
Fターム[5J070AC13]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 方位 (873)
Fターム[5J070AC13]に分類される特許
81 - 100 / 873
電子走査型レーダ装置、受信波方向推定方法及びプログラム
【課題】精度の良い方位検出ができる電子走査型レーダ装置、受信波方向推定方法及びプログラムを提供する。
【解決手段】同じビート周波数として示される周波数ポイントであって、第1の方位スペクトルを算出した周波数ポイントに対応する周波数ポイントにおいて、第1の方位スペクトルを算出する処理において定めた次数より低い次数に定めた第2の方位スペクトルが算出される。ターゲット抽出部が、第1の方位スペクトルが算出された周波数ポイントに対応する複数のピーク間の相対角度と、第2の方位スペクトルのピークが示すピーク角度とから複数のピーク間の相対レベル差を算出する。そして、電子走査型レーダ装置は、複数のピーク間の相対レベル差に基づいて、ターゲットを検出する。
(もっと読む)
レーダ装置、データ処理方法、及びデータ処理プログラム

【課題】短い観測時間でマルチパス環境下において高度を推定する、レーダ装置、レーダ制御方法、及びレーダ制御プログラムを提供する。
【解決手段】空間に送信信号を送信し、前記空間内の目標物から反射された受信信号を受信する送受信部と、前記受信信号に基づき前記目標物の高度情報を計測する位置計測部と、を備えるセンサ部を複数個備え、分散算出部は、前記複数個の全部又は一部のセンサ部を含む組み合わせ毎に、前記計測された高度情報の分散を算出し、データ選択部は、前記算出した分散が最小となるセンサ部の組み合わせを選択し、選択した組み合わせに含まれるセンサ部が計測した高度情報に基づき前記目標物の高度情報を決定することを特徴とする。
(もっと読む)
干渉除去装置、レーダ装置、及び干渉除去方法
【課題】レーダ映像の分解能を損なわずに、干渉除去する際のメモリ使用量を削減する。
【解決手段】干渉除去装置は、スイープデータ値の数値範囲を区分した複数の級のうち、入力されるスイープデータ値に対応する級を選択する級選択部と、入力されるスイープデータ値と方位方向に隣接するスイープデータ値に対して算出されたフィルタ出力値であって複数の級のいずれかの級により方位方向の相関を示すフィルタ出力値と、級選択部が選択した級とに基づいて、方位方向の相関を示すフィルタ出力値を算出するフィルタ処理部と、フィルタ処理部が算出した入力されるスイープデータ値に対するフィルタ出力値と、予め定められたしきい値とに基づいて入力されるスイープデータ値が干渉であるか否かを判定し、干渉であると判定された場合、予め定められた抑圧値を出力し、干渉でないと判定された場合、入力されるスイープデータ値を出力する干渉抑圧部とを備える。
(もっと読む)
レーダ受信機及びパルスレーダ装置
【課題】パルス受信波が目標物の反射波であるのか、欺瞞妨害波であるのかを正確に識別することができるようにする。
【解決手段】パルス送信波のパルス周波数よりサンプリングレートが高い高速A/D変換器12を用いて、パルス受信波をサンプリングして、そのパルス受信波のパルス波形を検出し、反射波抽出器14,15が、そのパルス受信波のパルス波形からパルス受信波の立ち上がり時間T1及びドループdr1を特定し、そのパルス受信波の立ち上がり時間T1及びドループdr1とパルス送信波の立ち上がり時間T2及びドループdr2を比較することで、そのパルス受信波が目標物の反射波であるのか、欺瞞妨害波であるのかを識別する。
(もっと読む)
物体検出装置及び物体検出方法
【課題】誤結合検出を防止することにより、物体検出精度を向上させることができる、物体検出装置及び物体検出方法を提供すること。
【解決手段】物体検出装置200において、検出物体領域補正部103が、基準画像平面内の座標群と、レーダによって検出された、各座標における検出移動速度とが対応付けられた移動速度マップ情報に基づいて、検出物体領域設定部102によって設定された検出物体領域を補正する。こうすることで、検出物体領域が誤結合の結果として得られたものであっても、その検出物体領域を移動速度マップ情報を用いて修正することができる。この結果、物体検出精度を向上させることができる。
