
Fターム[5J070AC15]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 移動方向(センス) (168)
Fターム[5J070AC15]の下位に属するFターム
距離の変化によるもの (23)
信号位相の進・遅によるもの (12)
2ミキサを物理的に離したもの (6)
Fターム[5J070AC15]に分類される特許
101 - 120 / 127
移動情報検出装置
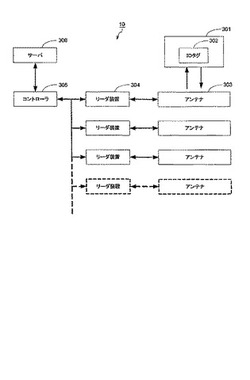
【課題】無線ICタグを取り付けた移動体を1つのアンテナおよびリーダ装置で検知して、移動体の特定と同時に、進行方向および移動速度をも検出できる移動情報検出システムを提供する。
【解決手段】移動体の移動方向に所定距離を隔てて2個の無線ICタグを取り付ける。移動体の移動経路には、移動体の2個の無線ICタグを通過した順番に個別に検知できるアンテナ303が配置される。移動体がアンテナ303を通過する際の2個の無線ICタグの読み取り順序から移動体の移動方向が判別される。また、2個の無線ICタグの読み取り時間差で2個の無線ICタグの配置間隔を除することによって、アンテナ303を通過する際の移動体の移動速度が求められる。
(もっと読む)
車両検出装置及び車両検出方法

【課題】道路上における車両の存在状態の検出について、周囲の環境や時間帯の影響を受けにくくすることができる車両検出装置を提供する。
【解決手段】記憶手段5は、送信アンテナと受信アンテナ2との間の所定区間における車両の存在状態についての車両存在情報、及び、この状態における伝搬路の対応伝達行列を、複数パターンについて相互関連付けて対応情報として記憶している。受信アンテナ2で受信した受信信号に基づいて伝搬路の伝達行列を算出する。記憶手段5に記憶させてある前記対応伝達行列のうち、この算出した伝達行列に略一致する対応伝達行列を選択する。記憶手段5の対応情報に基づいて、選択した対応伝達行列に対応している車両存在情報を抽出する。これにより車両存在情報に対応している車両の存在状態を知ることができる。
(もっと読む)
レーダ装置
【課題】空間均一性がない場所でも、複数台のレーダ装置を設置することなく、風速ベクトルの計測精度を高めることができるようにする。
【解決手段】送受信部1により生成されたレーザ光のビーム方向を切り換えながら、そのレーザ光を大気中に放射するビーム放射部2と、そのビーム放射部2によりレーザ光が放射される方向に設置され、そのレーザ光のビーム方向を観測点4が存在している方向に切り換える反射鏡3a,3b,3cとを設け、その観測点4により反射されたビーム方向が異なるレーザ光A’,B’,C’のドップラー速度を解析し、複数のドップラー速度を合成して風速ベクトルを算出する。
(もっと読む)
ケーブル位置情報管理システム、装置、方法およびプログラム
【課題】マンホール内に敷設されたケーブル類の移動量、またはマンホール内を流れる水の水位、周囲の温度、ガス濃度をマンホールの蓋を開けずに取得することができること。
【解決手段】特有の情報を保持する複数の無線タグをその表面に付着したケーブルと、電波を遮蔽する物質からなり、少なくとも1つの穿った穴を有する電波遮断板と、無線アンテナを有し、前記無線タグが有する情報を読み取る無線アンテナ付リーダと、無線タグの情報を受信する手段と、その受信した内容を記憶する手段と、取得した無線タグの情報を通信ネットワークを介して通知する手段と、を備えた携帯端末と、通信ネットワークを介して携帯端末より通知される無線タグの情報内容を取得する手段と、前記受信した無線タグの情報を記憶する手段と、前記無線タグの情報によりケーブルの位置情報を取得しケーブルの位置情報を保存する手段と、を備えたサーバとを備える。
(もっと読む)
移動方向検知レーダシステム
【課題】本発明の目的は、物体の移動方向を確実に検知できるレーダシステムを提供することである。
