
Fターム[5J070AC15]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 移動方向(センス) (168)
Fターム[5J070AC15]の下位に属するFターム
距離の変化によるもの (23)
信号位相の進・遅によるもの (12)
2ミキサを物理的に離したもの (6)
Fターム[5J070AC15]に分類される特許
41 - 60 / 127
車両探索システム
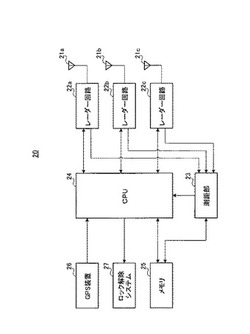
【課題】携帯機を小型化すること。
【解決手段】車両側装置20は、車両の異なる位置に設けられた3本のアンテナ21と、各アンテナ21から所定の周波数の送信信号を送信すると共に携帯機30から返信される返信信号を受信し、送信した各送信信号及び受信した各返信信号とを比較して各アンテナ21と携帯機30との距離情報を測定するレーダー回路22と、測定した距離情報から車両側から見た携帯機30の方角又は当該携帯機30から見た車両の方角を表す方位情報を検出する方位検出手段24とを備え、方位情報を含んだ情報を携帯機30へ送信する。携帯機30は、1本のアンテナと、車両側装置20から送信された送信信号を受信して送信信号と同期した返信信号を送り返すと共に、車両側装置20から送信された方位情報を含んだ情報を受信するトランスポンダと、方位情報に基づいて車両の方向に関する情報を出力する情報出力手段と、を備えた。
(もっと読む)
物体検出装置および物体検出方法

【課題】レーダ装置が検出した物体を精度良くグループ化することのできる物体検出装置および物体検出方法を提供する。
【解決手段】物体検出装置は、車両周辺の物体を検出することによって得られた捕捉点を示す信号を用いて、当該捕捉点それぞれの移動方向を算出する移動方向算出手段と、予め検出対象となる物体の形状に応じた枠および当該物体で想定されている進行方向として当該枠に進行基準方向を設定し、上記捕捉点のうち、上記移動方向に当該進行基準方向を合わせた当該枠内に存在する捕捉点を同じ物体の捕捉点として判定する判定手段とを備える。
(もっと読む)
センサ装置、入力装置及び制御方法
【課題】非接触で検出対象の多次元的な動きを検出することが可能なセンサ装置、これを備えた入力装置及び制御方法を提供する。
【解決手段】本発明の一形態に係るセンサ装置10は、アンテナパネル11と、発振回路12と、測定回路13と、演算回路14と、制御コマンド生成回路15とを有する。アンテナパネル11は、X方向及びY方向に配列された複数のアンテナ部111X、111Yを有する。発振回路12は、上記複数のアンテナ部と検出対象との間の距離に応じて異なる発振周波数を有する検出信号を出力する。測定回路13は、上記検出信号の周波数変化を測定する。演算回路14は、上記測定回路13によって測定された検出信号の周波数変化に基づいて、上記複数のアンテナ部の各々と上記検出対象との間の距離と、X、Y方向に沿った検出対象の動きに関する量とを算出する。
(もっと読む)
物体までの距離及び物体の速度のうちの少なくとも一方を求める方法、並びに物体までの距離及び物体の速度のうちの少なくとも一方を求める装置
【課題】効率的に又は実効的に、マルチユーザのシナリオにおいて動作するFM−CWレーダを提供する。
【解決手段】物体が近づいてくるか、又は離れていくかの指示を判断すること、並びに、周波数が一定であるセグメント及び周波数が変化するセグメントから成るシーケンスを含む呼掛け信号を生成することを含む。物体が近づいてくることを上記判断するステップが指示する場合には、該周波数が変化するセグメントの周波数が減少し、物体が離れていくことを上記判断するステップが指示する場合には、該周波数が変化するセグメントの周波数が増加する。呼掛け信号を送信し、物体から反射される呼掛け信号の反射信号を検出する。次に、呼掛け信号及び呼掛け信号の反射信号の組み合わせを用いて、物体までの距離及び物体の速度のうちの少なくとも一方を求める。
