
Fターム[5J070AC13]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 方位 (873)
Fターム[5J070AC13]に分類される特許
141 - 160 / 873
目標物管理装置および目標物管理方法
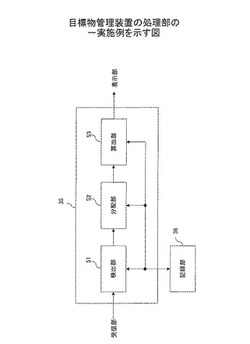
【課題】分解能メッシュと、地域メッシュの重なる面積に応じて地域メッシュの目標物の数量を求め、目標物の数量の管理を向上させる目標物管理装置および目標物管理方法を提供する
【解決手段】目標物が所在しているか否かを検出し、目標物が所在するときは分解能メッシュ各々における目標物の数量を求める検出部と、目標物が所在する第1のメッシュと重なる、監視対象範囲を予め設定した一定の領域で分割した範囲である第2のメッシュを抽出し、抽出された第2のメッシュと重なる目標物が所在する第1のメッシュの目標物の数量を分配し、抽出された第2のメッシュに関連付ける分配部と、地域メッシュ各々に分配された目標物の数量の総和を、地域メッシュ各々で求める算出部と、を備える目標物管理装置である。
(もっと読む)
レーダ装置

【課題】ターゲットが移動する場合でも当該ターゲットからの反射波の信号における低レンジサイドローブ特性を維持し、複数のセクタレーダ間における干渉を低減する。
【解決手段】第1セクタレーダは、第1送信周期で第1符号系列を変調した信号、第2送信周期で第2符号系列を変調した信号、第3送信周期で第1符号系列を変調した信号、第4送信周期で第2符号系列を変調した信号を生成する。第2セクタレーダは、第1送信周期で第2符号系列を変調した信号、第2送信周期で第1符号系列と逆極性の第3符号系列を変調した信号、第3送信周期で第2符号系列と逆極性の第4符号系列を変調した信号、第4送信周期で第1符号系列を変調した信号を生成する。第1、第2セクタレーダは、生成された各信号を第1、第2送信アンテナからそれぞれ送信する。
(もっと読む)
測位方法
【課題】パルスが周期的に出現する場合を想定して、測角値の残差に加えてPRI情報(パルス送信周期)を併用することにより、グルーピングおよび測位精度を向上させた測位方法を得る。
【解決手段】移動プラットホームPから、発信源を有する複数のターゲットT1、T2に関する測角値θ(tk)(k=1、2、・・・、K)を、各発信源にグルーピングして測位するために、発信源からの各パルスに基づく測角値θ(tk)と、各パルスの送信周期に相当するPRI情報とを併用したグルーピングを用いることを特徴とした測位方法である。
(もっと読む)
無線端末方向探知装置
【課題】同周波数帯に干渉電力が存在する場合にも、精度の良い方向探知が可能な無線端末方向探知装置を提供する。
【解決手段】方位角θを変化させつつ(ステップS2、S9)、電力値を検出し(ステップS3)、検出した電力値に基づいて電力値パターンを生成し(ステップS11)、生成した電力値パターンを用いてタグ方向を判定する(ステップS12)。ただし、変調情報が正常に復調できるか否かを判断し(ステップS5)、正常に復調できない場合にはその変調情報に対応する電力値は用いず、補間により電力値パターンを生成する(ステップS11)。これにより、受信電力が大きくても、異なったシステムの無線端末からの電波の干渉が大きい電波を除去して無線端末の方向を探知することができる。よって、誤った方向を探知してしまうことが抑制できる。
(もっと読む)
ボール計測装置およびボール計測方法
【課題】ゴルフボール等のボールの速度、スピン量を容易に計測することができるボール計測装置およびボール計測方法を提供する。
【解決手段】電波反射性を有する第1領域と電波反射率が第1領域よりも低い第2領域とを有するボールに向けて、指向性アンテナで構成されるアンテナにより供給される送信信号に基づいて送信波を送信するとともにボールで反射された反射波をアンテナで受信し、このアンテナで生成された受信信号に基づいてドップラー周波数を有するドップラー信号を作成する工程と、ドップラー信号を周波数解析することにより周波数ごとの信号強度の分布を示す信号強度分布データを作成する工程と、信号強度分布データに基づいてボールの移動速度を算出するとともに前記ボールのスピン量を算出する工程とを有する。ドップラー信号を周波数解析する際に全解析データ数のうち、少なくとも20%のデータにドップラー信号を用い残りのデータを0とする。
