
Fターム[5J070AC20]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | その他 (52)
Fターム[5J070AC20]に分類される特許
41 - 52 / 52
構造物形状推定装置、障害物検出置および構造物形状推定方法
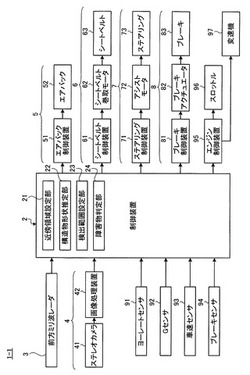
【課題】構造物の形状を精度良く推定することができる構造物形状推定装置、障害物検出装置および構造物形状推定方法を提供すること。
【解決手段】自車両の進行方向に存在する構造物の形状を推定する構造物形状推定装置において、自車両進行方向に存在する物体の位置を検出する前方ミリ波レーダ3と、自車両進行方向に存在する物体の位置を検出する前方ミリ波レーダ3と検出方法が異なる画像検出装置4と、前方ミリ波レーダ3により検出された物体の位置に基づいて、近似領域を設定する近傍領域設定部21と、この前方ミリ波レーダ3により検出された物体の位置およびこの設定された近似領域内の画像検出装置4により検出された物体の位置に基づいて構造物の形状を推定する構造物形状推定部22と、を備える。
(もっと読む)
組合せセンサシステム

【課題】屋外で使用する場合でも、センサ部への妨害行為を正確に判定できる組合せセンサシステムを提供する。
【解決手段】第1のセンサ(MWセンサ)3と第2のセンサ(PIRセンサ)4とを備えたセンサ部1と、前記第1のセンサ3からの第1検出信号d1に基づいて人体Pの移動距離M1を検出する移動距離検出回路21と、前記第1検出信号d1に基づいてセンサ部1から人体Pまでの距離D1を検出する距離検出回路20と、検出された前記移動距離M1が所定移動距離M0以上で、かつ、検出された前記距離D1が所定距離D0以下であるとき、妨害行為があったと判定して妨害検出信号a2を出力する妨害判定回路22とを有している。
(もっと読む)
レーダ装置
【課題】広角2次元監視をおこなうモノパルス方式のレーダを用いて、物体の種別を精度よく判定しうる安価な監視レーダ装置を提供する。
【解決手段】角度計測にモノパルス方式を採用したレーダ装置を用いて、監視領域内を移動する物体上の複数の箇所における反射波を受信し、各反射波について反射箇所を計測する。そして、計測データに基づき、移動物体の位置と監視レーダ装置の測角方向における大きさを算出する。
(もっと読む)
信頼度算出装置
【課題】所定領域に判定対象として予め定めた物体が存在するか否かを正確に判定する。
【解決手段】障害物認識装置では、障害物探索手段24は、受信信号取得手段32により取得された所定領域からの信号に基づいて、所定領域内に存在すると予想される歩行者からの反射信号を検出し、特徴量抽出手段36は、反射信号の強度を抽出し、存在確率算出手段40は、予め求めた物体からの反射信号の特徴量モデルと上記抽出された特徴量とに基づいて、物体の存在確率を算出し、不存在確率算出手段44は、ノイズ信号の特徴量モデルと上記抽出された特徴量とに基づいて物体の不存在確率を算出する。信頼度算出手段46は、算出された物体の存在確率と物体の不存在確率とに基づいて、検出された反射信号の信頼度を算出する。
(もっと読む)
特性値計測方法およびその装置
【課題】 電波の強度が変動した場合に正確に計測を実施することができなかった。
【解決手段】 電波の送信部から電波を送信し、電波の受信部にてその反射波を受信し、反射波の変化に基づいて計測対象の特性値を計測するにあたり、計測対象の特性値を計測する際に上記送信部から受信部に直接入射する直接波の変動に基づいて上記反射波の変動を補正して、上記計測対象の特性値を計測する。
(もっと読む)
レーダ装置
【課題】ドップラーを用いないことにより、パルス繰り返し周波数が低い場合に周波数分布が折返してブレード枚数が偶数か奇数かの判定が行えないことを解消した、回転翼機目標に関する種類識別のための特徴量を抽出することのできるレーダ装置を提供する。
【解決手段】受信信号にある第一閾値を設けてフラッシュを検出する第一閾値検出器1、第一閾値より低い第二閾値を設けてフラッシュを検出する第二閾値検出器2、第一閾値検出器と第二閾値検出器のフラッシュの検出周期を算出するフラッシュ周期判定器3、フラッシュ周期判定器で得られた各閾値に対応するフラッシュの周期を比較して第一閾値に関する周期が第二閾値に関する周期の二倍になっている場合にローターのブレードの枚数が奇数、両周期が等しい場合にはブレード枚数が偶数であると判断するブレード数偶奇判定器4、を備えた。
(もっと読む)
物体認識方法及び装置
【課題】 少ない演算量で、被検出対象のデータが混在しても安定して物体の形状を認識することができる物体認識方法、及びこの方法を用いた物体認識装置を提供する。
