
Fターム[5J070AC15]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 移動方向(センス) (168)
Fターム[5J070AC15]の下位に属するFターム
距離の変化によるもの (23)
信号位相の進・遅によるもの (12)
2ミキサを物理的に離したもの (6)
Fターム[5J070AC15]に分類される特許
1 - 20 / 127
目標物管理装置および目標物管理方法
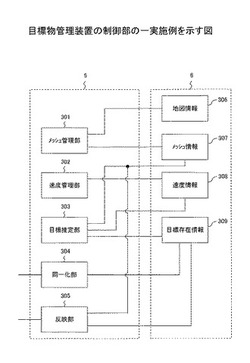
【課題】本発明は、目標物が存在する可能性のある区域を精度よく推定する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲を一定の区域からなるメッシュに区切り、管理するメッシュ管理部と、探知した目標物の情報を有する探知情報を用いて、目標物の存在するメッシュを決定し、時間経過に応じて目標物の存在する目標存在メッシュを推定する目標推定部と、目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、目標存在メッシュを更新する同一化判定部と、目標物がない地域を示す否定情報を受信すると、地域に対応する目標物がないメッシュを前記目標存在メッシュに反映し、反映した目標存在メッシュを更新する反映部と、を備えることを特徴とする目標管理装置である。
(もっと読む)
自動水栓装置

【課題】連通管自体を電波センサの電波の伝播通路として構成し、連通管に対する通水ホースの振動を抑制し、連通管内での電波の伝播における電波の減衰を抑制する自動水栓装置を提供する。
【解決手段】スパウト10と、通水ホース20と、開閉弁30と、電波センサ40と、スパウト10の基端部と電波センサ40とを繋ぐ導波管43と、電波センサ40を用いて開閉弁30を制御する制御部1Bとを備えた自動水栓装置1において、スパウト10の内周面と通水ホース20の外周面との間の空間が、電波の伝播通路として用いられ、支持部材60は、弾性を有する絶縁体からなり、支持部材60がスパウト10の内周面に当接し且つ挿通部に通水ホース20が挿通された状態で、スパウト10に対して通水ホース20を支持するように構成され、挿通部は、通水ホース20をスパウト10の内周面の中心位置から偏心した位置に支持する。
(もっと読む)
トイレ装置
【課題】トイレ室に設けられる各種のトイレ装置であって、誤検知を極力抑制して無駄な電力の消費を抑制しつつ、使用者が使用する際には所定の予備的動作を確実に実行可能なトイレ装置を提供することを目的とする。
【解決手段】トイレ室内に設けられ、電波の送受信を行うドップラーセンサと、前記ドップラーセンサの出力信号に基づいて所定の制御を実行する制御部と、を備えたトイレ装置であって、前記制御部は、前記ドップラーセンサから出力されるドップラー信号の直流成分を検出する第1の検出手段と、前記ドップラーセンサ信号に含まれる周波数成分を検出する第2の検出手段と、を有し、トイレ室のドアの開動作に伴う前記ドップラーセンサ信号の直流成分と周波数成分の推移の少なくともいずれかに基づいてドアの設置環境を判定し、判定したドア設置環境に応じて検出閾値を設定して、前記ドアの開動作を検出するドア開検出モードを実行することを特徴とするトイレ装置を提供する。
(もっと読む)
自動水栓装置
【課題】連通管自体を電波センサの電波の伝播通路として構成し、連通管の基端部からの電波漏れを確実に防止することができる自動水栓装置を提供する。
【解決手段】スパウト10と、通水ホース20と、開閉弁30と、電波センサ40と、スパウト10の基端部と電波センサ40とを繋ぐ導波管43と、電波センサ40を用いて開閉弁30を制御する制御部1Bとを備えた自動水栓装置1において、スパウト10の内周面と通水ホース20の外周面との間の空間が、電波の伝播通路として用いられ、スパウト10の基端部の開口を塞ぐ固定部材50を更に備え、固定部材50は、導波管43が固定されると共に、通水ホース20が移動可能に挿通され、導波管43の外周面とスパウト10の内周面との間の隙間を塞ぐ第1固定部材51と、第1固定手段51と通水ホース20の外周面との間の隙間を塞ぐ第2固定部材55とを備えている。
