
Fターム[5J070AD02]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナ単一 (1,358) | 送受別体 (672)
Fターム[5J070AD02]に分類される特許
661 - 672 / 672
周波数変調レーダー装置
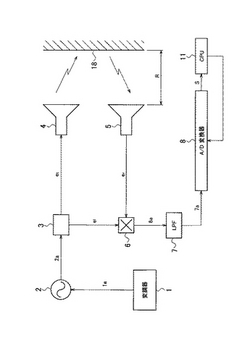
【課題】 近距離にある物標までの距離を計測することができる周波数変調レーダー装置を提供する。
【解決手段】 周波数変調されたFM信号2aを電力分配器3で送信信号etと基準信号elとに分配し、物標18で反射された受信信号erと基準信号elとを混合器6で混合し、両信号の時間差で生じるビート信号Sを検出する。このビート信号Sが送信角周波数ωに対して2次微分方程式で表現されることを利用して、CPU11が物標18までの距離Rを算出する。
(もっと読む)
短いパルス/ステップ周波数のレーダシステム

短いパルス、ステップ周波数、センターライン処理を組合わせた特有のハードウェアアーキテクチャである。本発明のアーキテクチャは短いパルスを送信する送信機と、そのパルスを受信してそれに応答して出力信号を提供する受信機とを有するレーダシステムを構成しており、各パルスは周波数がステップされている。例示的な実施形態では、送信機は周波数ソースと、そのソースに結合されたRFスイッチと、RFスイッチを制御する制御装置とを含んでいる。受信機はセンターラインラフィングフィルタで構成されている信号プロセッサを含んでいる。その信号プロセッサはそれぞれ距離ゲートとデジタルフィルタを有する多数のチャンネルを有している。デジタルフィルタは距離ドップラマトリックスを出力するように構成された高速フーリエ変換を含んでいる。 (もっと読む)
レーダ装置
送信部は、所定幅のトリガパルスによってパルス変調された所定の周波数を有するレーダ波を探査対象空間に発射する。受信部は、前記レーダ波の反射波を受信して受信信号を出力する。ローカルパルス発生部は、遅延部によって遅延された前記トリガパルスによってパルス変調された前記所定の周波数を有するローカルパルス信号を出力する。相関値検出部は、前記受信信号とローカルパルス信号との強度についての相関値を検出する。遅延時間可変部は、前記遅延時間を、前記トリガパルスの発生周期である前記所定周期の範囲内で順次変化させる。相関値記憶部は、可変される遅延時間毎に検出される前記相関値を記憶する。度数分布作成部は、記憶された相関値の前記遅延時間に対する度数分布を作成する。探査制御部は、作成された度数分布に基づいて、前記探査対象空間についての解析を行う。 (もっと読む)
レーダ装置
送信信号を放射するアンテナと、物体から反射された送信信号を受信する複数のアンテナの各出力端子を入力端子に第1の周期で択一的に順次切替接続する第1の切替スイッチ部と、各アンテナからの受信信号を前記送信信号の一部を用いてダウンコンバートする第1のダウンコンバート部と、第1のダウンコンバート部の出力に接続された低域カットフィルタと、該フィルタの出力を複数
のA/D変換器に択一的に順次切替接続する第2の切替スイッチ部と、複数のA/D変換器からの出力を入力し所定の処理を施して前記物体までの距離又は前記物体との相対速度を検出するディジタル信号処理部とを有し、第1の切替スイッチはアンテナと接続中に第1の周期より短い第2の周期でON−OFF制御を行う、DBF型のレーダ装置。
(もっと読む)
自動車安全装置用の物体認識装置および方法
本発明は、少なくとも1つの電磁波(12)を発生するために構成されている信号源(11)および障害物(16)から反射される少なくとも1つの電磁波(18)用の受信機(14)を備えた自動車搭乗者保護システム用物体認識装置に関する。本発明によれば、評価装置(20)が設けられて、障害物(16)から反射されかつ受信機(14)によって受信される少なくとも1つの電磁波(18)の偏波を評価し、かつ少なくとも1つの評価信号(22)を発生するように構成されている。それにより、例えば表面構造のように障害物に関する付加的な情報を得て、自動車搭乗者保護システムのために使用することが可能である。 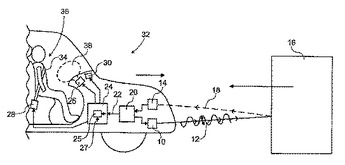 (もっと読む)
(もっと読む)
処理装置および対象物検出装置
検出対象の接近に伴い変動する電気信号を生成するセンサ10に接続され、上記電気信号を処理する処理装置11であり、前記検出対象の接近に伴い変動する電気信号と前記電気信号よりも周波数の高い高周波信号とが重畳した信号から前記電気信号を抽出する手段7と、前記電気信号の波形から前記検出対象の接近を判定する手段8とを備える (もっと読む)
前方監視MM波地形回避レーダを有するレーダ高度計
