
Fターム[5J070AD03]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナのいずれかが複数 (1,035)
Fターム[5J070AD03]の下位に属するFターム
主及び副アンテナで構成 (16)
送信・受信アンテナが何れも複数 (454)
受信アンテナのみが複数 (476)
Fターム[5J070AD03]に分類される特許
41 - 60 / 89
電波センサ
【課題】センサ前方に存在する被検知体の有無や移動状態を精度良く検出する、S/N比に優れた低消費電力、且つ小型の電波センサを提供する。
【解決手段】送信信号を生成する発振回路9と、誘電体からなる基板1の一方の表面または内部の略全面に形成された送信信号のグランドとして作用する接地電極2と、他方の表面に形成された、送信信号を電波ビームとして前方に放射し、被検知体に衝突し反射して戻ってきた電波ビームを受信信号として受信する矩形状の送受信電極31と、何れか一方の端子が接地電極2のみに接続され、送受信電極31にて受信した受信信号を検波する検波素子5と、検波素子5にて検波された受信信号を外部に出力する出力線路6とを備え、検波素子5の他方の端子と出力線路6は送受信電極31の異なる位置に各々、接続される。
(もっと読む)
レーダ装置、レーダの制御方法、およびプログラム

【課題】操作員が指定した特定方位の目標探知性能や方位分解性能を向上させ、かつ1つの空中線部が機能喪失しても残りの空中線部で方位全周を監視できるレーダ装置を提供する。
【解決手段】フェーズドアレイアンテナを有する空中線部の方位を機械的に変更させるための空中線駆動部を設ける。さらに、各空中線駆動部を制御するための制御データを生成する空中線駆動制御部を設ける。これによって、操作員が表示・操作部から特定方位を指定すると、空中線駆動制御部が、その特定方位にビーム形成するアンテナ開口およびアンテナ素子数を増大させるように空中線部の設定方位を計算し、空中線駆動部を制御して所望の空中線部を回転させる。また、操作員が表示・操作部から機能を喪失した空中線部を指定すると、空中線駆動制御部が空中線駆動部を制御し、機能を喪失した空中線部を除く全ての空中線部によって方位全周の監視を継続的に維持させる。
(もっと読む)
無線測位装置、無線測位システム、及び無線測位方法
【課題】異なる位置に存在する複数の無線端末の測位を行う場合に、短時間でゲインを制御できる無線測位装置、無線測位システム、及び無線測位方法を提供すること。
【解決手段】基地局100において、ゲイン制御部109が、予め用意されている対応テーブルに基づいて、経過時間に応じて、増幅部111に対する設定電圧を設定する。これにより、フィードバック制御を行うことなく増幅部111のゲインを調整できるので、短時間でゲインを制御できる。また、増幅部111のゲインは、経過時間が大きくなる程、大きく設定される。これにより、送信元の測位対象無線端末200が遠くにあり、応答パルス信号の受信電力が小さい程、その応答パルス信号を大きな利得で増幅できる。従って、測位対象無線端末200が複数の場合でも、応答パルス信号のレベル調整を適切且つ短時間で行うことができる。
(もっと読む)
通信検出システムにおいて位相差およびドップラー効果に対する耐性を得るための方法および装置
マルチユーザ同時信号送信システムにおいて干渉を減少するための符号化および復号化方法および装置。本発明は、伝送媒体で信号を送受信する必要がある任意のシステムに適用されるときに、送受信される信号間の位相差による影響をなくすことができるようにし、かつ異なる送信機および受信機の速度差によって生じるドップラー効果をなくすことができるようにする符号化および復号化方法および装置を提供する。この方法は、現在のシステムよりも空間分解能が大きく、かつ計算力が低い検出システム(レーダー、ソーナー分光法、NDTなど)を設計できるようにすることによって、前記影響を低減できるようにする。同様に、データフローが受信される際の位相とは無関係に複数の直交データフローの同時通信を行う必要があるシステムでは、この方法はまた、受信機に到達する際の位相およびドップラー効果とは無関係に多元接続干渉を打ち消すことができるようにする。最後に、この方法は、信号の送信と受信を同時に行うことができるようにし、したがって、パルス圧縮を使用するシステムにおける測定間のブラインド時間をなくすことができるようにする。 (もっと読む)