(もっと読む)
受信装置
【課題】本発明は、UWB通信方式を用い、消費電力をより低減し得る受信装置を提供する。
【解決手段】本発明の受信装置Rxは、一定の時間間隔で配列された短パルス波であるウルトラワイドバンド方式の送信信号を送信する送信装置Txから送信された短パルス波が物体に当たって反射した反射波を受信する受信装置Rxであって、受信信号を周波数変換して中間信号を出力する伸長器31と、中間信号から、目的とするパルスの識別および到来時刻識別を行ってパルス検出信号を出力するパルス検出器33と、パルス検出信号に基づいて物体の運動の有無を検出する物体運動検出部とを備え、伸長器31は、受信信号に含まれる短パルス波の発生タイミングに同期して間欠動作する発振器31aを含み、物体運動検出部は、反射波を複数回受信することによって得られた各受信強度の分散値に基づいて前記物体の運動の有無を検出する。
(もっと読む)
侵入検知装置、侵入検知システム、侵入検知方法および侵入検知プログラム
【課題】電波を用いて所定エリアにおける人間の侵入を検知する構成において、検知可能エリアが狭くなることを防ぐ。
【解決手段】侵入検知装置102は、他の装置から無線信号が送信される所定エリアにおいて、人間の動作を検知する。侵入検知装置102は、アンテナを含み、アンテナにおいて無線信号を受信するための受信部52と、受信部52によって受信された無線信号に基づいて所定エリアにおける空間特徴量を算出するための空間特徴量算出部11と、空間特徴量算出部11によって算出された空間特徴量に基づいて所定エリアにおける人間の動作を検知するための検知部82とを備える。受信部52は、アンテナの指向性パターンを選択可能であり、複数の指向性パターンの中から、受信する無線信号のレベルが最も小さくなる指向性パターンを選択する。
(もっと読む)
津波監視システム
【課題】 観測装置設置の経済性とメンテナンス性において卓越し観測確認が容易な津波監視システム。
【解決手段】 陸上に設置したレーダーから発するレーダー波により監視海面を一定周期でスキャンニングし、レーダー波の反射により監視海面の測定を行い、データを処理して海面の隆起を測定し、この観測測定において海面の上昇が一定値を超えたときにおいて警報を発することを特徴とする津波監視システム、地震発生時に、陸上に複数箇所に設置したP波地震計の観測データをサーバーに集め、発生した地震のP波の分析により、海側の震源とその地震の規模を算出し、津波の発生の可能性とその大きさを予測し、津波の可能性とその大きさが一定値を超えたときにおいて、前記記載の津波監視システムのデータとを総合的に判定して最終避難警報を発すること特徴とする津波監視システム。
(もっと読む)
車両用物体検知装置
【課題】自車両の外部に存在する物体の静止および移動の状態を精度良く検知する。
【解決手段】車両用物体検知装置10は、レーダ装置12から発信された電磁波の物体上における反射点の位置を算出する反射点算出部21と、自車両から物体までの距離を算出する距離算出部22と、反射点の位置に基づき物体の水平方向の両方の端点を検出する端点検出部23と、検知対象物の何れか一方の端点が自車両から見て比較対象物に重なっているか否かを判定する重なり判定部24と、重なり判定部24により重なっていると判定され、かつ、時間経過と共に検知対象物までの距離が比較対象物までの距離よりも近くなった場合に、検知対象物の前記比較対象物に重なっていない他方の端点の横移動量に基づいて検知対象物の横移動速度を算出する端点移動速度算出部25とにより、検知対象物の横移動速度の検出精度を向上させる。
(もっと読む)
人体検知装置
【課題】使用者の行動態様を正確に検知することが可能な人体検知装置を提供すること。
【解決手段】この人体検知装置1は、行動判定部6は、ドップラー信号生成部4及びドップラー信号算出部5が生成する差分ドップラー信号の振幅強度及び周波数に基づいて、検知領域内の所定位置に対する使用者の移動と、検知領域内の所定位置における使用者の動きとを判定することで、使用者の行動態様を検知する。
(もっと読む)
人体検知装置