(もっと読む)
電波センサ
【課題】センサ前方に存在する被検知体の有無や移動状態を精度良く検出する、電波ビームの放射方向を制御しS/N比に優れた低消費電力、且つ小型の電波センサを提供する。
【解決手段】送信信号を生成する発振回路9と、誘電体からなる基板1の一方の表面または内部の略全面に形成された送信信号のグランドとして作用する接地電極2と、他方の表面に形成された、送信信号を電波ビームとして前方に放射する少なくとも1つの矩形状の送信電極3と、送信電極3から放射され被検知体に衝突し反射して戻ってきた電波ビームを受信信号として受信する伝送線路17bにて相互に接続された矩形状の複数の受信電極4a、4bと、何れか一方の端子が接地電極2のみに、他方の端子は伝送線路17bに各々接続され、複数の受信電極4a、4bにて受信した受信信号を検波する検波素子5と、検波素子5にて検波された受信信号を外部に出力する出力線路6とを備え、出力線路6は直接、受信電極4bに接続される。
(もっと読む)
物体検出システム、該物体検出システムに用いられる物体検出方法及び物体検出制御プログラム
【課題】レーダから放射される電波に対する反射率が著しく小さいステルス性を有する飛行物体などを検出する物体検出システムを提供する。
【解決手段】レーダ(たとえば、合成開口レーダ11)により、高空から地表方向に所定時間毎に電波が放射されると共に、地表の電波反射率が走査されて観測され、同一場所の電波反射率が複数回(たとえば、2回)ずつ逐次観測される。そして、物体検出手段(たとえば、電子計算機12)で、この観測された同一場所の電波反射率が比較され、各電波反射率に変化がある場合、物体(たとえば、飛行物体P1,P2)が空中に存在することが検出される。
(もっと読む)
レーダ装置制御方法、レーダ装置、移動体および送受信装置
【課題】他の移動体の相対向きを算出することができるレーダ装置制御方法、レーダ装置、移動体および送受信装置を提供すること。
【解決手段】移動体の所定の位置に設置された複数の送受信部が、移動体番号と設置位置番号とを含む信号を送信し、他の移動体に設置された複数の送受信部から送信される信号を受信した場合に、信号を受信した受信部、信号を送信した他の移動体、信号を送信した送信部が設置されている位置を特定することにより、他の移動体の相対向きを算出する。
(もっと読む)
車両移動状況検出装置および車両移動状況検出方法
【課題】 自車両の進行に関する方位と対地車速を正確に検出し物体への接近を確実に回避する。
【解決手段】複数の側方監視用レーダ装置21,22を用いて、静止物体を識別する。静止物体RM1,RM2の方位および相対速度の検出値に基づいて空間的に密集して存在する物体を静止物体RM1,RM2と判定し、該判定された静止物体を成す物体(反射点)のうち自車両から最至近に位置する物体T11,T21に関する方位および相対速度の情報に基づいて物体との接近の蓋然性を判断し、車両制御装置50にこの蓋然性低減のための信号を供給する。
(もっと読む)
個別認識装置及び個別認識システム
【課題】
識別情報が記録されたICタグを貼付されている複数の対象物に対し、各物体を自動的に識別し個々の移動予測を行なう個別認識装置と個別認識システムを提供する。
【解決手段】
識別情報が記録されたICタグを貼付されている複数の対象物に対し、各物体を自動的に識別し個々の移動予測を行なう個別認識装置であって、センシング中央にセットしてセンサ周囲の環境形状を測定するレーザーレンジファインダと、各物体に貼付されたICタグに記録された情報を蓄積したデータベースと、システム中心から各物体の距離を読み取れるICタグリーダと、レーザーレンジファインダで得た環境形状変化と、ICタグリーダで得たICタグ情報と、システム中心から前記各物体までの距離変化から、データベースに蓄積した情報を元に、各ICタグが添付された対象物情報、位置、移動ベクトルを算出し、各対象物の移動予測を行ない各対象物を認識する判別器から構成した個別認識装置及び個別認識システムである。
