
Fターム[5J070AC12]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 仰角又は俯角 (115)
Fターム[5J070AC12]に分類される特許
1 - 20 / 115
レーダ装置
【課題】鉛直方向の方位測定精度が向上されたレーダ装置の実現。
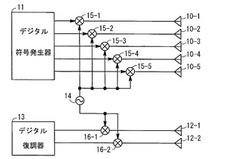
【解決手段】レーダ装置は、送信アンテナ10−1〜10−5と、デジタル符号発生器11と、受信アンテナ12−1、12−2と、デジタル復調器13を有している。送信アンテナ10−1、10−3、10−5は、放射方向が斜め鉛直上方となるように設計され、送信アンテナ10−2、10−4は、放射方向が斜め鉛直下方となるように設計され、送信アンテナ10−1〜10−5全体では、放射方向が水平方向となるように設計されている。デジタル符号発生器11は、擬似雑音符号Aで変調された信号と擬似雑音符号Bで変調された信号とを合わせた信号が送信アンテナ10−1、10−3、10−5へと出力され、擬似雑音符号Bで変調された信号と擬似雑音符号Cで変調された信号とを合わせた信号が送信アンテナ10−2、10−4へと出力されるよう構成されている。
(もっと読む)
追尾装置

【課題】高分解能センサ及び低分解能センサによる航跡に対して正確な割り当てを行うことで、真の目標数分の航跡を生成する。
【解決手段】目標を観測して航跡を生成するセンサ1と、センサ1より低分解能であり、目標を観測して航跡を生成するセンサ2と、センサ1,2により生成された航跡を1対1で割り当てる航跡割当処理部3と、割当結果に応じて、センサ1により生成された航跡を、センサ2により生成された対応する航跡に基づいて更新する第1の航跡更新部5と、割当結果に応じて、センサ1により生成された未割当ての航跡を、センサ2により生成された複数の航跡に基づいて更新する第2の航跡更新部6と、センサ1,2の分解能比に基づいて、第1,2の航跡更新部5,6の動作を制御する分解能比判定処理部4と、更新された航跡を統合する航跡更新統合処理部7とを備えた。
(もっと読む)
ドップラーレーダシステム、及び物体検知方法
【課題】受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上する。
【解決手段】本発明に係るドップラーレーダシステム100は、送信アンテナ120と、複数の受信アンテナ121と、目標物体150に含まれる複数の反射点の各々の位置を示す複数の測定点を算出するマイクロドップラー演算部105と、第1間隔を有する第1分割枠を用いて、測定点の第1重心116aを算出する第1重心算出部106aと、第1間隔より狭い第2間隔を有する第2分割枠を用いて、測定点の第2重心116bを算出する第2重心算出部106bと、複数の第2重心116bの中から、第2重心116bと第1重心116aとの位置関係に基づいて、少なくとも1つの第2重心116bを目標物体150の位置に決定する重心決定部107とを備える。
(もっと読む)
レーダ装置及び受信データ処理方法
【課題】現スキャンで得られたデータに、過去のスキャン結果に基づいて推定したデータを正確に積分することが可能なレーダ装置及びこのレーダ装置で用いられる受信データ処理方法を提供する。
【解決手段】レーダ装置は、無線部、パルス圧縮部、ドップラフィルタ処理部、信号処理部、予測部、加算部及び抽出部を具備する。パルス圧縮部は、無線部で受信したパルス信号にパルス圧縮処理を施す。ドップラフィルタ処理部は、パルス圧縮後のデータにドップラフィルタ処理を施すことで、周波数ビン毎のレンジセルデータを生成する。信号処理部は、レンジセルデータを固有データに変換する。予測部は、前回のスキャン結果に基づき所定の範囲に目標が位置すると予測する予測データを作成する。加算部は、予測データと、次スキャン時に取得される固有データとを、同一の位置同士で足し合わせる。抽出部は、足し合わせたデータのうち、強度が最大の位置のデータを抽出する。
(もっと読む)
津波監視システム
【課題】 観測装置設置の経済性とメンテナンス性において卓越し観測確認が容易な津波監視システム。
