
Fターム[5J070AC13]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 方位 (873)
Fターム[5J070AC13]に分類される特許
41 - 60 / 873
信号検出装置、信号検出方法及び信号検出プログラム
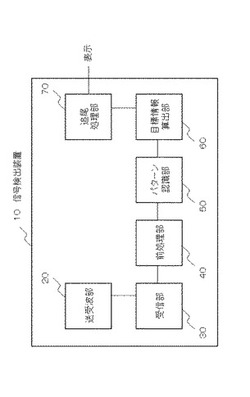
【課題】S/Nの低い受信信号であっても、検出漏れや誤判定の発生を抑制することができ、確信度がある程度ある目標があった場合に、追尾が継続しやすくなる追尾処理部を備える信号検出装置の提供。
【解決手段】音波や電磁波を発信し、目標からの反響信号の受信信号を所定の区間切り出して反響信号のスペクトルに変換した上で特徴抽出を行いパターン認識用のパターンを生成する前処理部と、入力されたパターンをあらかじめ学習されたSVM(サポートベクターマシーン)により、目標らしさを判定し、その出力を正規化し確信度として出力するパターン認識部と、確信度を閾値判定し、検出ありと判定された場合は、目標の方位距離やS/Nなどの検出目標に関わる情報を算出する目標情報算出部と、追尾処理に位置情報以外のSVMなどのパターン認識処理自体の出力値である確信度値を活用した追尾処理部を備える。
(もっと読む)
後側方障害物検知装置

【課題】自車両が低速で走行する場合であっても、非報知対象物であるガードレール等の静止物が、報知対象物である他車両等の移動物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物と報知対象物に分類する対象物分類部と、自車両の走行速度に応じて、対象物を非報知対象物に分類する条件を制御する非報知対象物分類条件制御部とを備える。
(もっと読む)
目標追尾装置
【課題】PRI内距離を目標の運動諸元の推定処理に利用できるようにして、目標の運動諸元の推定精度を高めることができる目標追尾装置を得ることを目的とする。
【解決手段】PRI内距離ゲート内外判定部14によりゲート内にあると判定されたPRI内距離毎に推定値の仮説を生成して、その仮説の信頼度を算出し、1以上の仮説の中で、信頼度が高い仮説を採択する推定値仮説生成部15や、推定値仮説生成部15により採択された仮説に係るPRI内距離を用いて、現時点での運動諸元の推定値を更新するPRI内距離フィルタ処理部16などを備える。
(もっと読む)
後側方障害物検知装置
【課題】自車両がガードレール等の非報知対象物と近い位置にある場合であっても、報知対象物である他車両等が非報知対象物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物として検知する検知角度の範囲である非報知対象物検知範囲の大きさを制御する非報知対象物検知範囲制御部と、自車両から非報知対象物までの距離を算出する距離算出部とを備え、非報知対象物検知範囲制御部は、距離算出部によって算出された自車両から非報知対象物までの距離に応じて、非報知対象物検知範囲の大きさを制御する。
(もっと読む)
追尾情報管理装置、追尾情報管理システム及びレーダ装置
【課題】異なるレーダ装置間で整合のとれた追尾情報を表示可能なレーダ装置を提供する。
【解決手段】追尾情報管理装置は、受信部と、判断部と、グローバルID付与部と、送信部と、を備える。受信部は、レーダエコーに基づいて目標追尾を行うことで得られたTT情報を複数のレーダ装置から受信する。判断部は、TT情報に含まれる目標エコー同士が物標を示すか否かを判断する。グローバルID付与部は、判断部の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与する。送信部は、グローバルID付与部が付与したグローバルIDをそれぞれのレーダ装置に送信する。各レーダ装置は、グローバルID付与部から付与されたグローバルIDとともに、目標エコーを表示する。
(もっと読む)
無線測位システムおよび無線測位装置
