
Fターム[5J070AC13]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 角度 (1,354) | 方位 (873)
Fターム[5J070AC13]に分類される特許
161 - 180 / 873
干渉除去装置、信号処理装置、レーダ装置、干渉除去方法およびプログラム
【課題】干渉信号を正確に除去することを可能とする。
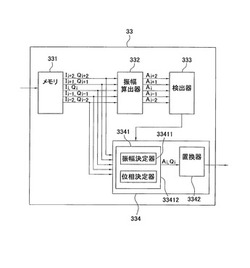
【課題手段】複数の複素受信信号を記憶するメモリ331と、複数の複素受信信号から干渉信号を検出する検出器333と、複数の複素受信信号に基づいて干渉信号を含む複素受信信号の物標信号成分を算出する算出器3341、および、当該複素受信信号を物標信号成分に置き換える置換器3342を有する推定器334とを備え、算出器3341は、複数の複素受信信号の振幅に基づいて物標信号成分の振幅を決定する振幅決定器33411と、複数の複素受信信号の位相に基づいて物標信号成分の位相を決定する位相決定器33412とを有する。
(もっと読む)
レーダ装置

【課題】ターゲットにより反射された信号の直交検波後のI信号とQ信号との間に生じる位相ずれ量をリアルタイム且つ適正に補正し、ターゲットの到来角度の推定精度の劣化を抑制する。
【解決手段】所定の送信周期で高周波送信信号を送信アンテナから送信し、ターゲットに反射された反射波の信号を受信アンテナで受信する。所定の符号長の符号系列を分割したサブ符号長を有する第1、第2サブ符号系列と、第1、第2サブ符号系列にそれぞれ2種類の異なる係数を乗じた第3、第4、第5、第6サブ符号系列とから、第1送信周期では、第3サブ符号系列と第4サブ符号系列とを連結した符号を変調した第1の送信信号を生成する。第2送信周期では、第4サブ符号系列と第5サブ符号系列とを連結した符号を変調した第2の送信信号を生成する。生成された第1及び第2の送信信号を高周波送信信号に変換し、送信アンテナから送信する。
(もっと読む)
航行援助装置
【目的】
本発明は、船舶で航行中に危険物標や他船舶が自船予想針路上に出現または横断する可能性が発生した場合、ARPA(自動衝突予防援助装置)やAIS(自動船舶識別装置)などの装置を通じてレーダより得た危険物標の情報や他船の位置・針路ベクトルなどの情報を取り込み、予想針路との最接近距離と到達時間であるCPA・TCPAを計算し危険シンボルを表示する方法及び装置に関し、予想された針路が安全かどうかを知らせることを目的とする。
【構成】レーダ空中線部より得られた探知物標画像、及び自船情報と他船情報と予想針路情報を用いて演算部にて各予想針路位置におけるCPA・TCPAの演算を行ない、前記演算の結果からアラーム判定を行ない判定の結果に応じた危険シンボルを表示部へ画面表示させる。
(もっと読む)
センサを用いた追突事故防止装置
【課題】速度のみが検出可能な非接触式のミリ波センサの出力情報のみで、追突事故を防止するために運転手に警報を与えるシステムを比較的安価に提供する。
【解決手段】複数のミリ波センサにより、同一方向の目標物との相対速度が測定可能な構成となっていて、かつ各々のミリ波センサの検出範囲を異なるものとし、最も遠くから検出できるミリ波センサから順に判定用の速度閾値を小さくなるようにあらかじめ設定し、各々のミリ波センサで計測した速度がそれぞれ設定された閾値以上であるか判定し、閾値以上であった場合には追突する可能性があると判定するように構成した。
(もっと読む)
レーダ装置及びコンピュータプログラム
【課題】アンテナの指向性制御によらずに、検知した対象物が上方構造物であるか否か判別する。
【解決手段】電波を送信する送信アンテナ3と、送信された電波が対象物により反射された電波を受信する受信アンテナ1nと、受信された電波を所定の時間間隔で取得する受信波取得部7と、受信波取得部7の取得回数の関数として、受信された電波の電力を算出する受信電力算出部22と、関数から複数の代表点を抽出する代表点抽出部28と、代表点に基づいて対象物を前記受信アンテナの光軸より高い位置にある上方構造物であるか否か判定する判定処理部29と、を備える。