(もっと読む)
MIMOレーダシステム、送信装置、受信装置及びMIMOレーダ信号処理方法
【課題】 複数のレーダ装置が遠隔に配置されている場合であっても、各レーダ装置で受信された受信信号を同一の成分同士で処理可能なMIMOレーダシステムと、このシステムで用いられる送信装置、受信装置及びMIMOレーダ信号処理方法とを提供する。
【解決手段】 MIMOレーダシステムは、複数の送信装置と、複数の受信装置と、処理サーバとを具備する。送信装置は、送信信号を送信する。受信装置は、原点及び直交軸をそれぞれが共有し、送信信号が目標で反射等された目標反射波を受信する。受信装置は、極座標信号生成部と、信号処理部と、6次元セルデータ処理部とを備える。極座標信号生成部は、目標反射波に基づいて極座標信号を生成する。信号処理部は、極座標信号を、6次元セルデータに変換する。6次元セルデータ処理部は、6次元セルデータを統合して受信結果を取得する。処理サーバは、前記複数の受信装置からの受信結果に基づいて目標を検知する。
(もっと読む)
移動体の計測方法および計測装置
【課題】移動体の移動方向および移動速度を計測できる範囲を大きく確保でき移動体の移動方向や移動速度を的確に計測する上で有利な移動体の計測方法および装置を提供する。
【解決手段】第1乃至第4のアンテナ12A〜12Dは、指向性を有し、供給される送信信号に基づいてゴルフボール2に向けて送信波W1を送信すると共に、ゴルフボール2反射された反射波W2を受信して受信信号を生成し、互いに離間して配置されている。第1乃至第4のドップラーセンサ14A〜14Dは、ドップラー周波数Fdを有する第1乃至第4ドップラー信号SdA〜SdDを時系列データとして生成する。計測処理部20は、予め得られている各アンテナ12A〜12Dを用いて計測された速度と移動方向および移動速度との実測値との相関関係に基づき、測定された各速度から移動方向および移動速度を算出する。
(もっと読む)
精測進入レーダ及びレーダ表示処理方法
【課題】目標検出処理により検出された目標を運用者が容易に識別できるようにする。
【解決手段】精測進入レーダは、電子走査式空中線1からレーダ波を送信し、その反射波を受信するレーダ送受信機2と、反射波の受信信号をもとに目標を検出し、検出された目標のうち予め決められた上限数以下のターゲットデータを出力する目標検出部33と、受信信号からレーダビデオデータを作成し、目標検出部33により検出された目標の位置情報に基づいて、レーダビデオデータに検出フラグを付加するビデオ作成部32と、レーダビデオデータをもとに検出フラグの有無に応じてレーダビデオの表示態様を変更し、ターゲットデータに基づいてシンボルを重畳表示するレーダ表示部5とを具備する。
(もっと読む)
レーダ装置
【課題】レーダ装置において、自車両の走行環境が閉空間であるか否かを、当該レーダ装置単体で精度良く判定すると共に、物標の認識精度が低下することを防止すること。
【解決手段】取得したビート信号のパワースペクトルを求め(S140)、そのパワースペクトルから検出した周波数ピークに従って物標候補を認識する(S170)。さらに、パワー積分値が基準閾値以上であれば、走行環境が閉空間であるものと判定する(S180)。基準停止物ペアから、規定された方向に沿って接続基準距離の範囲内に存在する停止物ペアを順次接続してグループ化した停止物群によって形成される領域を道路端として認識する(S190)。ただし、接続基準距離は、走行環境が閉空間であれば、走行環境が開放空間であるときに比べて、短い距離に設定される。履歴追尾処理、物体認識処理(S200,S210)により、移動物体を認識する。
(もっと読む)
無線キーシステム及びキー位置判定方法
【課題】 簡単な処理で無線キーが本体の内外のいずれにあるかを正確に判定することができる無線キーシステム及びキー位置検出方法を提供する。
【解決手段】 本体内に備えられた通信装置は、内部アンテナと本体外側に備えられ内部アンテナとは指向性が異なる外部アンテナとにより無線信号を送信し、無線キーは、通信装置から送信された無線信号を互いに異なる指向性を有する複数のアンテナのうちのいずれかを通して受信したことを判別したとき無線キーの移動方向を測定し、複数のアンテナのうちの無線信号を最も高い受信レベルで受信したアンテナを第1のアンテナとして検出し、測定した移動方向と検出したアンテナの指向性とに応じて複数のアンテナのうちから内部アンテナと同一指向性のアンテナを第2のアンテナとして選択し、第2のアンテナで受信した無線信号の受信レベルが第1のアンテナで受信した無線信号の受信レベルより大であるとき無線キーが本体内に存在すると判定する。