【課題】照明設備に近接して設置された無線基地局と、移動端末との間で、一方向通信もしくは時分割で双方向通信を行うことによって、移動端末、RFIDタグ、もしくはこれらの両方の2次元もしくは3次元の位置を高精度で測位できる無線測位システムおよび無線測位装置を安価に実現する。
【解決手段】無線信号を用いて2次元もしくは3次元の位置を測位するために、無線基地局を照明設備の内部もしくは外部に近接して設置し、前記照明設備に電力を供給するための配電ケーブルをツイストペアとし、前記配電ケーブルを介して照明設備と無線基地局とに電力を給電するとともに、前記無線基地局にデジタル信号を伝送する。
(もっと読む)
レーダ装置
【課題】各送信側系統間の動作を同期させるための回路構成を追加せずに、簡易な構成により複数のレーダ信号を分離する。
【解決手段】第1レーダ送信部は、所定の符号長の符号系列を、第1符号幅を用いて所定数繰り返した第1変調信号を送信する。第2レーダ送信部は、同じ符号系列を、第2符号幅を用いて所定数繰り返した第2変調信号を送信する。レーダ受信部は、第1符号幅と第2符号幅の差分値よりも小さいサンプリング周期で離散信号に変換するA/D変換部と、A/D変換部からの出力信号を、第1符号幅に応じた所定のサンプル数分遅延させる第1遅延部と、第2符号幅に応じた所定のサンプル数分遅延させる第2遅延部と、A/D変換部と第1遅延部とからの各出力信号とを基に第1相関値を算出する第1相関値算出部と、A/D変換部と第2遅延部とからのからの出力信号とを基に第2相関値を算出する第2相関値算出部とを用いて複数の受信信号を分離する。
(もっと読む)
レーダ装置及び受信データ処理方法
【課題】 過去のスキャンで発生した雑音信号の影響を抑え、目標の位置を正確に検出することが可能なレーダ装置及び受信データ処理方法を提供する。
【解決手段】 レーダ装置は、無線部、パルス圧縮部、ドップラフィルタ処理部、信号処理部、予測部及び積分部を具備する。パルス圧縮部は、無線部で受信したパルス信号に対してパルス圧縮処理を施す。ドップラフィルタ処理部は、パルス圧縮後のデータに対してドップラフィルタ処理を施す。信号処理部は、ドップラフィルタ処理部で1スキャン毎に取得されるデータを固有データに変換する。予測部は、過去のスキャンで取得された固有データに基づいて次スキャン時の目標の位置を予測し、予測した位置に過去の固有データを累積した予測データを作成する。積分部は、次スキャン時に取得される固有データと、累積される積分数が予め設定された回数に抑えられた予測データとを積分する。
(もっと読む)
物体識別装置、および物体識別プログラム
【課題】車両の周囲に存在する物体の種別を識別する物体識別装置において、物体を正確に識別できるようにする。
【解決手段】衝突防止システムにおいては、自車両の周囲に音波または電磁波を照射して該音波または電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物体までの距離の情報を含む物体情報を取得し(S110)、物体の高さの情報を取得する(S130)。そして、物体の高さおよび物体までの距離に応じて反射強度を補正し(S140)、補正後の反射強度に応じて物体の種別を識別する(S170〜S280)。よって、反射強度を正常に検出することを妨害する要素を除外するように反射強度を補正することができ、正確に反射強度を検出できるようにすることで、物体を正確に識別することができる。
(もっと読む)
移動物体検出装置
【課題】複数の移動体を単一の移動物体であると誤認識してしまう状況の発生を抑制
【解決手段】移動物体検出装置1は、レーダ波を前方に向けて送信し、送信したレーダ波の反射波を観測した結果に基づいて、レーダ波を反射した反射点の位置である反射点位置を連続して検出する。検出された2つの反射点位置のうち、移動物体検出装置1から遠い方の反射点位置である第1反射点位置を移動物体における前端部の位置であるとし、移動物体検出装置1から近い方の反射点位置である第2反射点位置を移動物体における後端部の位置であるとして、第1反射点位置と第2反射点位置との間の距離である反射点間距離の時間経過による変動量が、反射点間距離の変動量が小さいことを示す予め設定された変動判定条件を満たす場合に、第1反射点位置および第2反射点位置がそれぞれ移動物体の前端部および後端部の位置であると判断する。