(もっと読む)
電源装置,及びレーダシステム
【課題】レーダ装置において、スイッチングクロックの周波数に対応する周波数ピークを物体として誤検出することを、より確実に防止可能とすること。
【解決手段】レーダシステムは、レーダ波(連続波)を送受信し、そのレーダ波の受信信号に、レーダ波の送信信号を混合することで生成したビート信号をサンプリングしてフーリエ変換(通常、FFT)した結果に基づいて物体情報を生成するレーダ装置と、レーダ装置に電力を供給する電源装置とを備えている。そのレーダシステムでは、物体を検出するために規定された周波数帯域の上限の周波数(即ち、上限周波数fb_max1)よりも高い周波数がナイキスト周波数fNとなるように、ビート信号BTのサンプリング周波数fsを設定する。その上で、電源装置におけるスイッチング周波数fswを、特定帯域、及び折返帯域のうち、いずれか一つの周波数帯域内の周波数に予め設定する。
(もっと読む)
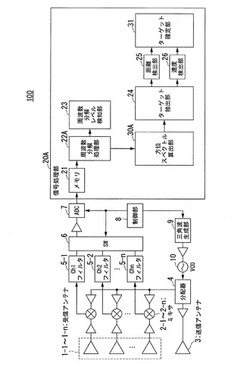
目標検出装置
【課題】小さい演算規模であるにも拘わらず目標の誤検出および不検出を防止できる目標検出装置を提供する。
【解決手段】空中線部1からのレーダ受信信号をA/D変換部2で量子化してデジタルビデオ信号に変換し、コヒーレント積分部3にてコヒーレント積分を行い、距離/方位間引き部4においてデジタルビデオ信号を間引いた後に、減衰部5で減衰マップの減衰レベルに従い信号強度を減衰する。その後、閾値算出/二値化部6で、Pタイル法により、デジタルビデオ信号で示される一定領域内のヒストグラムを作成し、上位P%が閾値を超えるような閾値を使用して二値化を行う。そして、ブランク部7で検出不要領域の信号強度を「0」とし、収縮/膨張部8で収縮処理と膨張処理を行って孤立したクラッタを除去した後、クラスタリング部9で連続する「1」の領域を1つの目標とみなし、検出目標データとして出力する。
(もっと読む)
レーダ装置
【課題】受信アンテナが受信した位相折り返しゴーストを、ビームパターンの異なる電波を送信することによって判定し、レーダ装置の精度向上を図る。
【解決手段】到来波を複数のアンテナで受信した反射波の位相差から物標の角度を算出して物標位置を検出する電子スキャン方式のレーダ装置において、送信アンテナを2本設けてそれぞれからビームパターンの異なる電波を交互に送信し、2つのビームパターンBP1,BP2による反射波を受信した各受信信号から反射波それぞれの到来角度、受信レベル及びレベル差を算出し、受信された反射波の受信レベル差が、到来角度を合わせた上で所定のレベル差以上か否かを判定し、判定結果に応じて反射波の到来角度に実在しない物標を検出するレーダ装置である。2つのビームパターンは送信軸を左右に傾けることによって実現できる。
(もっと読む)
目標検出装置、誘導装置及び目標検出方法
【課題】少ないアンテナ数、低SNRで、目標の動揺がある場合でも、目標のクロスレンジ方向を含む形状を推定することが可能な目標検出装置、誘導装置及び目標検出方法を提供する。
【解決手段】目標検出装置は、レーダ部、主要反射位置抽出部、パワー記録部、変動幅判定部、頻度カウント部及び相対広がり算出部を具備する。レーダ部は、レンジ測定範囲内で有意な振幅を示す複数のレンジ、及び、有意な振幅の振幅値を取得する。主要反射位置抽出部は、レンジ及び振幅値の受信状況に基づき、目標内の主要反射位置を選定する。パワー記録部は、主要反射位置毎の振幅値を処理期間の間記録する。変動幅判定部は、記録された振幅データの変動幅が閾値を超える主要反射位置の振幅データを出力する。頻度カウント部は、出力された主要反射位置の振幅データの変動頻度を計測する。相対広がり算出部は、主要反射位置及び変動頻度から、目標内の位置及び相対的な広がりを求める。
(もっと読む)
管制装置、航空機、及び管制方法
【課題】目標に対する射撃を行うための火器管制を効率良く行うことを目的とする。
