
Fターム[5J070AC11]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354)
Fターム[5J070AC11]の下位に属するFターム
Fターム[5J070AC11]に分類される特許
1 - 20 / 362
レーダ装置及び車両
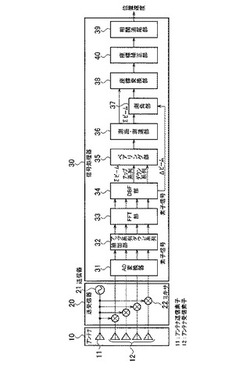
【課題】設置位置が高い場合であっても、必要な目標物を必要な観測範囲で検出および追尾できるレーダ装置を提供する。
【解決手段】単一または複数の送受信ビームによる広角のカバレッジ面および該カバレッジ面に直交する狭角のカバレッジ面を有し、広角のカバレッジ面を少なくともロール方向に回転させて送信する送受信器20と、送受信器からの送信に応答して該送受信器で受信された信号を処理することにより前方および回転により広角のカバレッジ面が接する側の路面を観測する信号処理器30とを備え、信号処理器は、送受信器からの送信に応答して該送受信器で受信された信号に基づいて広角のカバレッジ面における測距および測角により得られた極座標の信号を直交座標の信号に変換する座標変換部38と、座標変換部において得られた直交座標の信号をロール方向の回転に応じて補正する座標補正部40とを備える。
(もっと読む)
二次監視レーダ

【課題】航空機の監視性能を向上する。
【解決手段】モードS二次監視レーダは、記憶部と、登録手段と、監視処理手段と、判定手段とを備える。記憶部は、質問の送信対象である航空機のモードSアドレスのリストを記憶する。登録手段は、質問に対して航空機から送信された応答を受信すると、受信した応答に含まれるモードSアドレスが記憶部で記憶されるリストに含まれていないとき、当該モードSアドレスを記憶部が記憶するリストに登録する。監視処理手段は、質問に対して航空機から送信された応答を受信すると、受信した応答の処理結果を利用して航空機を監視する。判定手段は、航空機から送信された応答以外の信号を受信すると、当該信号に含まれるモードSアドレスが記憶部に記憶されるリストに含まれているか否かを判定し、判定結果に応じて当該信号の解析結果を出力する。
(もっと読む)
追尾装置
【課題】高い追尾性能を得ることができ、しかも、多目標を追尾する場合であっても処理負荷を低減することができる追尾装置を提供する。
【解決手段】座標系を指定する座標系制御部6と、入力された観測値の座標系を、座標系制御部から指定された座標系に座標変換する観測値用座標変換部1aと、座標系制御部から指定された座標系において、観測値用座標変換部で座標変換することにより得られた観測値と追尾している目標の航跡との相関をとる相関処理部2aと、相関処理部で相関がとられた結果に対して、座標系制御部によって指定された座標系において、フィルタリング処理を実施するフィルタリング処理部4aとを備え、該観測値を取得した機器の動作モードである捜索モード又は追尾モードに応じて、観測値用座標変換部、相関処理部およびフィルタリング処理部で使用する座標系を該追尾装置の運用中に切り換え制御する座標系制御部から構成される。
(もっと読む)
レーダ装置、および、物体導出方法
【課題】レーダ装置の部品点数の増加を防止し、発熱を抑制する技術を提供する。
【解決手段】
所定周期の第1送信波および第2送信波と、第1送信波が物体に反射した第1反射および第2送信波が物体に反射した第2反射波とに基づき、一の信号処理周期で物体に係る検知点を導出する。そして、所定条件を満たした場合に、所定周期よりも長い特定周期に変更した第1送信波、および、第1反射波に基づき一の信号処理周期で検知点を導出し、特定周期に変更した第2送信波、および、第2反射波に基づき、次の信号処理周期で検知点を導出する。これにより、物体の角度の導出処理をほとんど遅延させることなく、レーダ装置の発熱を抑制できる。
(もっと読む)
対象物の位置を検出するシステムおよび装置
【課題】RFIDタグや受信機自体の機能を変更することなく、RFIDタグを設けられた対象物の位置の検出精度を向上させる仕組みを提供する。