(もっと読む)
閾値設定方法、物標探知方法、閾値設定装置、物標探知装置、閾値設定プログラム、および物標探知プログラム
【課題】不要成分と物標とを識別する閾値を、物標の有無に影響されずに自動で設定する。
【解決手段】注目の距離位置[n]のエコー信号のレベルEcho[n]が、閾値レベルTh[n]よりも低ければ、注目の距離位置[n]の閾値レベルTh[n]を低く更新設定する。エコー信号のレベルEcho[n]が、閾値レベルTh[n]よりも高く、閾値レベルTh[n]が注目の距離位置[n]に対してアンテナ側に隣接する距離位置[n−1]の閾値レベルTh[n−1]よりも高ければ、閾値レベルTh[n]を低く更新設定する。エコー信号のレベルEcho[n]が閾値レベルTh[n]よりも高く、閾値レベルTh[n]が注目の距離位置[n]に対してアンテナ側に隣接する距離位置[n−1]の閾値レベルTh[n−1]よりも低ければ、閾値レベルTh[n]を高く更新設定する。
(もっと読む)
閾値設定方法、物標探知方法、閾値設定プログラム、物標探知プログラム、および物標探知装置
【課題】不要成分と物標とを識別する閾値を、物標の有無に影響されずに自動で設定する。
【解決手段】注目の距離位置[n]のエコーレベルEcho[n]と、近接位置[n−1]のエコーレベルEcho[n−1]との差分値diff[n]を算出する(S101)。差分値diff[n]が閾値γよりも高ければ(S102:Yes)、注目の距離位置[n]のエコーレベルEcho[n]と閾値レベルTh[n]とから新たな閾値レベルTh[n]を設定する(S105)。一方、差分値diff[n]が閾値γ以下であれば(S102:No)、注目の距離位置[n]のエコーレベルEcho[n]と閾値レベルTh[n]、および近接位置[n−1]の閾値レベルTh[n−1]とから新たな閾値レベルTh[n]を設定する(S106)。
(もっと読む)
イベント検出装置
【課題】電波の状態を監視することによって、そこに存在する人や物の状態の違いをも識別することができる高い精度を持つイベント検出装置を提供すること。
【解決手段】送信機が送信した電波を受信する複数のアンテナ21と、該複数のアンテナ21によって受信した信号を受信ベクトルとして該受信ベクトルから相関行列を演算する相関行列演算手段22と、該相関行列演算手段22によって演算された相関行列を固有値展開して信号部分空間を張る固有ベクトルを演算する固有ベクトル演算手段23と、該固有ベクトル演算手段23によって演算された固有ベクトルを入力して状態を判別するSVM(サポートベクターマシン)24と、SVM24の出力の連続性を考慮してイベントを検出するイベント検出手段25と有するイベント検出装置。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】ARモデルの適切な次数設定と精度の良い方位推定により受信波の到来方向の検出を行う電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供する。
【解決手段】周波数分解処理部がビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、ビート周波数毎に分解されたビート信号に基づいた複素数データを算出する。方位検出部がビート信号に基づいて算出された複素数データを要素とする第1の次数の行列の固有値の値に基づいて正規方程式の次数を推定し、該推定された第2の次数の正規方程式を作成し、該作成された第2の次数の正規方程式に基づいて前記受信波の到来方向を算出する。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】干渉以外のエコーに対する抑圧を低減しつつ、干渉成分を的確に除去することができる信号処理装置を提供する。