(もっと読む)
物体検出装置
【課題】死角を減少させて、自車両の周辺のターゲットを、簡易な構成で検出することができる物体検出装置を提供する。
【解決手段】物体検出装置は、当該車両の外部に向けた第1の検出範囲内の物体を検出する第1レーダと、上記車両における上記第1レーダと異なる位置に搭載され、当該車両の外部に向けた第2の検出範囲内の物体を検出する第2レーダと、上記第1レーダの検出結果および上記第2レーダの検出結果に基づいて、検出された物体が上記車両に衝突する危険性を判断する判断手段とを備える。また、上記第1レーダおよび上記第2レーダは、当該第1の検出範囲の中心軸と当該第2の検出範囲の中心軸とが上記車両の外部でねじれるまたは交わる位置関係で上記車両に搭載される。
(もっと読む)
レーダ情報伝送システム及びそのためのレーダ装置
【課題】複数のレーダ装置の間でのレーダ情報の伝送システムにおいて、情報伝送のための通信装置を設けることなく、レーダ情報を伝送し、レーダ装置間で情報を共有すること。
【解決手段】第1パルスレーダ装置Aからパルス電波に物標情報に基づく通信データを重畳して形成された通信データ重畳電波を送信し、第2パルスレーダ装置Bで通信データ重畳電波に含まれる物標情報を取得することにより、情報伝送のための通信装置を設けることなく、レーダ装置間で情報を共有する。
(もっと読む)
車両周辺監視装置
【課題】 車両から遠くにある物体を感度良く検出しつつ、検出不要な物体を区別することができる「車両周辺監視装置」を提供する。
【解決手段】 周辺車両検出装置10は、送信波発生部20、送信信号に基づき超音波を送信しかつその反射波を受信する超音波センサ30、超音波センサ30で受信した信号を検波する受信検波部40、検波結果に基づき反射波の受信信号を検出する反射波検出部50、反射波の受信信号を増幅する反射波増幅部60、反射波増幅部60で増幅された信号を用いて警告等を発する警告部70、反射波検出部50の検出レベルを設定する検出レベル設定部80とを含む。
検出レベル設定部80は、車両から物体までの距離が遠ざかるにつれて検出レベルが小さくなるような負の傾きを持つ関数として設定する。
(もっと読む)
電波センサ
【課題】少電力にてセンサ前方に存在する被検知体の有無や移動状態を精度良く検出するコンパクトな電波センサを提供する。
【解決手段】送信信号を生成する発振回路9と、誘電体からなる基板1aと、基板1aの一方の表面または内部の略全面に形成された送信信号のグランドとして作用する接地電極2aと、基板1aの他方の表面に形成された、送信信号を電波ビームとして前方に放射する矩形状の送信電極3と、送信電極3から放射され被検知体に衝突し反射して戻ってきた電波ビームを受信信号として受信する矩形状の受信電極4と、受信電極4に接続され、受信電極4にて受信した受信信号を検波する検波素子5と、検波素子5にて検波された受信信号を外部に出力する出力線路6とを備え、出力線路6を受信電極4の励振方向と平行な端辺に接続する。
(もっと読む)
存在・動き検出用受動レーダー
受動検出器(10)は、環境中の受動的放射(12)を収集するよう構成された受信機(11)を含む。ここで、前記受動的放射の一部についての詳細な情報が受動的エネルギーのベースラインとして推定される。受動的エネルギーは、当該検出器と無関係の受動的源によって生成される。モニタ(24)が、ベースラインにおけるゆらぎを測定するよう構成される。ゆらぎが環境における存在または動きを表すかどうかを判定するために、モニタに判断モジュールが結合されている。検出方法も開示される。 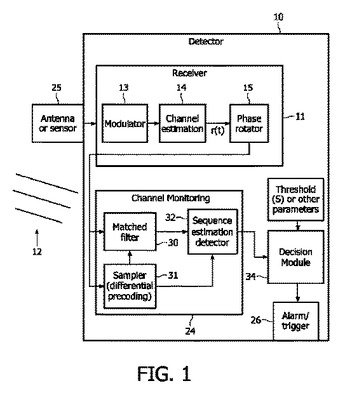 (もっと読む)
(もっと読む)
電波センサ
【課題】被検知体の位置や移動状態を精度良く識別するコンパクトな電波センサを提供する。