レーダ信号を送信するための送信器(12)と、反射レーダ信号を受信するための受信器と、送信器および受信器の一方または両方に結合された少なくとも1つのアンテナ(20、24)とを含むレーダ高度計(10)について述べる。高度計はまた、走査運動で運動するように構成された前向きミリメートル波(MMW)アンテナ(34)、MMWアンテナ、送信器、および受信器に結合された周波数アップ/ダウンコンバータ(18)、ならびにレーダ信号プロセッサ(30)を含む。コンバータは、MMWアンテナを介して送信するために、送信器から受け取った周波数をMMW周波数にアップコンバートし、受信された周波数を、受信器に出力されるレーダ周波数にダウンコンバートする。レーダ信号プロセッサは、MMWアンテナの走査運動を制御し、走査運動の一部分についてアンテナ部で受信された信号を処理し、走査運動の他の部分についてMMWアンテナ部で受信された信号を処理する。 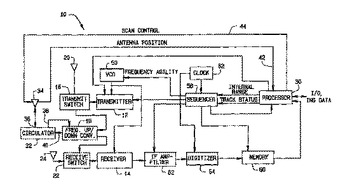 (もっと読む)
(もっと読む)
時間領域のインパルス状の信号に基づく物体の高速な検出装置及び方法
超広帯域(UWB)RF信号を用いてターゲット領域における関心物体を検出するための方法及びシステムが開示されている。トランスミッタとアンテナアレイは、関心物体を含んでいるかもしれないターゲット領域を探査するために用いられる、超広帯域RFインパルス状信号を生成する。アンテナと信号処理手段は、ターゲット領域からの応答信号を受信し、一群の座標を生成するために応答信号を処理する。応答信号と既知の物体との間に対応が存在するか否かを決定するために、処理された応答信号の座標は、既存のデータベースにおける既知の物体の座標と比較さる。対応を示すものが存在する場合、既知の物体の存在が、システムのオペレータへ表示される。 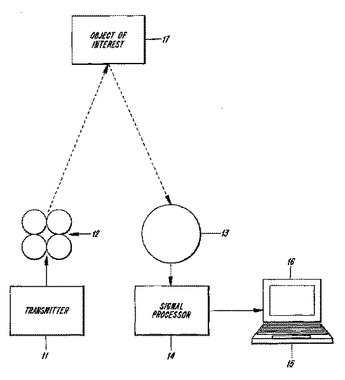 (もっと読む)
(もっと読む)
静止状態で高度計を自己試験するためにドップラー信号をシミュレートするための方法および装置
静止状態の下でドップラー信号をシミュレートするための方法が記述される。この方法は、反射信号周波数の整数倍数と反射信号周期の分数との和でレーダー反射信号をサンプリングするステップ(154)と、サンプルからベースバンド信号(152)を生成するステップとを含む。  (もっと読む)
(もっと読む)
レーダ装置及び遅延時間測定方法
【課題】 通常の変換能力を有したA/D変換器等を利用して、距離分解能を向上する。
【解決手段】 カオスコード発生部30が出力する周期f/nのカオス信号から、遅延回路31が(k−1)/(2f)だけ基準の時点(基準点)から遅延させて、ずらしながらn個取り出し、これにより搬送波を変調してn個の信号波を生成し、対象物に放射し、対象物で反射して受信されたn個の反射波からn個のベースバンド信号を得て、これをそれぞれ周期2f/nでA/D変換器44がディジタル信号に変換し、その周期に合わせてn個のディジタル信号を合成し、疑似的な周波数fのカオス信号に対応するベースバンド信号を生成する。同様に、遅延回路31が出力するn個のカオス信号から周波数fの疑似的なカオス信号を生成し、ベースバンド信号に基づくディジタル信号と、当該疑似的なカオス信号に基づくディジタル信号との相関演算により、反射波の遅延時間を測定。
(もっと読む)
標識設置方法
【課題】 車両の前方を監視するセンサの取付角度を調整する基準点をなす標識を設置する標識設置方法において、センサを車両に取付る角度の調整が、その前方に広大な空間を必要とすることなく、狭い空間であっても簡易かつ正確に実施できる標識設置によるセンサの取付角度調整方法を実現することを課題とする。
【解決手段】 紐23の一端をトランクカバー12に固定し、トランクカバー12を開いた状態で、紐23を車両10に付された基準点上を通過するように車両前方に延ばし、車両前方に延ばされた紐23を基準にして標識21を設置することを特徴とする。
(もっと読む)
ドップラ式対地速度計
【課題】 ドップラシフト測定用の送信波の入射角および反射波の反射角が変化して測定ドップラシフト値ひいては、それから演算される速度値に影響を及ぼすことを防止し、常に高精度の速度測定を行う。
【解決手段】 超音波もしくは電波である送信波(4)を路面(5)に向けて照射し、反射波(6)のドップラ効果による周波数偏移を検出して、対地速度(V)を測定する速度計において、送信器(3)からの送信波(4)をオフセットパラボラ型の反射器(10)で反射させて路面(5)に当て、路面からの反射波(6)を別のオフセットパラボラ型反射器(12)で反射させて受信器(7)で受信する。
(もっと読む)
661 - 672 / 672
[ Back to top ]