【解決手段】空間フィルタ172は、例えば鮮鋭化フィルタ等からなり、複数の過去のエコー信号を画像メモリ16から読み出し、注目サンプルの鮮鋭化を行う。例えば、注目サンプルy’(i,j)を囲む8画素のエコー信号を含む9画素についてのエコー信号を画像メモリ16から読み出し、鮮鋭化処理を行う。そして、相関処理部17は、画像データ生成部15から入力された最新のデータと、空間フィルタ処理後の過去のデータと、の重み付け加算を行う。
(もっと読む)
信号処理装置、レーダ装置、車両制御システム、および、信号処理方法
【課題】連続性判定おいて検知点を適切に処理することを目的とする技術を提供する。
【解決手段】ピーク信号の組み合わせを誤ったペアリングで検出された可能性のある検知点を特定検知点とし、この特定検知点に特定された過去検知点と、他の過去検知点とで減算する減算値を変更する。これにより、過去検知点が特定検知点に特定された過去検知点か他の過去検知点かに応じてメモリからの削除のタイミングを調整できる。
(もっと読む)
監視装置、方法及びプログラム並びに監視システム
【課題】
バードストライクの危険のある鳥の接近を監視し、警告する。
【解決手段】
レーダ装置(10)が、周囲を走査して得られるレーダ画像データを周期的に出力する。コンピュータ(30)で動作する監視プログラムの背景生成機能(32a)が、複数シーン数のレーダ画像データから背景画像データを生成し、背景除去機能(32c)が、その後のレーダ画像データから背景画像データを除去する。2値化機能(32d)がエコー画像を2値化し、中心決定機能(32e)が各エコー画像の中心を決定し、雨雪除去機能(32f)が、雨雪を除去する。追跡機能(32g)は、複数シーンの前雪除去結果から、鳥を追跡する。警告機能(32h)は、鳥が所定領域に入ると警告を出力する。
(もっと読む)
レーダ情報処理装置及びレーダ情報処理プログラム
【課題】管制対象とする航空機目標を速やかに自動追跡に移行できるようにする。
【解決手段】レーダ情報処理装置3は、ASR/SIF(SSR)装置1から第1の更新レートで更新される第1のレーダ情報を受信し、PAR装置2から上記第1の更新レートより高い第2の更新レートで更新される第2のレーダ情報を受信し、第1のレーダ情報と航空機の飛行計画情報とを対応付ける第1の相関処理部31と、第1のレーダ情報をもとに第1の更新レートより短い周期で航空機の位置を予測する追跡処理部32と、追跡処理部32により予測された位置をもとに第1のレーダ情報と第2のレーダ情報とを対応付ける第2の相関処理部とを備える。
(もっと読む)
レーダ装置、アンテナ制御方法、及びプログラム
【課題】アンテナ開口の方位の変更動作を行う際に、消費電力を抑えつつ、追尾を継続する。
【解決手段】アンテナ開口の方位の変更のために空中線部1−3を駆動させると、空中線部1−2のビーム走査範囲の端から空中線部1−3のビーム走査範囲の端までの範囲が、走査されない範囲となる。空中駆動部1−3を駆動させている間、空中駆動部1−3の駆動によって発生する走査されない範囲をカバーし、かつ空中駆動部1−2、1−3同士のビームの走査範囲が重複しないように、空中駆動部1−2、1−3のそれぞれのビームの走査範囲を逐次変更する。
(もっと読む)
レーダ装置
【課題】多面構造を有するフェーズドアレイ方式のレーダ装置において、いずれかの放射面が故障した場合等にも対処可能な高信頼性や運用面における多機能性を備えたレーダ装置を提供する。
【解決手段】非回転のフェーズドアレイ方式により全周方向についての捜索が可能なレーダ装置であって、フェーズドアレイアンテナによる複数のアンテナ面(空中線1a,1b,1c,1d,1e,1f)が多面体を形成するとともに、所定の方角を複数のアンテナ面のうち少なくとも2つのアンテナ面が捜索可能な覆域に含む空中線部と、空中線部が有する複数のアンテナ面のいずれかを選択し、選択したアンテナ面を介して送信信号を送信するとともに受信信号を受信する1以上の送受信機2と、1以上の送受信機2の各々に対応して設けられ、送受信機2により受信された受信信号に基づいて受信ビームを形成する1以上のビーム形成部3と、ビーム形成部3により形成された受信ビームに基づいて信号処理することで目標検出を行うレーダ信号処理部4とを備える。
(もっと読む)
レーダ装置
