
Fターム[5J070AC15]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 移動方向(センス) (168)
Fターム[5J070AC15]の下位に属するFターム
距離の変化によるもの (23)
信号位相の進・遅によるもの (12)
2ミキサを物理的に離したもの (6)
Fターム[5J070AC15]に分類される特許
21 - 40 / 127
反射型侵入監視装置
【課題】電子機器から発生するスイッチングノイズ等の影響を受けることなく、侵入者を確実に検知することができる反射型侵入監視装置を提供する。
【解決手段】送信部10は送信アンテナ21からマイクロ波を検知エリア20へ送信する。受信部30は検知エリア20に侵入した対象物22からの反射波を受信アンテナ23で受信し、周波数変換回路40にて受信信号frをローカル信号flo、ftと混合して中間周波数fifに変換する。周波数検波回路50は、中間周波数fifを中間周波信号IF2に変換して周波数検波する。AFC電圧生成回路54は、反転直流増幅器61で増幅された検波電圧bと予め設定したしきい値と比較し、検波電圧bがしきい値を超えない範囲では周波数検波部51内の周波数変換部の周波数制御を行い、検波電圧bがしきい値を超えると上記周波数変換部の周波数制御を停止する。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム

【課題】演算負荷の重い計算処理を用いることなく、ARスペクトル推定法におけるパラメータに基づいて、適当なモデル次数を設定する電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供する。
【解決手段】送信波及びターゲットから到来する受信波からビート信号に基づいた複素数データを算出する周波数分解処理部と、ビート周波数の強度値からピーク値を検出してターゲットの存在を検知するターゲット検知部と、アンテナ毎に、前記ターゲットの存在が検知されたビート周波数である検出ビート周波数の複素数データに基づいて生成される異なる次数の正規方程式であって、該正規方程式に基づいて導かれる受信波数に応じて選択された次数の正規方程式に基づいて受信波の到来方向を算出する方位検出部とを備える。
(もっと読む)
移動体検知システム及び移動体検知表示装置
【課題】車両等の移動体を検知する移動体検知システムにおいて、移動体に適切な移動方向を指示する。
【解決手段】車両等の移動体を検知する移動体検知システムにおいて、移動体検知手段(例えば、ミリ波レーダ装置)が検知範囲に存在する移動体を検知し、進行方向決定手段が前記移動体検知手段により検知された移動体に対して表示する進行方向を決定し、表示手段が前記移動体検知手段により検知された移動体に対して前記進行方向決定手段により決定された進行方向の情報(例えば、移動体を誘導するための矢印の情報)を表示する。
(もっと読む)
データ処理装置、動作認識システム、動作判別方法、及びプログラム
【課題】ドップラーセンサを用いて、加速度の大きさに依存せず対象物の動作を認識することが可能なデータ処理装置、動作認識システム、動作判別方法、及びプログラムを提供する。
【解決手段】データ処理装置100は、認識対象物20に対して放射した電磁波である放射波の周波数と、上記放射波が上記認識対象物により反射した反射波の周波数との差分の周波数を有するドップラーセンサ出力信号を取得するデータ取得部102と、上記ドップラーセンサ出力信号の特徴を示す特徴量を抽出する特徴量抽出部106と、上記特徴量に基づいて、上記認識対象物の動作を判別する動作判別部108と、を有する。
(もっと読む)
水面形状計測装置、及び水面形状計測方法
【課題】設置や運用が比較的容易な観測機器を用いて、海洋等の水面形状を測定できる水面形状計測装置、及び水面形状計測方法を提供する。
【解決手段】水面に対してパルス状マイクロ波を放射し、その後方散乱波を予め定めたタイミングごとに複数回受信し、複数の計測点ごとの後方散乱波を検出して、各後方散乱波に対応する複数のドップラー信号を出力するレーダー部10を複数備える。レーダー部10の各々が出力する複数のドップラー信号により、各レーダーのパルス状マイクロ波放射方向に沿って配される、複数の計測点での水面での水粒子の運動の情報を生成し、また各レーダー部10のパルス状マイクロ波放射方向と波浪の進行方向とのなす角を表す情報に基づいて、波浪の進行方向を決定する。