【解決手段】 移動体周辺に存在する物体の表面形状情報を検出し、この物体の輪郭形状を認識する物体認識方法であって、表面形状情報を構成する標本群から任意の標本を抽出する標本抽出工程#1と、抽出した標本に基づいて形状モデルを定める形状モデル設定工程と、形状モデルに対する標本群の一致度を演算する一致度演算工程と、一致度に基づいて輪郭形状を定める輪郭形状決定工程と、を実施するものであり、標本抽出工程#1は、抽出した標本により形状モデルとして所定の形状が形成可能か否かを判定する概略形状判定工程#14を備え、所定の形状を形成不可と判定した場合には、改めて前記標本を抽出する。
(もっと読む)
レーダ型探査装置
【課題】 同一範疇の探査領域に複数のターゲットが存在する場合において、これらのターゲットの全てを探査することを可能にしたレーダ型探査装置を提供すること。
【解決手段】 送信アンテナ10により送信され、ターゲットにより反射された反射波が受信アンテナ11によって受信される。受信アンテナ11による受信信号は、STC回路26および電圧制御抵抗素子29を含むレベル制御手段により利得調整がなされる。受信アンテナ11による受信信号の受信期間内において、前記レベル制御手段によるレベル制御を不能にする非受信ウインドウを設定することにより、送受信アンテナからの探査距離を限定した形でターゲットを探査するように動作する。
(もっと読む)
レーダ型探査装置
【課題】 広範囲のターゲットに対して利用することができる汎用性を持たせたレーダ型探査装置に対して好適に採用し得るSTC回路を提供すること。
【解決手段】 スキャン信号発生部2からのスキャン信号に基づいてランプ信号生成部4よりスローランプ信号が生成される。キャリア信号発生部1からのキャリア信号は、前記スローランプ信号により位相変調される。位相変調されたキャリア信号は波形整形回路9において、その立下がりもしくは立上がりが、より急峻となるように波形整形され、これにより発生する高次高調波が送信アンテナ11より送信される。受信アンテナ12により受信された受信信号はSTC回路29とFET28により利得制御される。この場合、STC回路29はキャリア信号に対して位相変調を行うための前記ランプ信号の波高値をそのまま利用するように構成されており、比較的単純な回路構成によって精度の高い利得制御動作が実現される。
(もっと読む)
ミリ波イメージング装置
【課題】画像を処理することにより、信号可干渉性に起因する歪みを除去した画像が得られるミリ波イメージング装置を提供する。
【解決手段】図1のミリ波イメージング装置は、受信されたミリ波により像を撮像する第1ミリ波帯撮像手段(SA1、D1)および第2ミリ波帯撮像手段(SA2、D2)と、
アンテナANT1、アンテナANT2、アンテナANT1が主軸上に配置される結像レンズ系LN1、アンテナANT2が主軸上に配置され、当該主軸が結像レンズ系LN1の主軸に平行な結像レンズ系LN2、を有するアンテナ送受信系とを備え、結像レンズ系LN1およびアンテナANT1からなる準光学系と、結像レンズ系LN2およびアンテナANT2とからなる準光学系の一方が他方に対し主軸方向にオフセットされていることで、ミリ波帯検波器D1の画像とミリ波帯検波器D2の画像を処理することにより、信号可干渉性に起因する歪みを除去した画像が得られる。
(もっと読む)
パルス諸元検出回路
【課題】 パルス諸元検出回路は、入力レベルに一定のスライスレベルを設定し、このレベルを越える信号が到来したとき、その諸元を解析する。しかし、このレベルを越えるノイズや他の電波などの混信入力があると、それらの諸元を解析してしまい、それらの混信がなくなるまで、いかに強力なパルスが到来してもパルス諸元検出を行うことができない。
【解決手段】 スライスレベル設定機能51がノイズレベルを越える第1のスライスレベルを設定し、レベル判定機能53が第1のスライスレベルを越える信号が到来したと判定したとき、諸元測定機能54がその諸元を解析する。また第1のスライスレベルを越える信号が所定の時間長さより長いCW信号であれば、この信号レベルより高い第2のスライスレベルを設定する。これによりCW信号に重なった信号が、CW信号より大レベル信号であれば、パルス諸元検出が可能となる。
(もっと読む)
インパルス無線周波数信号による3次元画像の生成
画像マトリクスの生成は、複数の点を有する空間に関する往復時間マトリクスにアクセスするステップを有する。往復時間マトリクスは、信号が送信アンテナから点へ、更に受信アンテナへ伝わる推定往復時間を表す。空間の対象から反射された信号は、受信アンテナで受信される。以下のステップは、複数の点の少なくとも一部に対して、画像マトリクスを生成するよう繰り返される:複数の点の一部から点を選択するステップ;夫々の受信アンテナに関して、受信アンテナにより受信された信号の波形を定めて、往復時間マトリクスに従って、選択された点に対応する定められた波形の波形値を確認するステップ;及び選択された点に関して画像値を得るよう、選択された点の波形値を結合するステップ。画像マトリクスは、画像値から生成される。  (もっと読む)
(もっと読む)
41 - 52 / 52
[ Back to top ]