
Fターム[5J070AC11]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354)
Fターム[5J070AC11]の下位に属するFターム
Fターム[5J070AC11]に分類される特許
121 - 140 / 362
誘導装置
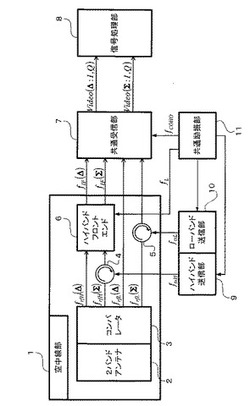
【課題】複数のバンドの周波数の電波を送出することにより小RCS目標の対処性能を向上させる際に、送受信機の大型化を抑えて飛しょう体への搭載が可能な誘導装置を提供する。
【解決手段】誘導装置は、局発信号及びIF信号を励振するとともに局発信号の周波数にIF信号の周波数を加算して得た周波数のハイバンド送信信号とIF信号の周波数と同じ周波数のローバンド送信信号とを生成する共通励振部と、目標で反射して戻ったハイバンド送信信号を受信して得たハイバンド受信信号を局発信号によりダウンコンバートするハイバンドフロントエンドと、ハイバンドフロントエンドから出力されたダウンコンバートされたハイバンド受信信号と目標で反射して戻ったローバンド送信信号を受信して得たローバンド受信信号とが入力される共通受信部と、を備えた。
(もっと読む)
目標追尾装置

【課題】複数のn次元角度センサと目標との交会角が小さな場合でも、追尾安定性を向上させた目標追尾装置を得る。
【解決手段】目標の追尾維持処理開始時の初期値算出にあたって、目標との仮説距離を用いた第1の追尾維持処理と、交会法により算出された距離を用いた第2の追尾維持処理とを並行して動作させ、それぞれの処理で目標航跡を取得しながら、それぞれの目標航跡に対する事後確率を算出し、この事後確率に基づいて2つの目標航跡を選択/統合した統合航跡を継続取得することによって目標の追尾を維持する。
(もっと読む)
物体検知装置
【課題】 受信レベルが異なる二つのターゲットが並走しているとき、受信レベルが低い方のターゲットがゴーストターゲットであると誤判定されるのを防止する。
【解決手段】 ゴーストターゲット候補判定手段M5は、二つのターゲットの自車からの距離が同等であって受信レベル差が所定値以上の場合に、一方のターゲットが他方のターゲットのゴーストターゲット候補であると判定し、並走ターゲット判定手段M6は、二つのターゲットの自車からの距離変化に応じた角度差および左右位置差の変化に基づき、一方のターゲットが他方のターゲットの並走ターゲットであると判定し、ゴーストターゲット判定手段M7は、ゴーストターゲット候補のうちから並走ターゲットデータを削除したものをゴーストターゲットであると判定するので、ゴーストターゲットを精度良く判定しながら、並走ターゲットをゴーストターゲットと誤認するのを未然に防止することができる。
(もっと読む)
レーダ装置
【課題】レーダビームの上下左右方向の軸ずれ量を算出することができるレーダ装置を提供する。
【解決手段】レーダ装置1は、レーダ2と、このレーダ2と接続されたECU3とを備えている。ECU3は、レーダ2によって検出されたデータに基づいて、自車両と同一のレーンの直線路において前方正面を走行する先行車両を抽出する。そして、ECU3は、その先行車両について自車両に対する先行車両の距離及び上下左右方向がレーダ2によって所定回数検出された場合に、その所定回数検出されたデータに基づいてレーダビームの上下左右方向の角度ずれ量Δθx,Δθy(軸ずれ量)を算出する。
(もっと読む)
車載レーダ装置、及びターゲット認識方法
【課題】対向車からのレーダを直接受信するような強い干渉電波が生じる場合においても、干渉波の影響を最小限に抑えて、正確な測距や測角ができるレーダ装置を提供する。
【解決手段】レーダ装置の送受信部100は、アンテナ素子101と、アンテナ素子101に対する信号の位相又は振幅の少なくとも一方を調整するウエイト調整部102と、加算部103とを備え、制御部104は、アンテナ部におけるレーダの送信又は受信を切り替える送受信制御部104cと、アンテナ部が受信した干渉波を検出する干渉波検出部104aと、干渉波検出部104aにおいて干渉波が検出された場合には、ウエイト調整部102を制御してアンテナ部における指向性のヌル点の方向を調整するヌル方向制御部104bとを備える。