【解決手段】レーダ送受信機と検出反射体とを備えた移動方向検知レーダシステムにおいて、前記レーダ送受信機は、前記レーダ送受信機と該レーダ送受信機のレーダビームの最大利得方向からオフセットした主ローブ範囲内の方向に設置された検出反射体との間を横切って移動する物体から反射したレーダ電波を受信したレベルが最大値を示す時刻を検知する手段と、前記検出反射体から反射したレーダ電波を受信したレベルが前記物体により遮断され最小値を示す時刻を検知する手段と、前記最大値を示す時刻と最小値を示す時刻の前後関係により前記物体の移動方向を判断する手段とを備えたことを特徴とする移動方向検知レーダシステムを用いる。
(もっと読む)
合成開口レーダ画像による目標物識別方法及び装置
【課題】2次元SAR画像における倒れ込み現象による影響を除去し目標対象の識別精度を向上させる。また、目標の領域そのものを精度良く決定し識別精度を向上させる。
【解決手段】本発明の目標物識別装置は、SAR部161(合成開口レーダ部)と、レーダ反射信号をSAR部161から入力し2次元SAR画像を生成するSAR画像取得部162と、SAR画像の中から目標物を切り出す対象切り出し部163と、切り出された目標物の特徴量を計算する特徴計算部164と、モデルを記憶するモデル記憶部167と、目標物の特徴がモデルの特徴と合致するか否か識別する対象識別部165とを備える。対象識別部165は、飛翔体の飛翔方向及び目標物の姿勢に依存して目標物の2次元レーダ画像上に現れる変形(倒れ込み)を考慮し、反射強度分布をレーダ照射方向に射影して、目標物の特徴が、モデルの特徴と合致するか否か識別する。
(もっと読む)
マイクロ波ドップラーセンサ
【課題】 加工性の良好な材料を用いて、強度、コストの問題に対応しつつ、ドップラーセンサの回路に影響を与えないマイクロ波ドップラーセンサを提供すること
【解決手段】 所定周波数のマイクロ波を生成する局部発振器15と、マイクロ波を放射並びに受信するアンテナ12と、そのアンテナから受信したマイクロ波と局部発振器から出力されるマイクロ波を混合し検波する検波器16と、アンテナの前面に配置されるレドーム13と、を備える。レドームは、全表面の面積の2分の1の範囲である第1レドーム部13aと他方の2分の1の範囲である第2レドーム部13bとに、所定周波数により求められる波長の4分の1の深さの段差を設けた。
(もっと読む)
位置特定装置、画像再生装置、位置特定方法および位置特定プログラム
【課題】 SAR(Synthetic Aperture Radar、合成開口レーダ)画像における移動する目標物の位置を算出することを目的とする。
【解決手段】 目標物のレンジ方向への移動速度であるレンジ方向速度を測定して記憶装置に記憶する速度測定部210と、速度測定部210が測定したレンジ方向速度に基づき、アジマス方向へのシフト量を算出して記憶装置に記憶するシフト量算出部220と、SARにより観測されたSAR再生画像を入力するSAR再生画像入力部222と、シフト量算出部220が算出したシフト量とSAR再生画像入力部222が入力したSAR再生画像の目標物の座標とに基づき、目標物の位置を特定して記憶装置に記憶する位置特定部224とを備える。
(もっと読む)
移動体管理システム及び移動体装置
【課題】任意の位置における移動体の向きを確実に把握する。
【解決手段】ショッピングカート2は、切換え部31により第1のアンテナ32を選択している状態でこの第1のアンテナから電磁波を放射し、第1のアンテナの通信エリア内の商品陳列棚に配置された位置タグと無線通信を行って位置コードを取得する。そして、取得した位置コードと第1のアンテナの配置位置を無線通信部23から通信用アンテナ29を介してサーバ1に送信する。サーバはデータベース15から位置コードに対応した位置座標を読出し、この位置座標と第1のアンテナの配置位置の関係から、ショッピングカートの現在位置及び進行方向を判断する。そして、判断した現在位置及び進行方向をショッピングカートに送信する。ショッピングカートは現在位置及び進行方向をサーバから受信し、表示部26に表示して知らせる。
(もっと読む)
障害物検出装置
【課題】 車両の後方、後側方の障害物検出に適した構成を有する障害物検出装置を提供する。