【解決手段】RFID(Radio Frequency IDentification)タグ41が設けられた対象物であるパレット40の位置を検出する装置であって、予め特定された位置関係でパレット40に設けられた複数のRFIDタグ41から送信された電波を受信し、この電波を送信した各RFIDタグ41の位置を検出する受信ユニット20と、この受信ユニット20により検出された複数のRFIDタグ41の位置の情報に基づき、RFIDタグ41が設けられたパレット40の位置を算出する制御ユニット30と、を備える。
(もっと読む)
物体検出装置および車両制御装置
【課題】自車に対する先々行車を正確に検出することができる物体検出装置の提供。
【解決手段】レーダ波の送出により、上記自車に対する上記物体の左右方向角度および上下方向角度、並びに上記自車から上記物体までの距離を含むレーダ情報を取得するレーダ情報取得手段と、上記レーダ情報に基づいて物体を認識する物体認識手段とを備え、上記レーダ情報取得手段によって左右方向が同一で上記自車からの距離が異なる複数の上記レーダ情報が取得され、かつ、当該複数のレーダ情報のうち上記自車から最も近い物体以外の他の物体の上記上下方向角度または当該角度に基づく上下方向位置が予め定められた条件を満たす場合、上記物体認識手段は、上記他の物体のうち上記条件を満たす物体が上記自車から最も近い物体の向こう側に上記自車の走行の障害となり得る物体として存在すると判断する。
(もっと読む)
目標追随装置、誘導装置及び目標追随方法
【課題】カルマンフィルタを用いて正確に目標をトラッキングすることが可能な目標追随装置を提供する。
【解決手段】目標追随装置は、レーダ受信機、サンプル選択部及びトラッキングフィルタ部を具備する。レーダ受信機は、イルミネータからの送信波が目標で反射した反射波を受信し、受信した反射波に基づいて目標への角度及び反射波の受信電力を取得する。サンプル選択部は、受信電力の値が、過去の受信電力に基づいて設定される基準値から所定値以上減少しているか否かを判断し、基準値から所定値以上減少している場合、取得した角度及び受信電力を除去し、基準値から所定値以上減少していない場合、取得した角度及び受信電力を出力する。トラッキングフィルタ部は、サンプル選択部から出力される角度及び受信電力に基づき、目標の角度についてのトラックを推定する。
(もっと読む)
物体検出装置
【課題】歩行者のようなレーダの送信信号に対する低反射物体であってもレーダにより確実に検出することができる物体検出装置を提供する。
【解決手段】車両に搭載されたカメラ100によって撮像された画像に基づいて物体40の種類を判定する物体種類判定部102と、車両に搭載された電磁波を送信するレーダ20の受信信号に基づいて物体40に関する情報を検出するレーダ物体検出部211と、前記レーダ20を制御するレーダ制御部200とを備え、レーダ制御部200は、物体種類判定部102が判定した物体40の種類に応じて、レーダ20の距離分解能と、速度分解能と、角度分解能と、送信電力と、受信ゲインと、送信アンテナの種類の切り替えと、のうちの少なくとも一つを制御する。
(もっと読む)
目標追跡システムとそのプログラム及び方法、角度追跡装置とそのプログラム及び方法、目標追跡装置とそのプログラム及び方法
【課題】装置規模の縮小、処理時間の短縮を実現する。
【解決手段】目標追跡装置13において、角度追跡装置12−iから2次元観測値と2次元航跡の対が入力されると、予測処理部131により、維持している3次元航跡から2次元予測値を算出し、相関処理部132により、算出された2次元予測値と角度追跡装置12−iからの2次元観測値の相関の有無を判定し、相関がないと判定された場合、2次元航跡抽出部133により、相関がないと判定された2次元観測値の対となる2次元航跡を抽出し、3次元航跡生成部134により、2次元航跡抽出部133で抽出した異なる角度追跡装置からの2次元航跡に基づいて、3次元航跡を生成する。一方、相関があると判定された場合、平滑処理部135により、相関があると判定された2次元観測値を用いて2次元予測値に対応する3次元航跡を更新する。
(もっと読む)
信号処理装置、レーダ装置、および、信号処理方法
【課題】送信波の出力時間を短縮化して物体の角度検出精度を向上させることを目的とする技術に関する。
【解決手段】
