
Fターム[5J070AD01]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナ単一 (1,358)
Fターム[5J070AD01]の下位に属するFターム
送受別体 (672)
Fターム[5J070AD01]に分類される特許
121 - 140 / 686
速度が曖昧な物標の非コヒーレント積分のための技法
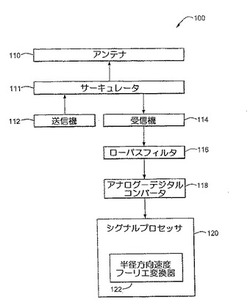
【課題】パルスドップラーレーダ信号を処理して物標を検出するための方法を提供する。
【解決手段】周波数ダイバーシティを有する信号を含む所定の周波数技術に従って、レーダシステムからレーダ信号を送信し、1つの周波数帯域内で、物標の速度を指示する周波数を有する物標エコー信号を含む信号を受信し、可変周波数スケールを有するフーリエ変換を用いて物標エコー信号を変換することを含む。
(もっと読む)
画像レーダ装置

【課題】位相補償精度を向上させて、再生画像の分解能を向上させた画像レーダ装置を得る。
【解決手段】レーダ観測器は、レンジプロフィールの取得処理を、目標との相対位置関係を変えながら繰り返し実行してレンジヒストリを取得する。レーダ画像化器は、レンジ補償器12と、レンジ補償器12によるレンジ補償後のレンジヒストリS1(r,h)上の代表的な複数の反射点の位相変化を調べ、レーダ画像のドップラー周波数方向のぼけの原因となるヒットに対する2次以上の不要位相変化の、最終的にクロスレンジ圧縮に用いるヒット幅の範囲での値を推定する不要位相変化推定器21と、不要位相変化推定器21で得られた不要位相変化φ2(h)に基づき、レンジ補償後のレンジヒストリS1(r,h)から、最終的にクロスレンジ圧縮に用いるヒット幅分だけ切出したレンジヒストリに含まれる不要位相変化成分を補償する位相補償回路22と、を備える。
(もっと読む)
レーダ装置、目標類別装置及び目標類別プログラム
【課題】ISAR画像における目標の一部が欠落している場合等において、目標の構造物間の絶対長を測定しなくても良好な類別結果を取得することが可能なレーダ装置、目標類別装置及び目標類別プログラムを提供する。
【解決手段】特徴点設定部531は、二つの指定特徴点間の基準距離に基づき、取得したISAR画像から基準相対位置情報を生成する。また、再計算部532は、記憶部60に記憶された複数の目標形状情報に基づいて、複数の相対位置情報サンプルを生成する。そして、類似度判定部533により、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を算出し、算出した類似度に基づいた目標形状情報を選択する。
(もっと読む)
移動体周辺監視システム
【課題】送信波を放射することにより障害物を検知する複数の検知センサを備えた移動体周辺監視システムにおいて、各検知センサ間の干渉を抑制し、検知精度の向上を図る。
【解決手段】各検知センサ2は、信号源20の発振周波数を掃引する周波数制御回路21と、上記発振周波数と同じ周波数の送信波を放射する送受信回路22と、電源制御回路24とを備える。電源制御回路24は、上記発振周波数が掃引される期間だけ、上記送信出力をオンし、他の期間は、上記送信出力をオフする。従って、いずれかの検知センサ2で上記発振周波数が掃引され上記送信出力がオンであるときに、他の検知センサ2で上記発振周波数が掃引されていなければ、他の検知センサの上記送信出力はオフされている。このため、各検知センサ2の送信波又は反射波と他の検知センサの送信波又は反射波との間の干渉の発生を防ぐことができ、検知センサ2の検知精度の向上を図ることができる。
(もっと読む)
移動体周辺監視システム
【課題】複数の距離測定センサを備えた移動体周辺監視システムにおいて、各距離測定セ
ンサにより高精度に障害物までの距離を測定し、しかも、製造コストを低減する。
【解決手段】移動体周辺監視システムにおいて、センサ制御装置は、各距離測定センサに
よる距離測定範囲に対応した周波数掃引幅の掃引パターンを記憶している。センサ制御装
置は、各距離測定センサに、その取付位置に応じて距離測定範囲を設定し、その距離測定