【解決手段】 陸上に設置したレーダーから発するレーダー波により監視海面を一定周期でスキャンニングし、レーダー波の反射により監視海面の測定を行い、データを処理して海面の隆起を測定し、この観測測定において海面の上昇が一定値を超えたときにおいて警報を発することを特徴とする津波監視システム、地震発生時に、陸上に複数箇所に設置したP波地震計の観測データをサーバーに集め、発生した地震のP波の分析により、海側の震源とその地震の規模を算出し、津波の発生の可能性とその大きさを予測し、津波の可能性とその大きさが一定値を超えたときにおいて、前記記載の津波監視システムのデータとを総合的に判定して最終避難警報を発すること特徴とする津波監視システム。
(もっと読む)
目標追尾装置
【課題】PRI内距離を目標の運動諸元の推定処理に利用できるようにして、目標の運動諸元の推定精度を高めることができる目標追尾装置を得ることを目的とする。
【解決手段】PRI内距離ゲート内外判定部14によりゲート内にあると判定されたPRI内距離毎に推定値の仮説を生成して、その仮説の信頼度を算出し、1以上の仮説の中で、信頼度が高い仮説を採択する推定値仮説生成部15や、推定値仮説生成部15により採択された仮説に係るPRI内距離を用いて、現時点での運動諸元の推定値を更新するPRI内距離フィルタ処理部16などを備える。
(もっと読む)
レーダ装置及び受信データ処理方法
【課題】 過去のスキャンで発生した雑音信号の影響を抑え、目標の位置を正確に検出することが可能なレーダ装置及び受信データ処理方法を提供する。
【解決手段】 レーダ装置は、無線部、パルス圧縮部、ドップラフィルタ処理部、信号処理部、予測部及び積分部を具備する。パルス圧縮部は、無線部で受信したパルス信号に対してパルス圧縮処理を施す。ドップラフィルタ処理部は、パルス圧縮後のデータに対してドップラフィルタ処理を施す。信号処理部は、ドップラフィルタ処理部で1スキャン毎に取得されるデータを固有データに変換する。予測部は、過去のスキャンで取得された固有データに基づいて次スキャン時の目標の位置を予測し、予測した位置に過去の固有データを累積した予測データを作成する。積分部は、次スキャン時に取得される固有データと、累積される積分数が予め設定された回数に抑えられた予測データとを積分する。
(もっと読む)
測角装置
【課題】不等間隔配置を3次元アンテナ配置に適用した場合でも、仰角θの独立なモノパルス測角を実現することのできる測角装置を得る。
【解決手段】鉛直方向の線形アレーアンテナの二つのアンテナ素子グループに対応するようにアンテナ素子2,3を二つの領域に分割する。合成部5,6は、これら二つの領域の受信信号について差信号Δと和信号Σを生成する。除算部7は、差信号Δを和信号Σで除算し、測角部8は、除算部7の演算結果を用いて仰角θのモノパルス測角を行う。
(もっと読む)
車両用制御対象物判定装置
【課題】上方物は下方物といった非制御対象物に対し車体制御に必要か否かを判定することが可能な車両用制御対象物判定装置を提供する。
【解決手段】上下方向に異なる高さに設定された複数のレイヤに基づいて車両前方の物体を検出する物体検出手段と、物体検出手段により各レイヤにて得られた複数の検出点データを結合し、一つの物体として認識するグルーピング手段と、を備えた車両用制御対象物判定装置において、グルーピング手段は、複数のレイヤの各々の検出点データの個数の差が所定以上である場合は、検出点データの個数の差が所定以上である各レイヤにて検出された検出点データをグルーピングすることなく、それぞれ別の物体であると認識する。
(もっと読む)
レーダ装置及び受信データ処理方法
【課題】 ドップラフィルタ処理後のデータをスキャン間で正確に積分することが可能なレーダ装置及びこのレーダ装置で用いられる受信データ処理方法を提供する。
【解決手段】 レーダ装置は、無線部、パルス圧縮部、ドップラフィルタ処理部及び積分処理部を具備する。無線部は、外部からパルス信号を受信し、パルス信号を、パルス圧縮係数を生成するサンプリング周波数よりも大きいサンプリング周波数でオーバーサンプリングしてデジタル変換する。パルス圧縮部は、デジタル変換でのオーバーサンプリングによりサンプル数が増加したデジタルデータに対して、パルス圧縮係数を用いてパルス圧縮処理を施し、パルス信号毎のレンジセル信号を生成する。ドップラフィルタ処理部は、レンジセル信号に対してドップラフィルタ処理を施すことで、レンジセル毎の周波数バンク信号を生成する。積分処理部は、周波数バンク信号をスキャン間でレンジセル毎に積分する。
