部130と高速演算が可能な補助演算処理部140の2つを備える構成としている。補助演算処理部140では、演算量が多いプリサム処理、FFT処理、及びターゲット判定処理を行わせ、主演算処理部130では、方位算出処理を行わせている。また、主演算処理部130における方位算出処理は、ターゲット判定処理でターゲットが検出された距離ゲートおよび周波数ゲートに対してのみ行わせるようにすることで、方位算出処理で行う演算量を大幅に低減している。
(もっと読む)
ピルボックスタイプ多層平行板導波路アンテナ及び対応するアンテナシステム
本発明は、波を生成する給電部と、放射部と、波を給電部から放射部に誘導できるようにするガイド部とを備える多層アンテナ30に関する。ガイド部は、平行な平面を有する少なくとも2つの積み重ねられたガイド層と、隣接する層の対毎に、スロット結合手段と係合する反射部R1を含む、隣接する層間の移行手段とを備える。ガイド部が非平面反射部を備える少なくとも一対の隣接する層に関して、スロット結合手段は複数のスロット10を含む。各スロットは、少なくとも1つの軸に沿って延びる本体を含む。スロットは、少なくとも1つの行内に配置され、合わされてパターンを形成し、そのパターンは、反射部に沿って延び、反射部の形状に応じた形状を有する。 (もっと読む)
レーダ装置
【課題】目標角度を正確に計測することのできるレーダ装置を得る。
【解決手段】互いに異なる条件で観測した複数チャネルにおいて、それぞれ和信号と差信号とを観測する多チャネルモノパルス信号観測手段と、複数チャネルの信号にフィルタ処理を適用することにより、和信号および差信号に含まれる背景の不要信号をそれぞれ抑圧するフィルタ手段2a、2bと、フィルタ手段2a、2bにより背景の不要信号が抑圧された信号に対して閾値判定処理を適用し、目標の存在するレンジセルを検出する目標検出手段3と、目標検出手段3により検出された目標の存在するレンジセルにおいて、背景の不要信号を抑圧した和信号および差信号を用いたモノパルス測角処理を適用し、目標角度を計測する多チャネルモノパルス測角手段4と、を備えている。
(もっと読む)
検出装置
【課題】レーダによる物体検知範囲を広角範囲、または狭角範囲を切り替えて使用できるようにする。
【解決手段】アンテナ37−1は、電波を照射して送信信号を送信し、第1の間隔で1列ずつのアンテナが配置されたアンテナ51−2,51−3の対は、送信信号のうち、反射されてくる電波を受信し、第1の間隔よりも広い第2の間隔で、アンテナ51−1,51−2を1本のアンテナとし、アンテナ51−3,51−4を1本のアンテナとしたときのそれらの対は、送信信号のうち、反射されてくる電波を受信し、受信部12は、アンテナ51−2,51−3の対、または、アンテナ51−1,51−2とアンテナ51−3,51−4とをそれぞれ1本のアンテナとした対により受信された電波より受信信号を生成し、衝突予備動作用信号処理部13は、受信信号をサンプリングすることにより、物体を検出する。本発明は、車両安全装置に適用することができる。
(もっと読む)
レーダ装置
【課題】角度推定の精度やアンテナ感度を低下させることなく、ターゲットを検知可能な角度範囲を広くすることを課題とする。
【解決手段】アレーアンテナを有するレーダ装置1に、アンテナch1、ch2、ch6の何れかを送信アンテナとして電波を送信する送信部11と、アンテナch1−ch6を受信アンテナとして反射電波を受信する受信部12と、送信アンテナとして用いられるアンテナを、送信処理単位で切り替える制御部13と、を備え、アンテナch2−ch6は、隣接するアンテナに対して間隔dをおいて配置され、アンテナch1、ch2は、隣接するアンテナに対して間隔3/2dをおいて配置されることとした。
(もっと読む)
車載用モノパルス式レーダ装置
【課題】受信波に含まれる不要信号を除去して対象物を正しく検知することが可能な車載用モノパルス式レーダ装置を提供する。
【解決手段】車載用モノパルス式レーダ装置100は、通常行う対象物の検知とは別に、所定の時間間隔で不要信号の計測を行っており、測定された不要信号計測値を記憶部103に記憶している。そして、通常の対象物の検知の際には、記憶部103から不要信号計測値を読み出して不要信号補正値を算出し、これを受信信号から差し引くことで不要信号の影響を低減するように構成されている。本実施形態では、不要信号に送信信号12の反射波も含めて計測されるのを防止するために、不要信号を計測するときには送信部110を停止させて受信部120側だけを動作させるようにしている。これにより、不要信号のみを計測して記憶部103に記憶させておくことができる。
(もっと読む)
レーダ装置
【課題】レーダビームの上下方向の軸ずれ量を算出することができるレーダ装置を提供する。
【解決手段】レーダ装置1は、レーダ3と、このレーダ3が接続されたECU2とを備えている。ECU2は、レーダ3によって検出された自車両の上方又は下方の正面に存在する物標の中から静止構造物を検出する。そして、ECU2は、検出された静止構造物Tの自車両Mに対する相対的な移動方向と自車両の進行方向とが成す上下方向の角度に基づいて、自車両の上下方向に対するレーダビームのずれ角Δθ(軸ずれ量)を算出する。
(もっと読む)
101 - 120 / 362
[ Back to top ]