【解決手段】 後方、後側方の障害物を検出する電波レーダの検出結果を読み込み(ステップS1)、車速センサやシフトセンサの出力を基にして進行方向を検出し、その結果を読み込む(ステップS3)。後退中の場合には、反射波強度MPが第1の判定しきい値MPth1を超える場合には、そのトラッキング時間がしきい値tc_th1を超える場合に障害物と判定し(ステップS7〜S13)、第2の判定しきい値MPth2を超え、MPth1以下である場合には、そのトラッキング時間がしきい値tc_th2を超える場合(ここで、tc_th2>tc_th1である。)に障害物と判定する(ステップS15〜S21)。後退中以外は接近中の物体についてのみ第1の判定しきい値MPth1により障害物判定を行う(ステップS27〜S39)。
(もっと読む)
目標物の位置測定方法および位置測定装置
【目的】 広角レーダ装置において測定誤差の度合を示す値を出力できる「目標物の位置測定方法および位置測定装置」を提供することである。
【構成】 広角レーダ装置において、目標物の現在位置、速度、移動方向に基づいて所定時間後の目標物の位置を予測し、ついで、所定時間後の目標物の位置を測定し、該予測点と測定点を用いて目標物の現在位置を決定し、該現在位置と前記測定点位置との差を累積して測定誤差の度合を示す値を出力する。現在位置を決定するに際して、測定点までの距離に応じた第1の重みと測定誤差の度合に応じた第2の重みを考慮し、予測点と測定点を用いて目標物の現在位置を決定する。
(もっと読む)
防犯センサ
【課題】検知対象物体の移動方向や位置に関わらず常に的確な検知を行うことができる信頼性の高い防犯センサを提供する。
【解決手段】検知エリアに向けてマイクロ波を送信し、この検知エリア内に存在する物体からの反射波を受信して、その物体までの距離に対応する距離情報を出力するとともに、その物体の方向情報を出力するマイクロウエーブセンサ320と、これによって得られる2次元物体位置情報の時間的な変化に基づいて前記物体の移動パターンを認識し、その移動パターンに基づいて前記検知エリア内に検知対象物体が存在しているか否かを判別する検知対象物体存在判別手段332と、この検知対象物体存在判別手段によって検知対象物体が存在していると判別された場合に警告信号を出力するように制御する警告信号出力制御手段333とを備える。
(もっと読む)
衝突危険予測システム、および、プログラム
【課題】 航空機同士の衝突危険状態を適切に検出することのできる衝突危険予測システム等を提供する。
【解決手段】 レーダ装置1は、レーダスキャン等により、管制すべき各航空機の飛行位置、速度及び、方向を含む飛行情報を、それぞれ取得する。処理装置2は、レーダ装置1により取得された飛行情報に基づいて、各航空機の速度ベクトルを求め、速度ベクトル同士から定まる相対ベクトルを算定する。処理装置1は、予め定められた円柱形状からなる保護領域を、各航空機の飛行位置に対応する仮想空間にそれぞれ設定すると、この各保護領域に、算定した相対ベクトルに応じて半径等の長さが異なる扇形柱形状の領域を、各航空機の進行方向に対応させてそれぞれ付加し、各保護領域を拡張させる。そして、処理装置2は、拡張させた保護領域同士の重なりに基づいて、衝突危険状態を検出する。
(もっと読む)
位置検出用タグ、位置検出装置、位置検出方法、位置検出システム
【課題】無線ICタグを用いて、位置と方位を安価に精度良く測定することが可能な位置検出システムを提供すること。
【解決手段】位置検出用タグ11を、それぞれの偏波方向が異なる複数の無線ICタグ21〜24により構成した。これら無線ICタグ21〜24のうち、位置検出装置12が送信する信号の直線偏波に対応する無線ICタグが応答してタグ番号を送信する。この応答した無線ICタグのタグ番号により、位置検出装置12の質問器32は、変換テーブル33に記憶されたデータを検索し、応答した無線ICタグに対応する位置情報(位置及び方向)を読み出し、利用者の位置及び方向を特定する。位置検出装置12から送信する直線偏波の信号は、円偏波の信号に比べて到達距離が長いため、位置検出装置12のアンテナ31と位置検出用タグ11とを離すことができる。
(もっと読む)
衝突予知装置および衝突予知方法
【課題】様々な交通環境の変化に対応して、車両前方の物体を正確に検出することができ、衝突を精度良く予知することができる衝突予知装置を提供することを課題とする。