【課題】省電力化を図りつつも簡便な装置構成で、検知領域における使用者の存在有無を正確に検知することが可能な人体検知装置を提供すること。
【解決手段】この人体検知装置1は、ドップラー信号生成部4が、第一周期毎に、第一周期に比較して十分に短い第二周期間隔で、少なくとも2以上である複数のドップラー信号を生成する第一生成モードを実行し、行動判定部6は、第一周期毎に複数のドップラー信号それぞれの振幅強度と第一閾値とを比較し、使用者が検知領域に存在しているか否かを判定する第一判定モードを実行する。
(もっと読む)
自動水栓装置
【課題】電波の導波経路からの電波の漏れを無くして、誤検知を発生しない自動水栓装置を提供する。
【解決手段】吐水口、及び取付面に設置するための取付部、を有するスパウト本体と、スパウト本体内に隣接して配置された通水路及び導波路と、導波路を通して電波を送受信する電波センサであって、取付部に対して吐水口とは反対側にスパウト本体から露出した状態で導波路の端部に取り付けられており、導波路の端部に取り付けられた状態で取付面のスパウト取付孔を通過可能に構成された電波センサと、が一体的に組合わされたスパウトユニットと、電波センサの検知信号に基づいて、通水路に接続された電磁弁を駆動して吐水口からの洗浄水の吐水及び止水を実行する制御部と、を有する自動水栓装置。
(もっと読む)
自動水栓装置
【課題】電波の導波経路からの電波の漏れを無くして、誤検知を発生しない自動水栓装置を提供する。
【解決手段】吐水口、及び取付面に設置するための取付部、を有するスパウト本体と、スパウト本体内に隣接して配置された通水路及び導波路と、導波路を通して電波を送受信する電波センサであって、取付部に対して吐水口とは反対側にスパウト本体から露出した状態で導波路の端部に取り付けられており、導波路の端部に取り付けられた状態で取付面のスパウト取付孔を通過可能に構成された電波センサと、が一体的に組合わされたスパウトユニットと、電波センサの検知信号に基づいて、通水路に接続された電磁弁を駆動して吐水口からの洗浄水の吐水及び止水を実行する制御部と、を有する自動水栓装置において、導波路と通水管との間に、導波路の振動を吸収する弾性部材が設けられている。
(もっと読む)
移動物体検出装置及びインターホン装置
【課題】 人物が近づいてきた場合及び離れる動作を的確に検出し、単純な出力信号により判定結果を出力する移動物体検出装置を提供する。
【解決手段】 ドップラーセンサ部14aのI相出力及びQ相出力から相互の位相差を演算し、求めた位相差を正負何れかの極性の電圧情報で出力する位相差演算処理部41と、この出力する電圧の絶対値が所定値以下である場合は電圧信号を出力しない不感帯処理部42と、この出力電圧情報が負の極性を有する場合は近づく物体があると判断して「H」信号を第1出力部43aから出力し、正の極性を有する場合は離れる物体があると判断して「H」信号を第2出力部43bから出力する一対のコンパレータ52a,52bと、不感体処理部42が出力する電圧の変化を正極の電圧変化とするためにオフセット電圧を加える加算回路51とを設けた。
(もっと読む)
侵入検知装置、侵入検知方法および侵入検知プログラム
【課題】人間の動作を高精度に検知することが可能な侵入検知装置、侵入検知方法および侵入検知プログラムを提供する。
【解決手段】侵入検知装置101は、所定エリアの状態を示す空間特徴量を算出するための空間特徴量算出部1と、空間特徴量算出部1によって算出された空間特徴量の時間的変化を算出するための変化レート算出部2と、変化レート算出部2によって算出された時間的変化に基づいて、所定エリアにおける人間の動作を検知するための検知部11とを備える。
(もっと読む)
制御装置、レーダ検知システム、レーダ検知方法
【課題】レーダから出力された検知結果によって異常を監視し、レーダの性能の低下を検知する。
【解決手段】取得部1aは、レーダ2から出力された信号に基づき、車道を走行した複数台の走行車両のそれぞれについて、検知開始位置および検知終了位置の座標を取得する。算出部1bは、検知開始位置の座標の平均値および検知終了位置の座標の平均値を算出し、算出結果を有する検知状況情報を検知状況情報記憶部1eに記憶させる。比較部1cは、検知状況情報が示す検知開始位置の座標の平均値および検知終了位置の座標の平均値とそれぞれの所定の基準値とを比較する。異常判定部1dは、比較部1cによる比較結果に基づいて、レーダ2の異常の発生の有無を判定し、異常が発生したと判定した場合には異常の発生を示す情報を出力する。