【解決手段】航空機10は、データリンク装置24によって、僚機10Bから僚機10Bの移動情報及び僚機10Bが捜索追尾によって取得した目標情報を受信し、自機の移動情報及び自機が捜索追尾によって取得した目標情報を僚機10Bへ送信する。そして、航空機10は、目標割当部54によって、データリンク装置24で受信した僚機10Bの移動情報及び目標情報、並びに自機の移動情報及び自機の捜索追尾によって取得した目標情報に基づいて、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当てる割当処理を行い、割当結果である目標割当指示を僚機10Bへデータリンク装置24によって送信する。
(もっと読む)
気象情報提供システム及び気象情報提供方法
【課題】ドップラエコーがない領域に存在する目標の風向風速情報を取得することができ、目標の離発着時のより品質の高い気象情報に特化した観測を行うことも可能であり、得られた風向風速情報を有効に伝えることができるようにする。
【解決手段】空港観測用に特化した、ブラッグ散乱エコー対応の気象レーダ13を用い、ASR/SSR11で検出される航空機の位置・高度情報に対応する降雨及び風向風速情報を取得し、さらに気象予測モデル処理装置14から位置・高度情報に対応する気象予測情報を取得して、それぞれターゲットレポート情報に付加し、当該レポート情報を管制官、パイロットへ適切に送信する。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、全方位に亘って同一PRIを使用しているため、見通し外となる範囲を含む方位に対しても同一PRIを使用し、時間的リソースを有効に使用できていない。
【解決手段】 この発明のレーダ装置は、自己位置を検出する自己位置検出部と、前記自己位置検出部で検出した自己位置周辺の地形データを記憶する地形データベースと、前記地形データを用い前記自己位置を中心とした方位毎の見通し距離を算出し、当該見通し距離に基き方位毎のPRI(Pulse Repetition Interval)を算出する算出部と、前記方位毎のPRIに基いて、各方位に向けて前記方位に関連付けされたPRIの電波を放射する送信制御部とを備えるようにした。
(もっと読む)
レーダ装置及びカーブ判定プログラム
【課題】前方がカーブしている道路であるか否かを判定する。
【解決手段】電波を送信する送信アンテナ3と、送信された電波が対象物により反射された電波を受信する複数の受信アンテナ11〜1nと、受信された電波の方位毎に対象物と受信アンテナ11〜1nとの相対距離に対する受信された電波の強度の関数を算出するDBF処理部23と、受信された電波の方位毎にDBF処理部23により算出された関数から代表点を抽出する代表点抽出部と、代表点抽出部により抽出された前記受信された電波の方位毎の代表点の距離を比較することにより、前方がカーブしている道路であるか否かを判定するカーブ判定部と、を備える。
(もっと読む)
物体認識装置
【課題】車載カメラのような他のセンサをさらに備えることなく低コストに、車載レーダが受信した反射点群のパターンから認識対象の物体を認識できるようにする。
【解決手段】レーザレーダ2が受信した反射点群のパターンの自車両1に対して反対方向に屈曲したL字状部分を分離処理部6により分離し、分離処理部6が分離したL字状部分が一部を構成する矩形に基づき、物体属性推定部8により認識対象の物体を認識する。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】過去制御サイクルのデータの使用や取得回数の増加による相関行列等の平均処理をしなくても、ターゲットの分離性能を向上できる。
【解決手段】移動体に搭載される電子走査型レーダ装置100であり、送信された送信波を反射したターゲットから到来する受信波を受信する複数のアンテナを含んで構成される受信部と、送信波及び前記受信波からビート信号を生成するビート信号生成部と、ビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、ビート周波数毎に分解された前記ビート信号に基づいた複素数データを算出する周波数分解処理部22と、ビート信号に基づいて算出された複素数データに基づいて、複素数データの初期位相を補正し、補正後の複素数データに基づいて受信波の到来方向を算出する方位検出部28とを備える。
(もっと読む)
車載用のマルチビーム方式レーダ装置、マルチビーム方式レーダ方法およびマルチビーム方式レーダプログラム