(もっと読む)
RFIDタグの動き追跡技術
【課題】RFIDタグの動きを追跡する技術を提供することを目的とする。
【解決手段】
信号強度情報を使用してRFIDタグの動きを追跡する技術である。移動中のRFIDタグから読み取り値の系列を取得するために、RFIDリーダの単一のアンテナが使用されてもよい。信号強度インジケータ(例えば、受信信号強度インジケータ(RSSI))は、読み取り値毎に判定される。RSSIの系列は、RFIDタグの動きの経路と、その経路に沿ったRFIDタグの動きの方向を推定するために使用される。
(もっと読む)
検索システム
【課題】より低コストで検索対象の所在を知ることができる検索システムを提供する。
【解決手段】検索システム1は、検索対象の所在位置に対応付けられて設置されて信号を発信する発信機30と、発信機30の動作を制御するサーバと、発信機から送信される信号を受信する端末装置10と、を有し、端末装置10は、識別コードを送信すると共に発信機30から発信される電波を受信する通信部16と、発信機30からの電波に基づいて識別コードに対応する検索対象の所在位置に関する情報を報知する報知部17と、を備え、サーバ20は、端末装置10から送信された識別コードを受信する通信部26と、識別コードと発信機30とを対応付ける対応付け情報を記憶する記憶装置23と、識別コードと対応付け情報に基づいて当該識別コードと対応付けられた発信機を特定し、特定された発信機を動作させるCPU11と、を備える。
(もっと読む)
目標物探知システム、探知方法、及び探知情報処理プログラム
【課題】レーダ,ソナー,又はライダーから成る送受信機を備えた目標物探索システムにあって、S/N比が低く反射信号が雑音に埋設されそうな環境下にあっても、目標物を有効に捕捉することを可能とした目標物探知システムを提供すること。
【解決手段】方位設定が可能で異なる設置位置にそれぞれ配置された目標物探索用の少なくとも二個の送受信機1,2と、この各送受信機1,2により探索された目標物Mの方位にかかる反射情報に基づいて当該目標物Mの位置を特定する位置算出手段12を備えた主制御装置10とを設け、前記位置算出手段12が、前記二個の送受信機1,2によって得られた目標物Mの方位にかかる情報を、前記各送受信機1,2の位置情報を基準として重ね合わせ処理することにより前記目標物Mの位置を特定する機能を備えていることを特徴とする。
(もっと読む)
アンテナ装置及びレーダ装置
【課題】個々のスロットからの反射の帯域が広く、効率の良いアンテナ装置及びレーダ装置を提供する。
【解決手段】本実施形態によれば、アンテナ装置は、両面が第1及び第2金属膜に覆われた誘電体基板と、前記誘電体基板に2列に配列され、前記第1及び第2金属膜とで導波管線路を形成するスルーホール列と、前記第1金属膜に設けられたペアスロットと、を備える。前記ペアスロットは、スロット長方向が前記導波管線路の線路方向に対して斜めに設けられた第1スロット及び第2スロットを有する。前記第1スロットの中心と、前記第2スロットの中心とが、前記スロット長方向に沿って、前記第1スロットのスロット長さ及び前記第2スロットのスロット長さのうち短い方の2分の1以上離れている。
(もっと読む)
レーダ装置
【課題】測定距離レンジを拡大し、全ての測定距離レンジの測定に必要な測定時間を従来よりも短縮するレーダ装置を提供する。
【解決手段】所定の送信周期で高周波送信信号を送信アンテナから送信し、ターゲットに反射された反射波の信号を受信アンテナで受信する。第1符号長の第1符号系列と、第1符号系列より長い第2符号長の第2符号系列と、第1符号系列の各符号を反転した第3符号系列とのうち、第1送信周期で第1符号系列を変調した第1送信信号を、第2送信周期で第2符号系列を変調した第2送信信号を、第3送信周期で第3符号系列を変調した第3送信信号を、第4送信周期で第2符号系列を変調した第4送信信号を、第1、第3送信周期は第2、第4送信周期よりも短い周期で生成する。この生成された各送信信号を高周波送信信号に変換して送信アンテナから送信する。
(もっと読む)
気象レーダ装置及び気象観測方法
【課題】三次元気象データを時間及び空間的に高解像度で確実に収集可能にすること。