【解決手段】衝突予知装置1であって、異なる手段で車両前方の物体を検出する複数のセンサ20,30と、入力された条件に適したセンサ20,30を選択し、選択されたセンサ20,30から得られた情報に基づいて、自動車Aと前方の自動車との衝突を予知する制御部10とを備えていることを特徴としている。
(もっと読む)
目標検出装置
【課題】 船舶などの目標が生み出す引き波の影響を排除して真の目標を正確に検出し、真の目標がカメラの撮影範囲から逸脱しないようにカメラを制御することができる目標検出装置を得ることを目的とする。
【解決手段】 クラスタリング処理部6により検出された目標のビデオ領域における進行方向の広がり部分を検出し、その目標のビデオ領域から進行方向の広がり部分を除去する広がり除去部10を設け、その広がり除去部10により広がり部分が除去された目標のビデオ領域の重心位置を計算し、その重心位置に応じてカメラ16を制御する。
(もっと読む)
レーダ装置
【課題】 広帯域の電波の送受信を必要とせず、目標類別の精度が高い目標類別装置を得る。
【解決手段】 目標に送信信号を照射し、反射波を受信して受信信号を出力する送受信機20と、受信信号から目標の軌跡を推定する追尾処理部30と、受信信号を処理してクロスレンジプロフィールを生成するクロスレンジプロフィール生成部40と、クロスレンジプロフィールから特徴量を算出し、目標の類別を行う類別処理部50を備え、クロスレンジプロフィール生成部40は、オートフォーカス処理部42において受信信号のドップラー周波数の変化量を抽出し、アスペクト角変化量推定部44は、そのドップラー周波数の変化量を用いて目標のアスペクト角の変化量を推定する。そしてクロスレンジスケーリング部45において、アスペクト角変化量推定部44で推定したアスペクト角の変化量を用いてドップラープロフィールをクロスレンジプロフィールに変換する。
(もっと読む)
行動検出システム
【課題】 低コストでかつ日頃の徘徊の程度のような行動パターンを容易に検出可能な行動検出システムを提供する。
【解決手段】 行動検出システムは、人が保持し、トリガー信号に応答してID番号を出力するIDタグと、それぞれが異なる機能を提供する複数の位置にそれぞれ設けられ、トリガー信号を発信するトリガー信号発信部と、IDタグの出力したID番号を受信するトリガー信号受信部と、複数のトリガー信号受信部に接続され、トリガー信号受信部の受信したID番号をその受信時刻とともに保持するデータ保持手段と、データ保持手段の保持するデータの中から、特定の人のデータを抽出する抽出手段と、抽出手段の抽出したデータに基づいて、所望の表示を行なう表示手段とを含む。
(もっと読む)
無線タグ通信装置及び無線タグ管理システム
【課題】 消費電力を抑えて効率的な無線タグ管理を行う無線タグ通信装置及び無線タグ管理システムを提供する。
【解決手段】 無線タグ14との間の通信指向性を順次切り換えるように制御する指向性制御部34と、その指向性制御部34により切り換えられるそれぞれの通信指向性における前記無線タグ14からの返信信号を比較し、その比較結果に基づいてその無線タグ14の移動を判定する無線タグ移動判定部64とを、含むことから、前記無線タグ14との間で必要十分な通信を行うことでその無線タグ14の移動を判定することができる。すなわち、消費電力を抑えて効率的な無線タグ管理を行う無線タグ通信装置12を提供することができる。
(もっと読む)
少なくとも1つの側方および後方の周辺状況捕捉装置を有する自動車用の危険検知システム
本発明は、少なくとも1つの、側方および後方の周辺状況捕捉装置を有する、自動車用の危険検知システムに関する。本発明は、少なくとも1つの、側方および後方の周辺状況捕捉装置、周辺状況解釈装置および運転者反応支援装置を有する、自動車用の危険検知システムであって、周辺状況捕捉装置が、本危険検知システムを搭載した自動車に対して相対移動する移動対象物を捉えるシステムに関する。この危険検知システムは走行方向に逆向きに配置されている2つのセンサを有している。このシステムはデータの算出用として、センサ毎に少なくとも1つの評価および解釈ユニットを有している。  (もっと読む)
(もっと読む)
101 - 120 / 127
[ Back to top ]