【課題】目標が予め分かっていない状態でも瞬時に受信電力が最大となる最適偏波が送信可能な偏波制御型のレーダ装置を得る。
【解決手段】レーダ装置は、異なる偏波状態を有する複数の信号が送信可能なアレーアンテナと、異なる偏波状態の信号をアレーアンテナに出力する2つの送信機と、異なる偏波状態の受信信号として出力する2つの受信機と、2つの受信信号それぞれに対して直交符号との相関に基づいて各偏波成分を分離する符号分離手段と、2つの受信機のいずれかを符号分離手段に接続する第2の切換手段と、各偏波成分を用いて受信電力が最大となる偏波状態を推定する偏波推定手段と、受信電力が最大となる偏波状態に基づいて送信機から送信される信号の偏波状態を制御する偏波制御手段と、を備え、前記アレーアンテナから同時に同一周波数の複数の信号が送信される。
(もっと読む)
物体検出装置
【課題】従来に比して物体を正確に検出可能とする物体検出装置を提供する。
【解決手段】自車両周辺の物体を検出する物体検出装置であって、自車両に搭載され、検知領域内に存在する物体を検出する物体検出手段と、少なくとも自車両が走行する道路の周辺に存在する障害物の位置情報を外部から取得する周辺情報取得手段と、物体検出手段の検知領域を周辺情報取得手段によって取得した障害物の位置情報に応じて変更する検知領域変更手段とを備える物体検出装置である。
(もっと読む)
信号処理装置、レーダ装置、信号処理方法、および信号処理プログラム
【課題】干渉以外のエコーに対する抑圧を低減しつつ、干渉成分を的確に除去することができる信号処理装置を提供する。
【解決手段】スイープ間のレベル変化(例えば差分値)を検出し、基準パターンに照合してレベル変化パターンを出力する。スイープデータx(n)に対して、スイープデータx(n+1)が大きくなるパターン(パターンP)、スイープデータx(n)に対して、スイープデータx(n+1)が小さくなるパターン(パターンN)、それ以外のパターン(パターンZ)に分類する。干渉検出部153は、レベル変化パターンのうち少なくとも2つのレベル変化パターンに基づいて干渉を判定する。例えば、注目スイープデータx(n)の1つ前のスイープデータx(n−1)との変化パターンがパターンPであり、1つ後のスイープデータx(n+1)との変化パターンがパターンNである場合、干渉であると判定する。
(もっと読む)
先行車検出装置
【課題】2WS基準システムまたは4WS基準システムにおけるオフセット値に対して、さらに自車に適合する差分量を加算することによって、カーブ路における自車線上の先行車を精度よく検出できる先行車検出装置を提供する。
【解決手段】本発明の先行車検出装置は、自車の車両情報に基づいて当該自車が2WS車か4WS車かを判定する車両判定手段と、自車の前方にある物標の横位置情報を取得する横位置情報取得手段と、2WS車または4WS車に応じて横位置情報を自車のカーブ路における車体スリップ角が0度である直線走行方向基準の横位置情報に換算するオフセット値を算出するオフセット値算出手段と、オフセット値に基づいて横位置情報を直線走行方向基準の横位置情報に換算する直線走行方向基準換算手段と、直線走行方向基準の横位置情報に基づいて自車の前方にある物標が自車の前方にある先行車であるか否かを判定する先行車判定手段とを備える。
(もっと読む)
航法支援装置
【課題】本発明は、複数のフィルタを併用することにより目標の位置、距離、速度、方位の何れかを得る航法支援装置に関し、構成が大幅に複雑化することなく、精度を高めることを目的とする。
【解決手段】目標から到来した受信波に基づいて前記目標の位置、距離、速度、方位の全てまたは一部の予測および推定を個別に行う複数N個のフィルタと、前記目標の特徴を得る特徴識別手段と、前記複数N個のフィルタ毎に特性が前記特徴に整合するほど値が大きく、かつ前記複数Nのフィルタに個別に対応する重みW1〜WNを設定する重み設定手段と、前記複数のフィルタによって行われた推定の結果と前記重みW1〜WNとの積和として前記目標の位置、距離、速度、方位の全てまたは一部を得る重み付け手段とを備える。
(もっと読む)
161 - 180 / 873
[ Back to top ]