(もっと読む)
追尾装置
【課題】テンプレートマッチングと比べて目標領域の抽出精度の向上および抽出処理負荷の低減を図ることのできる追尾装置を得る。
【解決手段】目標抽出装置100は、追尾フィルタ装置200が出力した追尾予測値と新規入力画像各画素との間で、3次元空間上と画像平面上の、次元の異なる2種類の相関処理を実行し、これらの相関値から新規入力画像中の目標画素および目標領域を抽出し、追尾フィルタ装置200への入力となる新規画像上の追尾点を決定する。追尾フィルタ装置200は、目標抽出装置100が出力した追尾点に基づいて、3次元空間上での追尾点の位置、速度、強度の予測を行い、次のフレームの追尾予測値として出力する。
(もっと読む)
測角装置、レーダ装置、測角方法及び測角プログラム
【課題】マルチパス環境下において、短時間でより精度の高い仰角推定を可能とする測角装置等を提供する。
【解決手段】測角装置としての測角処理器5は、第1仰角算出部51、第2仰角算出部52及び直接波仰角出力部50を備えたことを特徴とする。第1仰角算出部51は、受信信号に基づいて直接波仰角及び間接波仰角を算出する。第2仰角算出部52は、受信信号に基づいて直接波仰角のみを算出する。直接波仰角出力部50は、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出された場合は第1仰角算出部51で算出された直接波仰角を出力し、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出されなかった場合は第2仰角算出部52で算出された直接波仰角を出力する。
(もっと読む)
目標検出装置、誘導装置及び目標検出方法
【課題】少ないアンテナ数、低SNRで、目標の動揺がある場合でも、目標のクロスレンジ方向を含む形状を推定することが可能な目標検出装置、誘導装置及び目標検出方法を提供する。
【解決手段】目標検出装置は、レーダ部、主要反射位置抽出部、パワー記録部、変動幅判定部、頻度カウント部及び相対広がり算出部を具備する。レーダ部は、レンジ測定範囲内で有意な振幅を示す複数のレンジ、及び、有意な振幅の振幅値を取得する。主要反射位置抽出部は、レンジ及び振幅値の受信状況に基づき、目標内の主要反射位置を選定する。パワー記録部は、主要反射位置毎の振幅値を処理期間の間記録する。変動幅判定部は、記録された振幅データの変動幅が閾値を超える主要反射位置の振幅データを出力する。頻度カウント部は、出力された主要反射位置の振幅データの変動頻度を計測する。相対広がり算出部は、主要反射位置及び変動頻度から、目標内の位置及び相対的な広がりを求める。
(もっと読む)
センサ統合システム及びセンサ統合方法
【課題】複数種類のセンサによる観測データを組み合わせて、目標物の高精度な移動軌跡を抽出する。
【解決手段】プロセッサと、前記プロセッサに接続される記憶装置と、前記プロセッサに接続される出力装置と、を備えるセンサ統合システムであって、前記記憶装置は、複数のセンサによって観測された観測データを保持し、前記観測データはあらかじめ規定された項目のうち選択的に記述された項目を含み、前記プロセッサは複数の前記観測データの選択記述された前記項目を組み合わせ、一つ以上の目標物の移動軌跡を推定し、前記出力装置は、前記移動軌跡を示す情報を出力する。
(もっと読む)
レーダ装置、レーダ受信装置及び目標検出方法
【課題】 目標が低RCSである場合であっても、目標を検出することが可能なレーダ装置と、このレーダ装置で用いられるレーダ受信装置及び目標検出方法を提供すること。
【解決手段】 レーダ装置は、送信装置、無線部、4次元データ生成部、予測部、積分処理部及び目標検出部を具備する。送信装置は、送信パルスを送信する。無線部は、送信パルスが反射等された反射パルスを受信する。4次元データ生成部は、反射パルスに対してレンジ毎にDFTを行い、周波数ビン毎の周波数バンク信号を生成し、1スキャンにより取得される周波数バンク信号を、レンジと、方位角及び仰角と、相対速度とにより特定される4次元データへ変換する。予測部は、4次元データに基づいて予測4次元データを作成する。積分処理部は、4次元データと、前のスキャンに基づいて作成された予測4次元データとを積分する。目標検出部は、積分結果に基づいて目標を検出する。
(もっと読む)