【解決手段】電波ビームとして前方に放射する少なくとも第1接地電極13と薄膜状の送信電極12とを有する平板状の送信アンテナの放射面に対し、被検知体に衝突し反射して戻ってきた電波ビームを受信する少なくとも第2接地電極23と薄膜状の受信電極22a、22b(一対のダイポールアンテナ)とを有する平板状の受信アンテナの受信面が略直交し、且つ送信電極12に対して受信電極22a、22bよりも第2接地電極23が近接するように、受信アンテナを配置する。
(もっと読む)
物体検出装置、物体検出方法および物体検出システム
【課題】歩行者のような弱反射物体であっても最初のレーダ探索で検出すること。
【解決手段】物体種別判定部が、車両に搭載されたカメラによって撮像された画像に基づいて物体の種別を判定し、閾値選択部が、判定された種別に対応付けられた所定の閾値を選択し、画像に対応する範囲について照射した照射波に係る反射波の強度が選択された閾値以上であることを条件として物体を検知するように、物体検出装置あるいは物体検出システムを構成する。
(もっと読む)
高周波スイッチ
【課題】スイッチの操作面前方にて使用者の手や指が接近または横断する移動方向を精度良く識別し、負荷を駆動するスイッチを提供する。
【解決手段】電波ビームを複数の方向へ放射し、各放射方向毎に被検知体の動きを周波数に換算し、検知信号として外部に出力するセンシング11手段と、前記検知信号に基づいて、前記被検知体が前記センシング手段11の前方を横断する移動方向を算出し、識別信号として外部に出力する動作方向識別手段31と、前記識別信号に基づいて、直接または間接的に負荷を駆動するための駆動信号を出力する負荷駆動手段41と、負荷の駆動を操作する操作面52とを有する高周波スイッチであって、複数の方向へ放射される電波ビームは全て、前記操作面52に対し鉛直方向から所定の方向へ傾けて放射される。
(もっと読む)
操作スイッチ
【課題】 検出機構の機械的劣化が無く、かつ操作部の部材や機構を自由に設計できる操作スイッチを提供する。
【解決手段】 操作スイッチにおいて、被検知体の動きを検知するセンシング手段1と、このセンシング手段1を収納する筐体と、負荷6の駆動を操作する操作部3とを備えた操作スイッチであって、前記センシング手段1からの検知信号に基づいて、前記被検知体の動きが前記操作部3を操作する動きであるか否かを判断する操作判断回路4と、この操作判断回路4からの出力信号に基づいて、前記負荷6を駆動する負荷駆動手段5とを備えた。
(もっと読む)
スイッチ装置
【課題】スイッチの操作面前方にて使用者の手や指が接近または横断する移動方向を精度良く識別し、負荷を駆動するスイッチを提供する。
【解決手段】複数の位置検知エリアを備えたスイッチ装置であって、複数の位置検知エリアが重複する領域であって、複数の位置検知エリア間における被検知体の連続した動きを検知するための連続動作検知エリアを備え、複数の位置検知エリアと連続動作検知エリアにおける検知情報に基づいて、被検知体の移動方向を算出し、直接または間接的に負荷を駆動するための駆動信号を出力する。
(もっと読む)
目標追尾装置及び目標観測システム及び目標追尾方法及びプログラム
【課題】複数の目標が重なって一つの目標として観測されたのち重なった目標が離れて再び複数の目標として観測された場合でも、正しく目標を同定できる相関処理を実現する。
【解決手段】重複判定装置115は、複数の目標が重なって一つの目標として観測されたか否かを判定する。目標間距離算出装置121は、複数の目標が重なる直前に観測された位置の間の距離(重複前距離)を算出する。目標間距離ゲート設定装置131は、重複前距離に基づいて分離判定範囲を設定する。分離判定装置132は、分離判定範囲内に新たな目標が観測された場合に、重なった目標が離れて再び複数の目標として観測されたと判定する。分離妄評移動距離算出装置133は、分離目標移動距離を算出する。分離目標判定装置135は、分離目標移動距離に基づいて重なった目標が離れて観測された複数の目標を同定する。追尾装置150は、分離目標判定装置135が同定した目標を追尾する。
(もっと読む)
41 - 60 / 127
[ Back to top ]