ビート信号をAD変換してデジタルデータを導出し、デジタルデータを複数のデータ群に分割する。次に、データ群を高速フーリエ変換してデータ群の数に対応する複数の変換データを取得し、変換データを複数の組に分けて組ごとの相関行列を取得して、相関行列を平均した値を算出する。そして、相関行列を平均した値に基づいて検知点の角度を演算する。これにより、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
(もっと読む)
車両用移動物体検出装置
【課題】自車両周辺における移動物体の移動状態ならびに移動量の認識精度を向上した車両用移動物体検出装置を提供することことを課題とする。
【解決手段】移動遷移状態把握部13によって、自車両の移動量に基づいて回避対象物体の特徴点位置の移動遷移状態を算出し、回避対象物体の特徴点位置の移動遷移状態に基づいて、回避対象物体の移動を認識する。また、移動量算出部19によって、回避対象物体における特徴点位置の移動遷移状態に基づいて、自車両に対する回避対象物体の相対的な移動量を算出し、回避対象物体の移動遷移状態を認識する処理周期と比較して十分に長い周期で回避対象物体の移動量を算出する。
(もっと読む)
レーダ装置及び目標位置算出方法
【課題】レーダ装置により算出される目標位置観測値のバタつきを抑制し、目標追尾処理を安定化させること。
【解決手段】本発明に係るレーダ装置(1)は、データ生成部(30)と、目標検出部(42)と、目標距離算出部(43)とを備える。データ生成部(30)は、追尾目標から受信した反射波に関するデータ(DA)を、レンジビン毎に生成する。目標検出部(42)は、距離ゲート(RG)内においてデータ(DA)が閾値レベル(TH)以上であるレンジビンの集合、あるいは、レンジビンの集合に振幅レベルが閾値レベル(TH)未満であるレンジビンがあるものの当該レンジビンの数や幅(隣接レンジビンの振幅レベルが閾値レベル(TH)未満であるレンジビンの数)が規定を満足しており集合と認められるものを、追尾目標に対応する目標レンジビン集合(TBG)として抽出する。目標距離算出部(43)は、目標レンジビン集合(TBG)に属する全レンジビンが示すそれぞれの距離の平均値を、追尾目標への距離である目標距離(R)として算出する。
(もっと読む)
追尾装置
【課題】センサと目標との距離が大きい場合には追尾維持性能を発揮し、センサと目標との距離が小さい場合には、各追尾目標に対する追尾精度を向上させる。
【解決手段】センサを介して2つの観測値を取得した場合に、センサ位置を基準点とした2つの観測値のなす角度を算出する角度算出部21と、角度算出部21により算出された2つの観測値のなす角度に基づいて2つの観測値に対する重み係数を算出し、重み係数に基づいて各観測値の各観測値間での重心をそれぞれ算出する角度基準重心算出部22と、角度基準重心算出部22により算出された各観測値の重心および各追尾目標に対する予測値に基づいて、各追尾目標に対する平滑値を算出する平滑処理部24とを備えた。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な物体単位データを抽出する。また、抽出した物体単位データの中から、車幅方向の距離が最も自車側に位置する停止物体の横位置を抽出すると共に、車幅方向において最も自車側の停止物体の横位置から所定距離だけ離れた範囲内に位置し、かつ、自車からの直接の距離が最も小さい停止物体を起点に決定する。そして、接続条件として距離が単調増加であるデータ同士を起点から接続してグルーピングして路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。
(もっと読む)
レーダ装置
【課題】距離アンビギュイティなしに目標の測距値を求めることができるとともに、ドップラアンビギュイティなしに低RCS高速移動目標のラジアル速度を推定することができるレーダ装置を得ることを目的とする。
【解決手段】Σ復調器10により復調されたΣ系受信信号から目標を検出して、その目標の測距値を出力する目標検出器14を設け、目標情報推定器15が、Σ復調器10により復調されたΣ系受信信号とΔ復調器12により復調されたΔ系受信信号から目標の測角値θs及びラジアル速度vsを推定するとともに、そのラジアル速度vsを用いて、目標検出器14から出力された目標の測距値を補正する。