(もっと読む)
レーダ装置、検査システム、及び検査方法
【課題】レーダ装置の検査を実施する環境として適切であるか否かを判定可能とすること。
【解決手段】レーダ装置30で実行する信号解析処理では、動作モードが環境検査モードであれば(S210:YES)、比較固有値λMの各々について固有値比SlMを算出する(S220)。この固有値比SlMは、強い相関を有する到来波に対応する固有値λ同士の間で導出されたものであれば小さな値となり、到来波に対応する固有値λと熱雑音に対応する固有値λとの間で導出されたものであれば大きな値となる。そして、基準閾値Th以下となる固有値比SlMが存在しなければ(S230:NO)、軸検査を実施する環境として適している旨を出力し(S240)、基準閾値Th以下となる固有値比SlMが1つでも存在すれば(S230:YES)、軸検査を実施する環境として不適である旨を出力する(S250)。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】道路における停止物の中から反射体の物体単位データを抽出し、抽出した反射体の物体単位データに基づいて反射体の列を通る円を近似することにより道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、反射体の物体単位データを抽出する際には、前回周期で抽出した反射体の物体単位データのうち、前回周期で算出した道路形状推定Rを基準とした径方向の所定範囲内に位置するものを今回周期の抽出処理で抽出した反射体の物体単位データに追加する。また、道路形状認識を行う際には、データ追加後の反射体の物体単位データに基づいて道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。
(もっと読む)
物体検知装置
【課題】画像処理による負荷を極力増大させることなく歩行者等の存在を検知できる物体検知装置を提供する。
【解決手段】物体検知装置は、強度が第1閾値以上である反射波の方向の範囲を物体が存在する物体範囲として、物体の幅を算出する物体幅算出手段33と、物体の幅が所定幅以上である幅広の物体に係る反射波の強度等が特定の状況にある場合、第1閾値よりも大きな第2閾値により、幅広の物体に係る物体範囲を分割する物体範囲分割手段36と、その物体範囲の分割後の各範囲に対応する画像データに基づき、目的物を検出する処理を行う目的物検出手段39とを備える。
(もっと読む)
システム及びプログラム
【課題】面白味があり、ユーザの注意を得やすく、親しみやすくなるシステム。
【解決手段】 警報対象の位置情報を記憶するデータベースから取得した当該警報対象の位置情報で特定される位置と、取得した車両の現在位置とが所定の接近関係を有する場合に表示部5のメイン表示領域R1に所定の警報を表示する制御部を備えたシステムである。所定の警報は、警報対象と関係のないキャラクタ300をアニメーション表示するようにした。
(もっと読む)
レーダ装置
【課題】部品点数の増加を抑えて、ナイキスト周波数による折り返しで発生した信号成分を検出する。
【解決手段】複数のアンテナの送受信波に基づいてターゲットの検出信号を生成する検出信号生成部と、生成されたターゲットの検出信号に対して周波数解析を行い、ターゲットの信号成分を抽出し、該信号成分に対して所定の処理を実行することで、ターゲットまでの距離、ターゲットとの相対速度、ターゲットの方位のうち少なくとも何れか一つを算出する検出信号処理部と、を備え、検出信号生成部は、ナイキスト周波数よりも高い周波数帯域において各アンテナに対応する検出信号に変化を与えるフィルタ部を有し、検出信号処理部は、フィルタ部によって変化が与えられた各アンテナに対応する検出信号から信号成分を取得することで、該信号成分がナイキスト周波数による折り返しで発生した信号成分か否かを判定する。