車両のためのFMCWレーダセンサ
車両のためのFMCWレーダセンサであって、レーダ信号を生成し送信し受信するための高周波ユニットと、送信されたレーダ信号の変調を制御するための変調素子(36)と、受信されたレーダ信号から形成される中間周波数信号(22)のための少なくとも1つのアナログ事前処理段(48)と、少なくとも1つのアナログ/デジタル変換段(50)と、変調素子(36)を駆動し、アナログ/デジタル変換段(5)のデジタル信号をさらに処理するためのプロセッサとを有する、FMCWレーダセンサにおいて、変調素子(36)と、事前処理段(48)と、アナログ/デジタル変換段(50)とは、1つの半導体モジュール(12)に組み込まれ、半導体モジュール(12)はさらに、半導体モジュールの構成要素を設定し監視するための監視素子(12)およびレジスタ(44)と、プロセッサへのインタフェース(52)を有する、FMCWレーダセンサに関する。 (もっと読む)
電波センサ
【課題】電波ビームの放射方向を制御しS/N比に優れた低消費電力、且つ小型の電波センサを提供する。
【解決手段】送信信号を生成する発振回路と、誘電体からなる基板1の一方の表面または内部の略全面に形成された送信信号のグランドとして作用する接地電極と、他方の表面に形成された、送信信号を電波ビームとして前方に放射する矩形状の少なくとも一対の送信電極3a〜3dと、送信電極3a〜3dから放射され被検知体に衝突し反射して戻ってきた電波ビームを受信信号として受信する矩形状の受信電極4と、何れか一方の端子が接地電極のみに、他方の端子が受信電極4に各々接続され、受信電極4にて受信した受信信号を検波する検波素子とを備え、一対の送信電極3a〜3dは受信電極4に対して対称で、且つ一対の送信電極3a〜3dの各中心点を結ぶ直線の中心と受信電極4の中心点が一致する位置に、受信電極4を配置する。
(もっと読む)
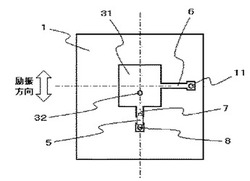
検波装置
【課題】センサ前方に存在する被検知体の有無や移動状態を精度良く検出する、S/N比に優れた小型の検波装置を提供する。
【解決手段】誘電体からなる基板1の一方の表面または内部の略全面に形成された電波ビームのグランドとして作用する接地電極2と、他方の表面に形成された、送信電極から放射された電波ビームを受信信号として受信する矩形状の受信電極4と、何れか一方の端子が接地電極2のみに接続され、受信電極4にて受信した受信信号を検波する検波素子5と、検波素子5にて検波された受信信号を外部に出力する出力線路6とを備え、検波素子5の他方の端子と出力線路6は受信電極4の異なる位置に各々、接続される。
(もっと読む)
電波センサ
【課題】センサ前方に存在する被検知体の有無や移動状態を精度良く検出する、S/N比に優れた電波センサを提供する。
【解決手段】送信信号を生成する発振回路と、誘電体からなる基板1の一方の表面または内部の略全面に形成された送信信号のグランドとして作用する接地電極と、基板1の他方の表面に形成された、送信信号として電波ビームを前方に放射する矩形状の複数の送信電極3a、3bと、複数の送信電極から放射され被検知体に衝突し反射して戻ってきた電波ビームを受信信号として受信する矩形状の受信電極4と、受信電極4にて受信した受信信号を検波する検波素子5と、検波素子5にて検波された受信信号を外部に出力する出力線路とを備え、複数の送信電極3a、3bを電力均等分配回路となる伝送線路にて相互に接続し、個々の送信電極に伝播される送信信号の電力を小さくする。
(もっと読む)
タグの三次元位置検出システム
【課題】タグの三次元位置を確実に検出可能なタグの三次元位置検出システムを提供する。