範囲に対応する周波数掃引幅の掃引パターンP1、P2、P3に従ってセンサ内の信号源
の発振周波数を掃引させる。これにより、各距離測定センサの取付位置に応じた夫々の距
離測定範囲で各距離測定センサにより高精度に距離を測定することができる。しかも、上
記掃引パターンはセンサ制御装置が記憶しているので、各距離測定センサはその構成を共
通化することができる。
(もっと読む)
距離測定装置
【課題】距離測定装置において、距離測定の信頼性の向上を図る。
【解決手段】距離測定装置においては、周波数制御回路により周波数掃引される送信波と反射波との合成波のパワーが検出され、その検出信号の周波数成分が、分析回路により分析され、その分析結果を基に距離が算出される。周波数制御回路は上記発振周波数の掃引を複数回行う。そして、各回に距離算出回路により算出される距離データのうち、全ての回に存在する距離データが距離判定回路により真値と判定される。これにより、複数回の発振周波数掃引のいずれかの回で、外来ノイズ又は干渉等に起因して、誤った距離データが距離算出回路により算出されたとしても、他の回の周波数掃引時に誤った距離データが算出されなければ、距離判定回路は誤った距離データを真値と判定しない。従って、真値と判定される距離データに誤差が生じ難くなり、そのため、距離測定の信頼性の向上を図ることができる。
(もっと読む)
誘導装置
【課題】
HPRF(High Pulse Repetition Frequency)の電波にて目標を探知・追尾する従来の誘導装置においては、メインローブクラッタと目標のドップラ周波数が重なる領域(ビーム領域)では、メインローブクラッタと目標の区別がつかず、メインローブクラッタを誤検出する可能性があるため、あらかじめメインローブクラッタの周波数領域を算出し、その領域内は探知しないようにしているため、クラッタのレベルが低く、実際は目標を探知できる場合があったとしても、探知できないという課題がある。
【解決手段】
従来は受信部と局部発振部が1セットであったが、複数の受信部と局部発振部のセットを有することで、目標からの反射信号とクラッタを弁別することができ、ビーム領域の目標を探知することを可能にするものである。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、目標とクラッタをドップラ周波数で分離し、狭帯域フィルタを通過した目標の電力で利得制御を行っていたため、電力が大きいクラッタを受信した時に、受信系が飽和するという問題があった。
【解決手段】 受信系の初段に阻止帯域の異なる複数のノッチフィルタを備え、外部に備えた速度センサ及び姿勢角センサからの情報をもとにクラッタ周波数を計算し、適合する阻止帯域のノッチフィルタを選択する。選択したノッチフィルタは、受信した目標信号のみ通過させ、クラッタを減衰させる。これにより、クラッタにより受信系が飽和する問題を解消する。なお、受信系の初段にフィルタを配置すると、NFが劣化し、低S/Nの目標の検出が困難になる問題があるため、高度が低くクラッタ電力が大きい時のみ、ノッチフィルタを通過させるよう、切換えを行う。
(もっと読む)
内蔵型レーダ用送受一体アンテナ
【課題】水平方向における放射パターンの広覆域化を実現し、かつ不要波を抑制しながら高周波回路部品をアンテナ基板に集積させることでスペースファクタを改善した内蔵型レーダ用送受一体アンテナを提供する。
【解決手段】第1誘電体基板111が3層構造に形成されており、MICのバイアス線路171が第2層111bと第3層111cとの間に配置され、第1層111aと第2層111bとの間に第2地板114が配置されている。また、隔離スルーホール163、164と第2地板114とが導電可能に接続されており、これにより給電ポート115が配置されている領域とバイアス線路171が配置されている領域Bとが隔離された構造となっている。
(もっと読む)
航空機用気象レーダの多機能フロントエンド
【課題】本発明の課題は、1ユニット化した受信部と、送信部を1モジュール内に収納して多機能フロントエンド部を構成することにより、高周波経路の最短化が図れ、小型化、軽量化及び電力効率向上を可能することにある。