(もっと読む)
物体検知装置
【課題】画像処理による負荷を極力増大させることなく歩行者等の存在を検知できる物体検知装置を提供する。
【解決手段】物体検知装置は、各探知領域内の強度が所定値以上である反射波の方向の範囲を物体が存在する物体範囲として、物体の幅及び位置を算出する幅・位置算出手段33と、各物体の幅及び位置に基づき、装置の前方に、各探知領域と交差する路面が存在し、各探知領域における物体範囲が分離していると判定された場合、物体範囲の分離している部分に対応する画像データに基づき、検知対象である目的物の有無を検出する目的物検出手段39とを備える。
(もっと読む)
測角装置
【課題】不等間隔配置を3次元アンテナ配置に適用した場合でも、仰角θの独立なモノパルス測角を実現することのできる測角装置を得る。
【解決手段】鉛直方向の線形アレーアンテナの二つのアンテナ素子グループに対応するようにアンテナ素子2,3を二つの領域に分割する。合成部5,6は、これら二つの領域の受信信号について差信号Δと和信号Σを生成する。除算部7は、差信号Δを和信号Σで除算し、測角部8は、除算部7の演算結果を用いて仰角θのモノパルス測角を行う。
(もっと読む)
情報表示装置
【課題】所定の地点の近傍の詳細な情報と当該地点の遠方の情報とを同時に表示可能な情報表示装置を提供する。
【解決手段】レーダ指示器(情報表示装置)は、取得部と、制御部と、を備える。取得部は、移動体(他の船舶)、移動時(航海時)の目印となるランドマーク、及びユーザに登録されたポイント(ユーザ登録ポイント)のうち少なくとも1つからなる表示対象の位置情報を取得する。制御部は、自船の位置情報及び自船の周辺情報をレーダ映像表示領域35aに表示するとともに、表示対象の位置がレーダ映像表示領域35aの外側となる少なくとも1つの表示対象を、表示対象が位置する方向に対応させて、レーダ映像表示領域35aの外周部35bに表示する。
(もっと読む)
移動体の速度計測装置
【課題】移動体の移動速度を検出できる範囲を大きく確保でき、かつ、打撃前後の移動体の移動速度、移動体を打撃する物体の速度を同時に計測する。
【解決手段】ドップラーセンサ14を用いて打撃領域の前方から打撃領域に向かって移動するボール2と、打撃領域でボール2を打撃するバット4と、打撃されたあとのボール2とに向けて送信波W1を送信し、バット4とボール2とで反射された反射波W2を受信してドップラー信号Sdを検出する。ドップラー信号Sdから変換された中間データは蓄積部30に時間経過に従って順番に予め定められた蓄積期間分蓄積される。計測部18は、蓄積部30に蓄積された中間データに基づいて打撃時点を特定し、ボール2がアンテナ12に接近する方向に移動する接近速度、ボール2がアンテナ12から離間する方向に移動する離間速度、バット4の速度である物体速度を算出する。
(もっと読む)
レーダ装置、バス、および乗客移動検出方法、並びにプログラム
【課題】車内を移動中の乗客の有無を検出すること。
【解決手段】レーダ波の反射物の車内における位置情報を、反射が起こった位置およびその位置の反射頻度として取得する位置情報取得部21と、取得した反射頻度を、バスの短手方向に加算する反射頻度加算部22と、位置情報取得部21および反射頻度加算部22による処理を、車内に乗客が乗車していないときに予め行って取得した位置情報を記憶する記憶部23と、位置情報取得部21および反射頻度加算部22による処理を、車内に乗客が乗車しているときに行って取得した位置情報から記憶部23に記憶されている位置情報を減算し、その減算結果として乗客の位置情報を検出する乗客位置検出部24と、乗客位置検出部24が検出した異なる時刻の乗客の位置情報を比較して車内を移動中の乗客を検出する乗客移動検出部25と、を有するレーダ装置1を構成する。
(もっと読む)
41 - 60 / 873
[ Back to top ]