(もっと読む)
無線センサ装置
【課題】主に近距離にある対象物を測定対象とする場合に、他の無線通信システムに与える妨害と他の無線通信システムから受ける妨害の双方を低減できる無線センサ装置を提供すること。
【解決手段】この無線センサ装置は、送信周波数が所定周期で連続的に増加及び減少するように周波数拡散された高周波送信信号を生成してアンテナと15から放射すると共に、対象物からの反射波を受信して周波数拡散された高周波受信信号をアンテナ15出力する。ミキサ回路16に高周波送信信号と、それに対する高周波受信信号とを入力し、ミキサ回路16が双方の周波数が一致したところで位相検波器として動作してDCビート信号を出力するので、そのDCビート信号をローパスフィルタ17で抽出し、DCビート信号の変動から対象物Mの動きを検出する。
(もっと読む)
画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム
【課題】移動する物標を固定物標と区別して表示できる機能を簡易な構成で実現できる画像処理装置を提供する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、真航跡用画像メモリ42と、移動物標判定処理部44と、を備える。移動物標判定処理部44は、真航跡用画像メモリ42に記憶される物標の絶対的な位置変化を示す真航跡データ群から、他船の航跡を示す画素情報の値であって、所定の条件を満たす画素情報の値を有するトリガ画素を探索する。そして、移動物標判定処理部44は、トリガ画素から、物標が存在することを示す所定値が画素情報として設定されている画素まで所定方向で連続する一連の画素において、画素情報の値が、トリガ画素の画素情報の値から所定値に近づく傾向を示している場合に、所定値が設定される画素を移動物標が存在する画素位置と判定する。
(もっと読む)
画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム
【課題】画像処理装置において、物標の接近を検出する簡素な構成を実現するとともに、接近物標が存在することをオペレータが直感的に把握できるように画像処理を行う構成を実現する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、相対航跡用画像メモリ32と、相対航跡判定処理部33と、を備える。相対航跡用画像メモリ32は、当該レーダ装置5に対する物標の相対的な位置変化を示す相対航跡データ群として記憶可能に構成される。相対航跡判定処理部33は、相対航跡用画像メモリ32に記憶される相対航跡データ群のうち、同じスイープライン上に存在する画素の相対航跡データに基づいて、自船(レーダ装置5)に接近する接近物標を検出する。
(もっと読む)
レーダ波浪解析装置
【課題】波浪情報の解析精度を向上する。
【解決手段】レーダ波浪解析装置10は、レーダ12の回転により得られる海面反射信号に対して2次元FFT処理を行うことにより2次元の波浪スペクトルを求める2次元演算手段16と、レーダ12の観測領域30での水深dに基づき作成され、観測領域30での浅海変形の影響を受けた海面反射信号に対応する波浪スペクトルを補正するための補正マップ20と、2次元演算手段16から出力された波浪スペクトルを補正マップ20で補正し、補正後の波浪スペクトルに基づいて観測領域30での波浪情報を取得する波浪情報取得手段25とを有する。
(もっと読む)
物体検出装置
【課題】レーダ装置が検出した物体について、衝突判断の対象物とする必要があるか否かの判断を適切に行うことのできる物体検出装置を提供する。
【解決手段】物体検出装置は、車両の周辺の物体を検出する検出手段と、検出手段が検出した物体について、当該物体の進行方向、当該進行方向から算出される物体の存在位置、および進行方向を示す直線と車両の中心軸とがなす角である進入角度を示す車両情報を算出する処理手段と、車両から車幅方向に沿った物体までの側方距離および進行方向を示す直線と車両の中心軸とがなす角の角度に基づいて予め設定された判定範囲を示す判定情報を記憶する記憶手段と、処理手段が算出した車両情報を用いて、存在位置および進入角度が判定範囲内であるか否かに基づいて物体を車両と衝突の危険性判断の判断対象である衝突判定対象物とするか否かを判定する判定手段とを備える。