(もっと読む)
車両用障害物検出装置
【課題】縁石などの道路構造物がターゲットであると誤検知するのを防止できる車両用障害物検出装置の提供を目的とする。
【解決手段】車両の少なくとも左右何れか一方においてバンパ6裏面と車輪2との間に設けられて車両外方へ電波を送信することにより障害物を検出するレーダ装置4を備えた車両用障害物検出装置であって、
上記レーダ装置4からの送信波の一部が車両外側の道路構造物に到達し、該道路構造物から帰来する道路構造物到達波αにより生じる誤検知を防止する誤検知防止手段7を備えたことを特徴とする。
(もっと読む)
指示支援装置
【課題】本発明は、近接した複数の目標から到来した反射波、またはその反射波が示す画像を処理することにより、これらの複数の目標の区分を図る指示支援装置に関し、近接した複数の目標の寸法ならびに相対的な配置に柔軟に適応し、これらの目標の区分のために要する処理量を安定に削減できることを目的とする。
【解決手段】到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する判別手段と、前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する適応処理手段とを備える。
(もっと読む)
レーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラム
【課題】演算処理の負荷を増大させることなく適切に到来方向を推定可能なレーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラムを提供することを課題とする。
【解決手段】物標の方向を複数のアンテナ3の各受信信号に基づいて特定するレーダ装置1用の演算装置15であって、予め設定した分離可能数に応じた数の物標の角度を前記各受信信号から推定する所定の推定アルゴリズムを使い、任意の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成し、前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて、設定した前記分離可能数の適否を判定する演算部6を備える。
(もっと読む)
車載用レーダ装置
【課題】電流検出抵抗を用いることなく、チョッパ型電源回路の内部回路消費電流異常又は電力変換効率異常を検出できる車載用レーダ装置を得る。
【解決手段】チョッパ型電源回路の入力電圧を取得する入力電圧取得回路13と、チョッパ型電源回路のデューティ比を電圧に変換するデューティ比電圧変換回路9と、チョッパ型電源回路の入力電圧とデューティ比変換電圧との正常時の相関テーブルとを備え、デューティ比電圧変換回路9で得られるデューティ比変換電圧を、入力電圧取得回路13で得られる入力電圧を基に、前記相関テーブルと比較して、チョッパ型電源回路の内部回路消費電流異常又は電力変換効率異常の電源系異常を検出する。
(もっと読む)
レーダ装置及びアレーアンテナ
【課題】 原点及び原点近傍の同一座標上に配置されるアンテナ素子へ与える位相が複雑であっても、その位相制御が容易なレーダ装置及びアレーアンテナを提供する。
【解決手段】 レーダ装置は、アレーアンテナ、送信部、受信部、位相制御部及び信号処理部を具備する。アレーアンテナは、アンテナ素子と送受信モジュールとが予め設定された数だけ整列されて成る第1及び第2のサブアレーアンテナを複数備え、アンテナ開口の中心線近傍では、第1及び第2のサブアレーが混同して配置される。送信部は、送信信号を生成してアレーアンテナへ出力する。受信部は、アレーアンテナで受信された受信信号に対して受信処理を行う。位相制御部は、第1のサブアレーと、第2のサブアレーとが逆位相となり、アンテナ開口でのΔ信号の振幅分布がアンテナ開口の中心線近傍で小さくなるように送受信モジュールを制御する。信号処理部は、受信信号から所望信号を取得する処理を行う。
(もっと読む)
1 - 20 / 362
[ Back to top ]