【課題】ターゲットに関する検出を高精度に行うことができる車載用のマルチビーム方式レーダ装置を提供する。
【解決手段】車載用のマルチビーム方式レーダ装置101は、送信波を送信し、当該送信波がターゲットによって反射されて到来する受信波を受信するアンテナを構成する複数のビーム素子2−1〜2−Mと、希望の仮想的なアレーアンテナの素子数と素子間隔に対応して、前記複数のビーム素子2−1〜2−Mにより受信した受信波のデータであるビーム素子データをフーリエ変換して、仮想アレーデータを生成し、生成した前記仮想アレーデータに基づいて所定の処理を行う処理部(信号処理部8の方位検出部)と、を備えることを特徴とする。
(もっと読む)
レーダ装置
【課題】本発明は、レーダ装置に係り、追尾対象の物標を正確に検出することにある。
【解決手段】電波を送信する送信手段と、送信手段から送信される電波の反射波を受信し得る受信手段と、受信手段に受信される信号のうちから反射波の信号レベルと反射波以外の信号レベルとを閾値により区別する受信信号レベル判定手段と、受信信号レベル判定手段により区別された反射波を示す信号に基づいて、物標の距離又は方位を検出する物標検出手段と、物標検出手段により検出される距離又は方位の時間的変化量が所定量以下である物標を追尾対象に、かつ、該時間的変化量が該所定量を超える物標を追尾対象外に、それぞれ設定する物標設定手段と、物標設定手段により設定される追尾対象の物標及び追尾対象外の物標に基づいて、受信信号レベル判定手段にて用いる閾値を変更する閾値変更手段と、を設ける。
(もっと読む)
レーダ装置
【課題】互いに隣り合う素子アンテナで受信した信号の位相差を用いてターゲット方位の計測を行なう場合、角度アンビギュイティが発生し、レーダ装置としての有効な測角範囲を狭めてしまう。
【解決手段】複数の素子アンテナにより1つの受信チャンネルを構成する場合、互いに隣り合わない位置関係に配置された複数の素子アンテナRX1−1、RX1−2を同一の受信チャンネルとして組み合わせて信号合成することにより、角度アンビギュイティが発生し始める角度をレーダの視野角よりも可能な限り広角へと追いやり、レーダとして有効な測角範囲を最大限確保することができる。しかも複数の素子アンテナは不等間隔で配置されている。
(もっと読む)
車載用のマルチビーム方式レーダ装置、マルチビーム方式レーダ方法およびマルチビーム方式レーダプログラム
【課題】複数の異なるFOVを切り替えることができ、ターゲットに関する検出を高精度に行うことができる車載用のマルチビーム方式レーダ装置を提供する。
【解決手段】車載用のマルチビーム方式レーダ装置102は、送信波を送信し、当該送信波がターゲットによって反射されて到来する受信波を受信するアンテナを構成する複数のビーム素子2−1〜2−5と、前記複数のビーム素子2−1〜2−5のうちで送受信に使用するビーム素子を切り替えて視野角を切り替える制御部33と、希望の仮想的なアレーアンテナの素子数と素子間隔に対応して、前記制御部33により切り替えられた送受信に使用するビーム素子により受信した受信波のデータであるビーム素子データをフーリエ変換して、仮想アレーデータを生成し、生成した前記仮想アレーデータに基づいて所定の処理を行う処理部(信号処理部8の方位検出部)と、を備えることを特徴とする。
(もっと読む)
レーダ装置
【課題】並走して走行する対向車を正確に検出することができないという問題が生じていた。
【解決手段】本発明のレーダ装置は、物標に対して電波を送信する送信アンテナ(14)と、物標からの反射波を受信する受信アンテナ(15)と、反射波に基づいて、自車両と同じ進行方向に向かって移動する先行車及び先行物標の位置を検出し、先行物標の位置が、先行車の位置を基準とした所定の先行車判定範囲内にある場合は、先行物標は先行車と同一と判定する先行車検出部(35)と、反射波に基づいて、自車両の進行方向と反対の方向に向かって移動する対向車及び対向物標の位置を検出し、対向物標の位置が、対向車の位置を基準とした所定の対向車判定範囲内にある場合には、対向物標は対向車と同一と判定する対向車検出部(36)と、を有し、対向車判定範囲は、先行車判定範囲よりも狭くなるように設定されることを特徴とするレーダ装置。
(もっと読む)
81 - 100 / 873
[ Back to top ]