(もっと読む)
近接センサ
【課題】低い電力で動作し、かつ、被検物体を高精度で検出することを可能とする近接センサを提供する。
【解決手段】近接センサ1aは、発振器2と、発振器2の信号に基づいて交流信号Eaを放射する送信アンテナ3と、交流信号Ebを受信する受信アンテナ4と、受信アンテナ4に接続された共振器5を備える。共振器5は、例えば水晶振動子を用いて構成される。また、近接センサ1aは、発振器2の出力と共振器5の一方の端子とを接続するバッファ6と抵抗7を備える。共振器5は発振器2の発振周波数で予め励振される。さらに、近接センサ1aは、共振器5の出力を増幅する増幅器8と、発振器2の出力信号で、受信アンテナ4で受信した信号を位相検波する位相検波器9を備える。さらに、近接センサ1aは、位相検波器9の出力を平滑化するLPF10と、出力端子11を備える。
(もっと読む)
データ処理装置、動作認識システム、動作判別方法、及びプログラム
【課題】ドップラーセンサを用いて、加速度の大きさに依存せず対象物の動作を認識することが可能なデータ処理装置、動作認識システム、動作判別方法、及びプログラムを提供する。
【解決手段】データ処理装置100は、認識対象物20に対して放射した電磁波である放射波の周波数と、上記放射波が上記認識対象物により反射した反射波の周波数との差分の周波数を有するドップラーセンサ出力信号を取得するデータ取得部102と、上記ドップラーセンサ出力信号の特徴を示す特徴量を抽出する特徴量抽出部106と、上記特徴量に基づいて、上記認識対象物の動作を判別する動作判別部108と、を有する。
(もっと読む)
航行援助装置
【目的】
本発明は、船舶で航行中に危険物標や他船舶が自船予想針路上に出現または横断する可能性が発生した場合、ARPA(自動衝突予防援助装置)やAIS(自動船舶識別装置)などの装置を通じてレーダより得た危険物標の情報や他船の位置・針路ベクトルなどの情報を取り込み、予想針路との最接近距離と到達時間であるCPA・TCPAを計算し危険シンボルを表示する方法及び装置に関し、予想された針路が安全かどうかを知らせることを目的とする。
【構成】レーダ空中線部より得られた探知物標画像、及び自船情報と他船情報と予想針路情報を用いて演算部にて各予想針路位置におけるCPA・TCPAの演算を行ない、前記演算の結果からアラーム判定を行ない判定の結果に応じた危険シンボルを表示部へ画面表示させる。
(もっと読む)
イベント検出装置
【課題】電波の状態を監視することによって、そこに存在する人や物の状態の違いをも識別することができる高い精度を持つイベント検出装置を提供すること。
【解決手段】送信機が送信した電波を受信する複数のアンテナ21と、該複数のアンテナ21によって受信した信号を受信ベクトルとして該受信ベクトルから相関行列を演算する相関行列演算手段22と、該相関行列演算手段22によって演算された相関行列を固有値展開して信号部分空間を張る固有ベクトルを演算する固有ベクトル演算手段23と、該固有ベクトル演算手段23によって演算された固有ベクトルを入力して状態を判別するSVM(サポートベクターマシン)24と、SVM24の出力の連続性を考慮してイベントを検出するイベント検出手段25と有するイベント検出装置。
(もっと読む)
先行車検出装置
【課題】従来に比して正確に先行車の位置を検出可能な先行車検出装置を提供する。
【解決手段】自車両の前方を走行する先行車の位置を検出する先行車検出装置であって、少なくとも先行車の左右方向の位置情報を検出する先行車位置検出手段と、現時点において検出した位置情報を補正するフィルタ補正手段と、先行車の走行状態を推定する先行車走行状態推定手段と、フィルタ補正手段による補正の度合いを、先行車走行状態推定手段によって推定された先行車の走行状態に応じて変更するフィルタ制御手段とを備える先行車検出装置である。
(もっと読む)
1 - 20 / 127
[ Back to top ]