(もっと読む)
レーダ信号処理装置とその目標判定方法
【課題】低S/N環境下においても目標を識別し距離や速度を特定することができるようにする。
【解決手段】目標11からの反射波はアンテナ1から取り込まれ、受信器2で受信される。受信された信号はA/D変換器3でデジタル信号に変換されて目標検出器4で信号処理されて、目標航跡の仮データが求められる。目標検出器4では、デジタル信号に変換された信号をフーリエ変換し、複数回分取り込んで、ハフ変換やTBDアルゴリズムなどの方法によって目標と思われる航跡を抽出し、これを目標航跡仮データとする。この目標航跡仮データは、観測毎の距離のデータ列および速度のデータ列であり、目標判定処理器5に送られる。この目標判定処理器5は、観測毎に得られる目標航跡仮データから目標の航跡を判定し、単一の目標と判定されたときはこの目標の航跡情報とすることで、真の目標航跡データを求める。
(もっと読む)
到来波検出装置および到来波検出方法
【課題】マルチスタティックレーダ受信機における計算処理量を削減する。
【解決手段】周波数帯の異なる複数のチャンネルから複数の電波を受信するRF処理部3と、前記複数の電波をそれぞれ同一の低周波数帯へ周波数変換する周波数変換部5−1、5−2、5−3と、前記周波数変換された複数の電波を加算して加算信号を得る加算部6と、前記加算信号の相関行列の固有値解析を用いて、到来波検出を行う推定部7とを備える到来波検出装置。
(もっと読む)
情報処理装置、情報入手装置、情報統合装置、制御装置および物体検出装置
【課題】 情報処理装置の設計変更を容易にし、かつ汎用性を向上させる。
【解決手段】 車載される情報処理装置1において、車両周囲の被検知空間を区切った区画である複数のピクセルが設定されている。1台以上のセンサ部11は、被検知空間内の状況に関する検知情報DSを取得する。パラメータ変換部12は、センサ部11毎に、検知情報DSに基づいて、各ピクセル内の物体に関する第1パラメータを求めて各ピクセルに付与する。パラメータ統合部15は、ピクセル毎に、ピクセルに付与された第1パラメータを統合し、統合結果である第2パラメータを該ピクセルに付与する。処理実行部25は、全ピクセルの第2パラメータから成る統合情報MD2、または該統合情報MD2に基づく制御用情報DCを用いて、車両の制御に係る適応業務処理を行う。これによって、センサ部11の組合せに関わらず、情報統合のための処理が共通化される。
(もっと読む)
姿勢計算装置及び誘導装置及び姿勢計算装置の姿勢計算方法及び姿勢計算装置の姿勢計算プログラム
【課題】目標物周辺の地面の傾斜を正確に検出することができ、斜面に設定された目標物に対して予め想定された姿勢角で正確に到達することのできるように計算する姿勢計算装置を提供する。
【解決手段】目標座標取得部121が目標の2次元の位置座標である目標座標20を取得し、DEMデータベース122が所定の領域内における複数の点の標高情報を含む3次元位置座標を記憶し、傾斜算出部123がDEMデータベース122に記憶された3次元位置座標の中から、目標座標取得部121により取得された目標座標近傍の複数の3次元位置座標を目標周辺DEMデータ21として取得し、傾斜算出部123が複数の目標周辺DEMデータ21に基づいて、目標の周囲の領域の傾斜角22を処理装置により算出し、姿勢角計算部124が傾斜算出部123により算出された傾斜角22に基づいて、飛翔体の目標に対する姿勢を制御するための飛翔体の姿勢角23を計算する。
(もっと読む)
障害物検知システム及び車両装置
【課題】障害物に接触することなく車両本体と開閉ドアとの間の障害物を確実に検知すること。
【解決手段】開閉ドア側の第1の位置にレーダー装置20又はトランスポンダTの一方が設けられ、車両本体側の第2の位置にトランスポンダT又はレーダー装置20の他方が設けられている。送信回路21は所定の周波数の送信信号を無線送信し、トランスポンダTの送受信回路は無線送信された送信信号を受けて、同一周波数かつ同一位相の返信信号を送り返す。受信回路21は返信信号を受信し、測定部22は送信信号及び返信信号の位相情報から距離情報を測定する。メモリ23には開閉ドアが全開状態でのトランスポンダTとレーダー装置20との距離に対応した距離情報が格納され、障害物検知部24は、測定部22が測定した距離情報とメモリ23に格納された距離情報とを比較して、これら距離情報が不一致の場合には障害物有りと判定する。