【解決手段】タグの三次元位置検出システムは、平面上に設けられ、所定のトリガ信号を出力するトリガアンテナ16と、トリガアンテナ16の出力したトリガ信号の一部をキャンセルするキャンセル信号を出力するキャンセルアンテナ17、キャンセル信号によって一部がキャンセルされたトリガ信号を用いて、トリガ信号に応答するタグの上方向の位置を検出する制御部11とを含む。
(もっと読む)
車両移動状況検出装置および車両移動状況検出方法
【課題】 自車両の進行に関する方位と対地車速を正確に検出し物体への接近を確実に回避する。
【解決手段】複数の側方監視用レーダ装置21,22を用いて、静止物体を識別する。静止物体RM1,RM2の方位および相対速度の検出値に基づいて空間的に密集して存在する物体を静止物体RM1,RM2と判定し、該判定された静止物体を成す物体(反射点)のうち自車両から最至近に位置する物体T11,T21に関する方位および相対速度の情報に基づいて物体との接近の蓋然性を判断し、車両制御装置50にこの蓋然性低減のための信号を供給する。
(もっと読む)
レーダ装置
【課題】MUSIC法を用いた方位推定に際し、不等間隔アレーアンテナを採用することによって生じる非所望ピークの影響を抑え、高精度に物標方位を推定可能にすること。
【解決手段】レーダ装置は、受信信号に基づき自己相関行列を算出すると共に(S110)、当該行列の固有値を求め(S120)、閾値より大きい固有値の数から到来波数Mを推定する(S130)。また、各固有値に対応する固有ベクトルを用いて、MUSICスペクトルを算出し(S160)、MUSICスペクトルから、推定した到来波数Mより所定量α多い数のピークを抽出する。そして、各ピークに対応する方位を、検査対象方位に設定する(S170)。そして、検査対象方位のステアリングベクトル間の相関を、高低の二段階で判定し、相関が高い場合には、電力推定対象に設定する方位の数M’を、M+αに設定し、相関が低い場合には、数M’を、推定した到来波数Mに設定する。
(もっと読む)
レーダ装置、補償量算出方法
【課題】複数の送信チャンネル又は受信チャンネルを有するレーダ装置において、装置規模を増大させることなく、送信チャンネル又は受信チャンネル間の特性差を、長期間に渡って安定して補償できるようにする。
【解決手段】2チャンネル分の受信回路を集積した複数の受信用IC42,43を用いてレーダ装置1を構成する。同一チップ(受信用IC)に属する隣接した受信チャンネル間の位相差Δθ12,Δθ34が一致している場合に、単一物標からの反射波に基づく受信信号であるものと判断して、補償量算出用データΔθdの算出を行う。この時、受信チャンネル間の特性差の影響を受けないデータとして、上述の位相差Δθ12,Δθ34を用い、受信チャンネル間の特性差の影響を受けるデータとして、互いに異なるチップに属する隣接した受信チャンネル間の位相差Δθ23を用い、これらに基づいて補償量算出用データΔθd、ひいては補償量Δθhを算出する。
(もっと読む)
レーダークロスセクション測定システム
【課題】航空機等のレーダークロスセクションの測定を対象物からの近傍界で行え、かつ小さなアンテナで行えるようにする。
【解決手段】複数の小さなアンテナの集合によって、大きなアンテナを形成し、コンパクトレンジ法を実現する。そして、小さなアンテナ間の補正のために対象物またはアンテナを移動させて、小さなアンテナ間のデータを補正する。
(もっと読む)
マルチスタティックレーダ装置
【課題】パルス間コヒーレント積分を行い、処理量を少なくすることができ、目標検出性能を改善することができるマルチスタティックレーダ装置を得る。
【解決手段】第1の受信ビデオ信号から目標とレーダとの相対速度を算出し、各時刻の相対速度から目標との初期相対速度、相対加速度を算出し、相関演算することにより生成された信号の目標までの距離が同一になるような速度補償量を目標とレーダとの初期相対速度、相対加速度を用いて算出し、速度補償量を用いて第2の受信ビデオ信号の位相を補償し、速度補償された第2の受信ビデオ信号を相関演算する。
(もっと読む)
移動目標検出装置
【課題】移動目標の検出性能の低下を抑えて、移動目標の検出及び速度推定を実施することができる移動目標検出装置を得る。