【解決手段】本実施形態に係る気象レーダ装置は、複数のアンテナ素子を鉛直方向に配列したフェーズドアレイ方式のアンテナ11と、パルス送信繰り返し期間(PRI:Pulse Repetition Interval)に、仰角方向の互いに異なる複数の領域に対して複数のビームを放射することによりレーダ電波を送信し、前記ビーム毎の反射波を受信する送受信部13と、前記PRIを前記ビームの全ての反射波の受信期間の終了までの期間とする送信タイミング信号を生成する信号処理部14と、前記送信タイミング信号に従って送信信号を作成する送信制御部15とを具備する。
(もっと読む)
電波発射源推定方向表示装置及び電波発射源推定方向表示方法
【課題】電波発射源による電波を受信した際に、地図上における自己の位置及び自己の位置に対する電波発射源の推定方向を容易に認識することができる電波発射源推定方向表示装置を提供する。
【解決手段】電波発射源からの電波を受信するアンテナ部と、到来方向を推定する到来方向推定処理部7と、アンテナ部の位置情報を取得するGPS受信機10と、アンテナ部の方位情報を取得する方位センサ11と、GPS受信機10により取得された位置情報に基づいてアンテナ部周辺の地図情報を取得するとともに、到来方向推定処理部7により推定された到来方向と方位センサにより取得された方位情報とに基づいてアンテナ部で受信した電波の到来方位を算出し、算出した到来方位とアンテナ部の位置とを取得した地図情報に重ね合わせて出力する地図表示処理部12と、アンテナ部で受信した電波の到来方位及びアンテナ部の位置を示した地図を表示する表示部13とを備える。
(もっと読む)
物体検知装置
【課題】 物体検知手段で検知した物体が、そのまま跨いで走行しても特に支障のない物体であるか、接触を回避する必要がある物体であるかを早期に識別できるようにする。
【解決手段】 送信手段が送信した電波の物体による反射波を受信する受信手段の受信強度をフーリエ変換し、その周波数成分の周波数を第1閾値と比較し、かつ前記周波数成分のパワースペクトルを第2閾値と比較する。自車の走行に対して支障がある停止した先行車からの反射波は受信強度が細かく増減するため、その受信強度をフーリエ変換した周波数成分は、周波数が第1閾値よりも大きく、かつパワースペクトルが第2閾値よりも大きくなることがあり、これにより先行車を判定することができる。この判定は自車から先行車までの距離が大きい状態でも可能であるため、障害物を早期に発見して回避操作を的確に行うことができる。
(もっと読む)
追尾装置
【課題】バイアス誤差推定精度を向上させた追尾装置を得る。
【解決手段】目標Tの動態データを取得する第1のセンサ11と、目標Tの距離、仰角および方位角を取得する第2のセンサ12と、動態データを第2のセンサ12の航跡出力時刻に時刻合わせを行う補正処理部40と、時刻合わせが行われた動態データと第2のセンサ12の航跡とを比較して一致度を出力する一致度判定処理部50と、一致度に基づき、バイアス誤差推定処理部70における予測処理で使用する予測ベクトル算出式を切替える運動モデル設定処理部60と、運動モデル設定処理部60の設定結果に基づき、カルマンフィルタによるバイアス誤差推定処理を行うバイアス誤差推定処理部70と、バイアス誤差ベクトル推定値を蓄積するバイアス誤差データベース80と、バイアス誤差ベクトル推定値を用いてバイアス誤差補正値を算出するバイアス誤差補正処理部90とを備える。
(もっと読む)
部材の位置管理システム及び部材の位置管理方法
【課題】ある部材(特定部材)の位置の特定を行うときに、特定部材の周辺に位置していて特定部材とは異なる他の部材の位置情報を利用することによって、特定部材の位置の管理を行い易くする。
【解決手段】本発明に係る部材の位置管理システム1は、部材IDが記録されたRFIDタグ3と、タグリーダ4と、位置情報データベース5と、この位置情報データベース5を用いて部材2の位置を決定する位置決定手段6とを備えている。タグリーダ4は、位置を特定しようとする部材2である特定部材2aの部材IDと、特定部材2aの周辺に位置していて特定部材2aとは異なる他の部材2bの部材IDとを同時又は異時に取得するように構成されている。位置決定手段6は、タグリーダ4で取得した他の部材2bの部材IDと位置情報データベース5とに基づいて、他の部材2bの位置情報を求め、求めた他の部材2bの位置情報を特定部材2aの位置情報として適用する。
(もっと読む)
141 - 160 / 873
[ Back to top ]