【解決手段】本発明は、高周波の送信信号もしくは受信信号が入出力される入出力端を備えるサーキュレータ32及びサーキュレータ32の出力端に直列接続されるスイッチ41、リミッタ33、低雑音増幅器34、周波数変換用ミキサ35,38を1ユニット化した受信部42と、サーキュレータ32の入力端に直列接続される固体化増幅方式の高周波電力増幅器36及びバンドパスフィルタ37よりなる送信部43とを具備し、受信部42と送信部43を1モジュール内に収納することを特徴とする。
(もっと読む)
レーダ装置
【課題】クラッタの比較的強い環境下で観測信号を取得した場合でも、高精度に目標信号を抽出することのできるレーダ装置を得る。
【解決手段】電波を送受信して観測信号を取得するレーダ信号取得部10と、観測信号に基づき、抽出対象となる目標の大きさのウィンドウを用いた移動平均処理により各レンジビンにおける平均値を算出する移動平均処理部40と、移動平均処理部40で算出した各レンジビンの平均値を比較し、目標信号が位置する領域を抽出する目標信号切出し処理部50と、目標信号切出し処理部50からの出力結果を格納する出力格納部60とを備えている。
(もっと読む)
アンテナ装置およびレーダ装置
【課題】小型で軽量な長尺状アンテナを実現する。
【解決手段】長尺形状の二次元スロットアンテナ20の短辺方向に沿った放射面と反対側の背面には、モード変換用導波管30が設置される。モード変換用導波管30は、二次元スロットアンテナ20の背面との間に形成された給電用スロット301により結合し、二次元スロットアンテナ20へ送信電力を給電する。モード変換用導波管30には第1導波管40が当接して配置されており、モード変換用導波管30と第1導波管40は導波管結合部材34を介して結合している。第1導波管20は前記長尺の方向に沿って延びる形状からなる。さらに、長尺方向に沿って見て、二次元スロットアンテナ20が略中心となり、二次元スロットアンテナ20の長辺の長さに略等しい直径の略円形断面からなるレドーム10が設置される。
(もっと読む)
障害物検出装置
【課題】低コストで障害物の存在方向を検出可能とする障害物検出装置を提供する。
【解決手段】車両に搭載され、当該車両周囲の障害物を検出する障害物検出装置であって、車両の周辺に検出波を照射し、当該車両の周辺に存在する障害物から反射された反射波に基づいて当該障害物までの距離を検出する距離検出手段と時刻t1において距離検出手段から取得した障害物までの距離を第1の距離とし、時刻t1から所定時間経過後の時刻t2おいて距離検出手段から取得した障害物までの距離を第2の距離として、当該第1の距離および当該第2の距離の差分値に基づいて当該障害物の存在方向を算出する方向算出手段とを備える障害物検出装置である。
(もっと読む)
信号処理装置、レーダ装置、車両制御システム、および、信号処理方法
【課題】移動物データのペアリングの正誤を確認する技術に関する。
【解決手段】
静止物の検知点を構成するピーク信号をマップ上の複数の領域に分類した後に、検出された移動物の検知点をこのマップ上に分類する。そして、移動物の検知点の該当した位置が静止物の検知点を構成するピーク信号の数が所定の閾値以上となる領域内に該当した場合は、移動物の検知点を特定検知点として判定する。これにより、移動物データの検知点のペアリング処理の正誤を確認できる。
(もっと読む)
目標類別装置
【課題】 類別するクラス(トラック、戦車、小型機 等)が増えるに従って類別処理が複雑化するため類別確率(類別結果が正しい確率)が低下する。
【解決手段】 目標が存在する地形の種類毎に当該地形に存在する目標の目標データを予め格納した参照データベースとを備える。目標の存在する地形に応じて、この参照データベース内の目標データを変更することで類別を行う。これにより、クラス(戦車、トラック、小型船 等)が増えても類別処理が複雑化することを避け、類別確率の低下を防ぐことができる。
(もっと読む)
画素データ生成装置、画像表示装置、レーダ装置、画素データ生成方法及び画素データ生成プログラム