【解決手段】プラットフォームの移動方向に分割可能な開口を持つアンテナを用いて取得された2つの受信信号をそれぞれ格納するデータ格納部1、2と、データ格納部1、2に格納されたレーダ画像2枚分の受信信号についてそれぞれ距離方向に圧縮するレンジ圧縮処理部10A、10Bと、2つのレンジ圧縮後のデータをもとに移動目標を検出する移動目標検出部20と、検出された移動目標の各観測時刻におけるアンテナとの距離から目標速度を推定する目標速度粗推定部50とを設けた。
(もっと読む)
測角装置
【課題】アンテナ素子単体の指向性の影響を軽減して高精度の測角が可能な測角装置。
【解決手段】複数のアンテナ素子11〜13が配置されたアンテナ装置1と、アンテナ装置に含まれる近接したアンテナ素子からのアンテナ素子信号に基づき位相モノパルス方式またはスクイント測角方式により粗測角を行う粗測角器4と、粗測角器で得られた粗測角の方向に精測角用ビームを指向させるビーム形成部3と、ビーム形成部により指向された精測角用ビームを用いて、アンテナ装置に含まれる離隔したアンテナ素子からのアンテナ素子信号に基づき位相モノパルス方式またはスクイント測角方式により精測角を行う精測角器5を備える。
(もっと読む)
位置認識混合現実感ゲームプラットフォーム
【課題】ユーザの現実の環境に応じたゲーム内環境を提供する。
【解決手段】システムは、ユーザの周囲のレイアウトを求める。このシステムは、ユーザの位置及び/又は近くの物体104〜110を検出する。次に、このシステムは、求めたレイアウトに対して仮想的なコンテンツを関連づけるとともに、ゲームのルールの集合をその仮想的なコンテンツに関連づける。そして、このシステムは、ゲームのルールとコンテンツとに基づいて、視覚的及び聴覚的なゲーム表現をユーザに対して生成し、これによりユーザが自分の周囲の環境と自分の位置とに対応したゲームをプレイすることを可能にする。
(もっと読む)
センサ統制システム
【課題】探知覆域の組合せ数が増大した場合でも計算機リソースの制限を考慮して探知覆域の最適化処理の高速化および効率化を図る。
【解決手段】探知覆域算出部は、同一センサに対する各探知性能値テーブルのメッシュ配列を分割した各ブロックにおける所定位置の1メッシュのみを対象として各テーブルの探知性能値を加算し、全センサにおいて加算値が最良のメッシュを持つセンサを選択し、当該センサにおいて、最良メッシュを含む近傍の複数メッシュを対象として対応する各テーブルの探知性能値をそれぞれ加算し、その加算値が最良なメッシュを選択してそのメッシュの方位・仰角を当該センサの探知覆域の方位・仰角と決定し、決定した方位・仰角に基づいて該当センサの距離覆域を算出し、算出した距離覆域と決定した方位・仰角に基づいて該当センサの覆域形状を算出する。
(もっと読む)
レーダ用空中線装置
【課題】レーダ用空中線装置の動作を安定化させる。
【解決手段】複数のアンテナ4−1〜nと、アンテナ4−1〜nそれぞれに設けられ、アンテナ4−1〜nから高周波信号をパルス送信する複数の送信モジュール10−1〜nと、トリガ信号及びゲート信号を複数の送信モジュールに分配するマザーボード1とを具備し、複数の送信モジュール10−1〜nそれぞれは、トリガ信号にしたがってクロック信号を生成するクロック生成回路22と、トリガ信号によって起動し、上記ゲート信号にしたがって上記生成されたクロック信号に同期する電源生成回路21と、生成されたパルス電源を用いて高周波信号を増幅する高周波増幅回路3とを備える。
(もっと読む)
検知システムおよび検知方法
【課題】遮蔽物の有無に影響されず安定した動作と狭い範囲に限定した検知を可能とした検知システムおよび検知方法を提供する。
【解決手段】送信部1は、CPU3と、RF処理部4と、高周波スイッチ5と、アンテナA6と、アンテナB7と、から構成される。受信部2はCPU8と、RF処理部9と、アンテナC10と、から構成される。送信部1から所定の時間長さで交互に切替えて送信された送信波A12と送信波B11を受信部2により受信し、送信波A12と送信波B11の両者の受信強度の差分に基づいて受信部2が所定の範囲内に位置しているか否かを判定する。
(もっと読む)
41 - 60 / 89
[ Back to top ]