(もっと読む)
自動車において観測対象物体を検出する方法
【課題】 観測対象物体とノイズ、固定観測対象物体と移動観測対象物体、および互いに近接し合った観測対象物体同士を容易に区別することができる、自動車における観測対象物体を検出する方法を提供する。
【解決手段】 この方法は、与えられたサイクル数にわたって、自動車の移動量に基づいて、自動車と相対的な、少なくとも1つの観測対象点の位置を補正するステップと、少なくとも1つの観測対象点から開始して、第1の与えられた特性を満たす、隣接する観測対象点とともに一次グループを形成するステップと、第2の与えられた特性に基づいて、一次グループが同質的であるか否かを検証するステップと、与えられたサイクル数にわたって、自動車と相対的に、単一の観測対象物体に対応して構成されていると判断されるグループの位置を計算するステップとを含んでいる。
(もっと読む)
無線測位装置、無線測位システム、及び無線測位方法
【課題】異なる位置に存在する複数の無線端末の測位を行う場合に、短時間でゲインを制御できる無線測位装置、無線測位システム、及び無線測位方法を提供すること。
【解決手段】基地局100において、ゲイン制御部109が、予め用意されている対応テーブルに基づいて、経過時間に応じて、増幅部111に対する設定電圧を設定する。これにより、フィードバック制御を行うことなく増幅部111のゲインを調整できるので、短時間でゲインを制御できる。また、増幅部111のゲインは、経過時間が大きくなる程、大きく設定される。これにより、送信元の測位対象無線端末200が遠くにあり、応答パルス信号の受信電力が小さい程、その応答パルス信号を大きな利得で増幅できる。従って、測位対象無線端末200が複数の場合でも、応答パルス信号のレベル調整を適切且つ短時間で行うことができる。
(もっと読む)
測角処理装置
【課題】レドームの影響等を受けつつ広角方向から到来する信号を測角対象範囲外として除去するとともに、測角対象範囲内の到来信号に対して良好な測角結果を得る。
【解決手段】インターフェロメータ方式を用いた測角処理装置において、レドームが装着された空中線本体の複数のアンテナ素子で受信した受信信号の受信振幅をそれぞれに取得し、これら受信振幅相互間の最大振幅差を算出する。そして、この最大振幅差を、あらかじめ設定されたしきい値と比較し、しきい値を超えない受信信号に対しては、レドームによる影響等の少ない正面方向寄りの角度範囲からの到来信号としてインターフェロメータ方式による測角を行うとともに、しきい値を超えた受信信号は、レドームによる影響等の大きい広角方向寄りの角度範囲から到来したものとして棄却する。
(もっと読む)
検出装置および方法、並びにプログラム
【課題】ランダムに検出される検出位置情報に基づいて、正確に物体の進行方向および速度を検出できるようにする。
【解決手段】検出位置特定部81は、検出された物体の検出位置における速度、距離、および角度に基づいて、物体の相対的な検出位置を特定し、含有数カウント部86は、物体の相対的な検出位置を時刻に対応付けて、水平方向の検出位置を示す軸と進行方向の検出位置までの距離を示す軸とで設定される2次元の平面上にプロットし、物体の進行方向の先頭部分が所定時間内に通過すると予想される平面上の形状からなるフレームを所定の回転角度で回転させながら、回転角度毎にフレーム内に含まれるプロットされた検出位置の数をカウントし、方向決定部87は、カウントされたプロット数が最大となるフレームの回転角度に基づいて、物体の存在する存在位置、および進行方向を決定する。本発明は、車両安全装置に適用することができる。
(もっと読む)
信号波到来角度測定装置
【課題】ESPRIT測角処理における誤った測角結果を排除できる信号波到来角度測定装置を提供する。