電波発射源検出センサ及び自動料金収受システム
【課題】所定のレーンに設置された路側器と、その隣接レーンに存在する車載器との間で確立された誤通信を中断し、車載器に対する誤課金を防止することが可能な電波発射源検出センサと、このセンサを用いた自動料金収受システムとを提供する。
【解決手段】第1及び第2のレーンに設置され、移動体に所持された応答器と通信を行う第1及び第2の路側器と接続する電波発射源検出センサは、アンテナ部、検波部、方向特定部、誤通信判定部を具備する。アンテナ部は、第1及び第2のレーンを含む受信ビームにより、応答器からの応答信号を受信する。検波部は、応答信号から必要信号を検波する。方向特定部は、検波結果に基づいて、電波強度、到来方向及び応答周波数を取得する。誤通信判定部は、電波強度、到来方向及び応答周波数に基づき、応答器との通信は誤りであるとの旨の誤通信通知を第1及び第2の路側器へ出力する。
(もっと読む)
多目標追尾装置、多目標追尾方法、および多目標追尾プログラム
【課題】追尾ビームを効率的に追尾目標に照射し追尾精度を有効に向上させる。
【解決手段】電子走査アンテナ部101で取得された信号に基づいて、一のビーム照射により検知可能な異なる追尾目標を追尾目標グループとして決定する追尾目標グループ算出部110と、追尾目標グループに含まれる異なる追尾目標間の相互位置関係に応じて追尾用のビームの照射スケジュールおよび照射領域を示すビームパラメータを算出する、追尾ビームパラメータ算出部106と、算出されたビームパラメータに基づき電子走査アンテナ部101によるビーム照射動作の起動スケジュールを決定し、これに基づき電子走査アンテナ部におけるビーム照射動作を制御するアンテナ制御部109を備えた。
(もっと読む)
レーダ装置及び物標検出方法
【課題】アンテナを回転して送信ビームを放射するレーダ装置及び物標検出方法において、各方位における送受信に要する時間を長くすることなく、クラッタなどからの物標の受信信号成分の分離を行ない易くすることである。
【解決手段】アンテナ20は、回転軸24の周りを回転しつつ各方位において、1パルスの送信ビーム25を放射して反射体からの反射エコーを受信する。仰俯角方向走査部30は、1パルスの送信ビーム25を、仰俯角に応じて周波数が異なるように、方位毎に仰俯角方向に走査する。受信部60は、周波数成分検出部62によって、アンテナ20で受信した受信信号の周波数成分から反射体の仰俯角を検出する。同時に、受信部60は、振幅成分検出部61によって、受信信号の時間成分から反射体の距離を検出する。
(もっと読む)
レーダ装置
【課題】対象物の水平方向と鉛直方向の両方の角度を検出できるレーダ装置を得る。
【解決手段】全てのアンテナは、水平面と直角となる平面である鉛直面に配置され、かつ長方形である開口面の長手方向が鉛直方向に配置され、受信アンテナRx1、Rx2は、素子間隔Lhで水平方向に配置され、送信アンテナTx1、Tx2は、受信アンテナRx1、Rx2を挟むように、水平方向に配置され、受信アンテナRx3、Rx4は、素子間隔Lvで鉛直方向に配置され、かつ、送信アンテナTx2に隣接して水平方向に配置され、送信アンテナTx1、Tx2から時分割に高周波パルス信号を送信させ、受信アンテナRx1、Rx2によって受信された2つの受信信号の位相差から水平方向の方位角を検出するとともに、受信アンテナRx3、Rx4によって受信された2つの受信信号の位相差から鉛直方向の仰俯角を検出する信号処理器10を備える。
(もっと読む)
モノパルス給電回路
【課題】本発明は、複数のアンテナに並行して到来した到来波の和と差とのパターンを得ることにより、その到来波の到来方向の計測等を可能とするモノパルス給電回路に関し、従来例に比べて構成が簡略化され、かつ実装上の制約の緩和が大幅に図られると共に、軽量化および小型化が可能であることを目的とする。
【解決手段】互いに貫通して交叉する導波路を形成する第一の導波管と、前記第一の導波管の側壁の内、前記導波路が交叉する部位に突設され、前記導波路を拡張する第二の導波管とを備え、前記導波路の4つの末端から前記部位までの長さは、個別に点対称に配置された2対のアンテナの個々の給電点から前記4つの末端をそれぞれ介して前記部位に至る4つの区間の伝搬路長が同じとなる値に設定される。
(もっと読む)
1 - 20 / 115
[ Back to top ]