(もっと読む)
自動車用衝突モニタ方法および装置
本発明は、所定の周辺領域がモニタリングされる、自動車用衝突モニタ方法に関するものである。本方法は、前記周辺領域内に存在する少なくとも1つの物体の位置データおよび運動方向データを提供するステップ(S1、S5)と、車両構成部品の少なくとも1つの位置およびドライバーの所望の走行方向の少なくともいずれかを与える車両情報を提供するステップ(S2)と、前記車両情報に基づいて物体が自動車に対して衝突危険を与えないことが決定された場合、該物体を識別するステップ(S4)と、位置データおよび運動方向データに基づいて識別されない物体の自動車への接近が検出されたとき、衝突危険を警報するステップ(S8)とを含む。 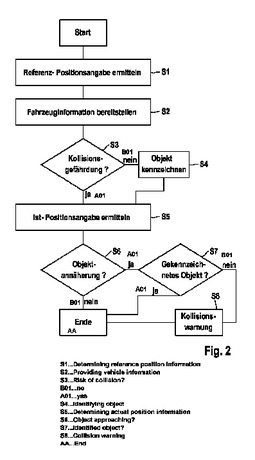 (もっと読む)
(もっと読む)
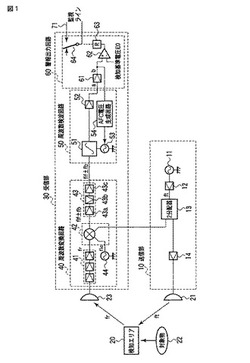
電波センサ
【課題】検知領域内に存在する被検知体の有無や移動状態を精度良く検出する、S/N比に優れた低消費電力、且つ小型の電波センサを提供する。
【解決手段】高周波信号を生成する発振回路1と、誘電体からなる基板2の一方の表面または内部の略全面に形成された高周波信号のグランドとして作用する接地電極3と、他方の表面に形成された、高周波信号を受信または送受信するアンテナ電極(受信電極5または送受信電極6)と、何れか一方の端子がアンテナ電極の周波数を調整する周波数調整線路12を介してアンテナ電極に接続され、他方の端子が接地電極3に接続された、アンテナ電極にて受信した高周波信号を検波する検波素子7と、検波素子7にて検波された検知信号を外部に出力する出力線路8と、検波素子7から出力される検知信号の電圧値を調整する電圧調整手段9とを備え、電圧調整手段9は、前記アンテナ電極が励振した時に生じる電界が略最小となるアンテナ電極の位置に直接または前記出力線路を介し接続される。
(もっと読む)
移動物体検出装置
【課題】昆虫などの小型の移動物体の誤検出を容易に防止できる。
【解決手段】判定回路89は回転角の積算値と小型移動物体O1が受波範囲A1を通過する際に同一方向に移動する移動距離に対応して設定された閾値とを比較し、積算値が閾値未満であるときは移動物体無しと判定する。さらに判定回路89は継続時間Txと小型移動物体O1が受波範囲A1を通過する際に要するであろう時間に対応して設定された基準時間とを比較し、継続時間Txが基準時間未満であるときは移動物体無しと判定する。故にドップラー信号E,E’の継続時間Txだけではなく、ドップラー信号E,E’から算出される移動物体の移動方向や移動距離も考慮して判定するので、受波器4の近傍における受波範囲A1を移動する小型移動物体O1の誤検出を容易に防止できる。
(もっと読む)
動態監視システム
【課題】RFIDタグを利用した認証のセキュリティー性を向上することができる動態監視システムを提供する。
【解決手段】認証位置まで通じる複数の経路に沿って複数設けられた受信装置を介して、RFIDタグが送信するRFID用情報を読取るRFID読取り部と、受信装置の各々がRFID用情報を受信した時刻の差に基づいて、複数の経路の中からRFIDタグの移動軌跡を特定して蓄積する移動軌跡蓄積部と、RFID用情報が、複数の経路の中から選択された認証用軌跡情報とRFID用情報とは異なる個人認証用情報とに対応して予め記憶されている記憶部と、認証位置で個人認証用情報を用いて認証操作が行われた場合に、移動軌跡蓄積部に蓄積されたRFIDタグの移動軌跡と記憶部に記憶されている認証用軌跡情報との比較結果に基づいて、個人認証を行う認証部とを備えた。
(もっと読む)
レーダ装置
【課題】クロスレンジプロフィールを用いた類別判定において、目標の観測条件(距離、速度、進行方向)によってクロスレンジ分解能が変化することにより、類別判定結果の信頼性が大きく変化するという運用上の課題がある。
【解決手段】追尾情報から得られた目標の観測条件と、所望のクロスレンジ分解能から、所望のクロスレンジ分解能を得るために必要となる目標観測時間を算出し、これに基づき捜索ビーム及び類別ビームのビームスケジューリングを行う。