【解決手段】観測対象の信号波を電気信号に変換するセンサ群2で変換された電気信号から信号波の角度測定に必要な観測データベクトルを生成する観測データベクトル生成部3と、観測データベクトル生成部3により生成される観測データベクトルから信号波の到来角度を算出するESPRIT測角処理部4と、ESPRIT測角処理部4におけるESPRIT測角処理の測角処理過程データから到来する信号波の到来角度以外の情報を推定する到来信号波推定部5と、到来信号波推定部5の推定結果に基づいてESPRIT測角処理部が算出する到来角度の測角結果の正誤を判断して、誤った測角結果を排除する正誤判断部6とを備える。
(もっと読む)
電波式物体検知装置のエイミング方法
【課題】広く広がる電波を利用する電波式物体検知装置2の取付け角度を調整する場合、周囲で不規則に反射する電波の影響を受けやすく、エイミング精度が低い。
【解決手段】電波レンズ6と電波反射面8とプラットフォーム4の相対的位置関係を位置決めし、電波発信器から電波を発信して電波受信器で電波を受信しながら、電波受信器で受信した電波強度に基づいて電波式物体検知装置2のプラットフォーム4に対する取付け角度を調整する。広く広がる電波を電波レンズ6で収束して指向性ビーム7に変換することから、周囲で不規則に反射する電波の影響を受けにくい。電波を収束する電波レンズに代えて電波を発散させる電波レンズを用いることもできる。
(もっと読む)
車載用レーダシステム
【課題】
従来技術によれば、リアルタイムでターゲット検知情報の信頼性判断をすることができない、という課題がある。
【解決手段】
当該車載用レーダシステムは、第1の電波を送信する送信手段と、第1の電波がターゲットから反射される第2の電波を受信し受信信号を得る受信手段と、受信信号に基づいて、前記ターゲットまでの距離,相対速度、及び角度を算出する算出手段と、ターゲットまでの距離,相対速度、及び角度を検出できる第一の領域と、ターゲットまでの距離、及び相対速度のみを検出できる第二の領域とを有する第一及び第二のレーダを備え、算出手段は、第一のレーダの有する第二の領域及び第二のレーダの有する第二の領域が重畳する第三の領域において、ターゲットまでの距離,相対速度、及び角度を算出する。
(もっと読む)
レーダ装置
【課題】障害発生時の運用中断の期間を短縮して可用性を向上させたレーダ装置を得る。
【解決手段】分割した覆域毎に対応させて設けられた複数の空中線を有するレーダ装置において、同一に構成された複数個の単位空中線を有する主空中線部と、この主空中線部から離間して設置された回動可能な1個の単位空中線を有する副空中線部とを用いて、レーダ波を送受信する空中線部を構成する。そして、主空中線部内の単位空中線の動作を監視し、動作異常が検出された場合には、副空中線部を、この動作異常となった単位空中線の代替として、直前までの動作状況を引き継ぎつつ、その動作を継続させるように制御する。
(もっと読む)
レーダ装置
【課題】高い追尾性能を有する小型かつ安価なレーダ装置を提供する。
【解決手段】目標の予測ゲート内で目標からの反射波を、予測ゲート外で目標からの送信波をそれぞれ受信して電気信号に変換し、受信信号として出力する受信部7と、受信部から出力される予測ゲート内または予測ゲート外の1つ以上の受信信号を用いて目標の角度を測定する測角処理部2と、受信部から出力される予測ゲート内で得られた受信信号を用いて目標までの距離および角度を測定する測距・測角処理部3と、測角処理部で測定された目標の角度を表す測角データと測距・測角処理部で測定された目標までの距離および角度を表す測距・測角データとに基づき目標を追尾する追尾処理を実行するとともに、目標の予測ゲートを生成して受信部に送る追尾処理・制御部10を備える。
(もっと読む)
全てディジタルの見通し線(LOS)プロセッサアーキテクチャ
全てディジタルの見通し線(LOS)プロセスアーキテクチャは、セミアクティブ又はアクティブなパルス化された電磁(EM)ターゲット指定システムにおいて使用する受信機の、サイズと、重量と、電力と、性能の制約に対処している。全てディジタルのアーキテクチャは、広い視野にわたる高感度のパルス検出と、適応パルス検出と、LOSの処理と、対策とに対する向上した技術のためのプラットフォームを提供する。 (もっと読む)
121 - 140 / 362
[ Back to top ]