【課題】レーダ装置等の画像表示装置が備える画素データ生成装置において、周方向を考慮した補間データを画素抜け部分に漏れなく描画できる構成を提供する。
【解決手段】レーダ装置の画像表示装置が備える画素データ生成装置は、エコー強度計算部と、補間内容生成部と、を備える。エコー強度計算部は、スイープラインS1上のサンプルデータと、スイープラインS2上のサンプルデータと、をXY直交座標系の画素データにそれぞれ変換する。補間内容生成部は、XY直交座標系のX軸又はY軸に平行な補間対象ライン上にある注目画素と、同一の補間対称ライン上にある対応画素と、の間に位置する対象画素の画素データを生成する。この対象画素の画素データは、スイープラインS1上の画素データとスイープラインS2上の画素データとに基づいて生成される。
(もっと読む)
超広帯域無線通信測距装置、測距方法、時間間隔検出装置
【課題】高速なサンプリング信号を用いることなく、測距の距離分解能を向上させる。
【解決手段】受信系統において、スペクトラム拡散変調信号が空間に送信された時刻である第1時刻(Tr)を得て、スペクトラム拡散変調信号の同期ポイントから第2時刻(Ds)を得て、第1時刻においてクリアされ、クロック信号でカウントアップされ、第2時刻においてカウントアップが停止されるメインカウンタ163と、少なくとも第2時刻でラッチしてk個の1ビットの信号を得る、クロック位相器164からクロックが供給されるサブカウンタ162と、を備える、超広帯域無線通信測距装置とした。
(もっと読む)
マルチラテレーションシステム、マルチラテレーション受信局の信号処理方法、及びその処理プログラム
【課題】複数の航空機の位置情報を抽出するマルチラテレーションシステムにあって、各モードA/C機からの応答情報を不規則に選択処理しシステム負荷の軽減を図ること。
【解決手段】航空機(目標物)が搭載するトラスポンダからのスキッタ信号若しくはSSR応答信号を受信する複数の受信局1,2,…と、この受信された各信号の到達時間差から目標物の三次元位置情報を算出し且つ目標物の識別情報を得る位置情報算出手段(センタ局)120とを備え、各受信局1,2,…は、受信したSSR応答信号を情報分析するSSR応答デコード手段12と、ここで得られたモードSスキッタ,モードS応答,及びモードA/C等のメッセージに編集してセンタ局へ出力するメッセージ生成手段13とを備え、モードA/Cを経時的に不規則に選択して前記メッセージ生成手段13に送り込むモードA/C信号間引手段14を設けたこと。
(もっと読む)
レーダ装置、レーダ信号処理方法及びレーダ信号処理プログラム
【課題】パルスレーダで目標の速度を正確に検出しようとする場合、複数のPRFのパルス信号から位相回転量を算出し、PRFごとの位相回転量の組み合わせから速度検出を行う。このような関連技術のレーダでは、PRFごとにドップラ周波数分解能が異なるため、何度も折り返るような高速目標の場合は速度検出精度の差に依存する誤差が無視できなくなり、速度の検出を誤ってしまうという課題がある。
【解決手段】本発明は、前記課題を解決するために、利用する複数のPRF間で等間隔なドップラ周波数分解能を得ることのできるようPRFを制御するPRF制御器11と、PRFを等間隔なドップラ周波数分解能ごとの受信信号に分離する等間隔ドップラ周波数分離器16とを備えることにより、誤差のない速度検出を行うことを可能とする。
(もっと読む)
目標検出装置及び目標検出方法
【課題】目標検出の誤警報の低減を図り得るレーダ装置の目標検出装置を提供する。
【解決手段】目標検出部において、事前に受信ビデオ信号からクラッタの分布を形状パラメータ及びスレッショルド算出処理部162にて推定し、さらに擬似的な目標を示すテストセルを含めた形状ペラメータに対応するスレッショルドをレーダの1スキャンごとにスレッショルドメモリ163に記憶しておき、検出判定部165により、このスレッショルドメモリ163に記憶されたスレッショルドを利用して、ワイブルCFAR処理部164による処理から目標を検出するようにしている。
(もっと読む)
121 - 140 / 686
[ Back to top ]