所望のクロスレンジ分解能を得るために更に長い目標観測時間が必要な場合は、類別ビームを分割送信することによりクロスレンジ分解能を向上させ、目標の観測条件によらずクロスレンジ分解能を一定にすることにより、類別判定結果の信頼性を一定に保つ。
(もっと読む)
センサ装置
【課題】十分な省電力化を図ることができると共に、簡易な構成で生産コストを低減することができるセンサ装置を提供すること。
【解決手段】信号を出力する共振回路3と、共振回路3を間欠的に共振させる励振信号を発生する励振信号発生回路2と、共振回路3から出力された信号を対象物Oに送信すると共に、対象物Oに反射された信号を受信する送信アンテナA1および受信アンテナA2と、共振回路3から出力された信号と対象物Oに反射された信号とを混合する混合回路4とを備え、混合回路4から出力された信号に基づいて対象物Oの動きの有無を検出する構成とした。
(もっと読む)
レーダ装置、目標同化判定処理方法およびプログラム
【課題】非同期に走査を行う1次レーダおよび2次レーダにおいて捕捉した目標の同化判定処理を容易に行うこと。
【解決手段】1次レーダ10と、この1次レーダ10と走査速度が非同期の2次レーダ11とを備えるレーダ装置1において、1次レーダ10が捕捉した目標Tの位置における目標Tの移動速度および移動方向の情報に基づき1次レーダ10が目標Tを捕捉していない期間における目標Tの位置を推定する航跡追尾部12と、2次レーダ11が目標tを捕捉した時刻に対応する航跡追尾部12が推定した目標Tの位置が目標tの位置と所定の関係にあるときに、目標tと航跡追尾部12が位置を推定する基となった目標Tとが同一のものであると判定する目標同化判定部としてのデータ処理部13とを備える。
(もっと読む)
電波センサ
【課題】センサ前方に存在する被検知体の有無や移動状態を精度良く検出する、S/N比に優れた低消費電力、且つ小型の電波センサを提供する。
【解決手段】送信信号を生成する発振回路9と、誘電体からなる基板1の一方の表面または内部の略全面に形成された送信信号のグランドとして作用する接地電極2と、他方の表面に形成された、送信信号を電波ビームとして前方に放射し、被検知体に衝突し反射して戻ってきた電波ビームを受信信号として受信する矩形状の送受信電極31と、何れか一方の端子が接地電極2のみに接続され、送受信電極31にて受信した受信信号を検波する検波素子5と、検波素子5にて検波された受信信号を外部に出力する出力線路6とを備え、検波素子5の他方の端子と出力線路6は送受信電極31の異なる位置に各々、接続される。
(もっと読む)
レーダ装置、海洋レーダ観測装置およびドップラ周波数データ算出方法
【課題】変化の速い表層流速を検出可能とする。
【解決手段】処理部25は、受信データDrを方位分解処理して第1振幅データを算出し、この第1振幅データに対して、掃引周期のn周期分ずつをn未満の任意の掃引周期でオーバーラップさせつつグループ化し、グループ毎に、第1振幅データに対して掃引周期単位でフーリエ変換を施して所定方向における所定距離毎の振幅を示す第2振幅データを掃引周期単位で算出し、第2振幅データの各グループに対して、各グループに含まれている各第2振幅データを掃引周期順で所定距離毎に並び替えてグループ化し、並び替え処理によってグループ化された第2振幅データに対して、グループ毎に振幅がゼロを示すゼロデータを所定数ずつ付加して新たな第2振幅データとし、ゼロデータが付加された第2振幅データに対してフーリエ変換を施して所定距離毎のドップラスペクトルDdp1,Ddp2を算出する。
(もっと読む)
位置情報解析装置、位置情報解析方法、位置情報解析システムおよびプログラム
【課題】無線ICタグの位置情報を高い精度で解析することができる位置情報解析装置を提供する。
【解決手段】位置情報解析装置10は、光学的に識別可能なマーカ21と、IC情報を無線通信により送信するICタグ22と、を一体的に有する識別タグ20との間で無線通信し、ICタグ22からIC情報を含む無線信号を受信する無線通信部111と、無線通信部111が識別タグ20と通信可能な領域の全部または一部を示す画像データを取得する画像取得部113と、画像データに含まれるマーカ21の画像の位置を解析することによりマーカ21の位置を特定し、特定されたマーカ21の位置を示す詳細位置情報を生成し、詳細位置情報を識別タグ20の位置情報として求める画像解析部114と、を備えてもよい。
(もっと読む)
21 - 40 / 127
[ Back to top ]