
Fターム[5J070AD05]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナのいずれかが複数 (1,035) | 送信・受信アンテナが何れも複数 (454)
Fターム[5J070AD05]に分類される特許
441 - 454 / 454
レーダ装置
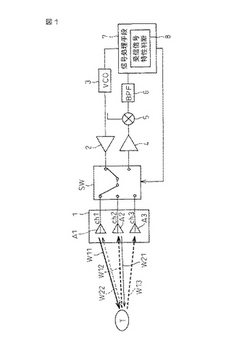
【課題】 本発明は、通常動作時でも、各アンテナの受信特性変化を判断し、補正処理を行い、工場出荷時の初期調整で補正でき、また、動作中の環境変化による温度変動に、或いは経年劣化に対応して随時補正でき、常に精度向上を図れるレーダ装置を提供する。
【解決手段】 複数の送受信アンテナで、送信波のターゲットTからの反射波を受信し、方位検出、距離測定、速度測定の認識処理を行うレーダ装置で、例えば、アンテナA1からの送信波W11が反射波W12としてアンテナA2で受信され、次に切替えられ、アンテナA2からの送信波W21が反射波W22としてアンテナA1で受信される。送信波W11と反射波W12の経路と送信波W21と反射波W22の経路とは同一空間系を有し、反射波W12の受信信号と反射波22の受信信号とが同じ周波数特性、位相を有することを利用してアンテナの受信特性変化を判断し、該結果で受信信号を補正処理する。
(もっと読む)
アンテナの同期回転装置

【課題】 航空機の管制に使用する空港面探知レーダ等のレーダシステムは複数のレーダ装置を使用する。このとき複数のアンテナは互いに同期して回転させなければならない。そのため一つの角度信号を複数のレーダ装置に配信しなければならず、配線設備コストが高くなるという課題があった。複数の空中線に対し角度信号を分配することなく、同期回転することができるレーダシステムを提供する。
【解決手段】 電波時計など、既設の無線放送波を利用して校正できる高精度な時計装置12aを設け、この時計装置12aの時刻信号に同期する同期回路3aを空中線9a毎に設ける。各レーダ装置の空中線毎に角度信号の伝送を行うことなく、複数空中線の同期回転装置を実現する。
(もっと読む)
障害物検知装置
【課題】 設置の自由度がより高い障害物検知装置を提供すること。
【解決手段】 障害物検知装置1において、車体表面に取り付けられており、自らが放射した放射波の反射波を受信可能な送受信部101と、送受信部101により放射波が放射された第1の時刻と、反射波が受信された第2の時刻とに基づいて、障害物の存在を少なくとも検出する信号処理部102と、信号処理部の検出結果に基づいて、車両の周囲に障害物が存在することを出力する出力部104とを備える。ここで、出力部104は、車両をスケールダウンした車両モデル105と、車両モデル105において、送受信部101の取り付け位置に相当する箇所に取り付けられており、信号処理部102による検出結果に基づいて発光する発光素子を有する発光部106とを含む。
(もっと読む)
マルチRFIDアンテナによって検出される物品の位置の割り当ておよび推定方法
本発明の好ましい諸実施形態によれば、モニタリングされる一つまたは複数の品物またはオブジェクトの位置を推定するための方法(および対応する装置)が提供される。例示的な実施形態では、該方法(および対応する装置)はRFID(電波方式認識)用途(たとえば、RFIDタグを13.56MHzおよび約900MHzにおいて読み取る)において実装される。それは、複数のRFID読み取り器アンテナによってカバーされる一つまたは複数の検出領域において一意的なRFIDタグに関連付けられた品物の位置を推定することによる。 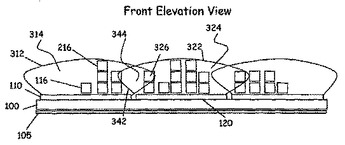 (もっと読む)
(もっと読む)
アプリケーションを感知する無線システム
少なくとも1つのアンテナ(106)を有するトランスポンダ(104)にクエリメッセージを送信する送信機(102)を有する物理的オブジェクトの空間配置を感知する無線システムである。無線周波数シールド(108)は、前記送信機と1つ以上のアンテナとの間に可動に挿置可能であり、これにより、アンテナにおいて受信された前記クエリメッセージの信号強度を減衰させる。前記物理的オブジェクトの空間配置のいかなる状態においても、前記トランスポンダは、前記クエリメッセージを受信することができ、応答として、前記1つ以上のアンテナにおいて受信される前記クエリメッセージの前記信号強度に従って決定されるデータを含む応答メッセージを送信する。 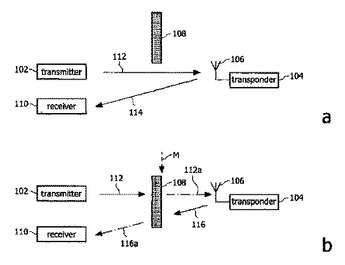 (もっと読む)
(もっと読む)
インパルス無線周波数信号による3次元画像の生成
画像マトリクスの生成は、複数の点を有する空間に関する往復時間マトリクスにアクセスするステップを有する。往復時間マトリクスは、信号が送信アンテナから点へ、更に受信アンテナへ伝わる推定往復時間を表す。空間の対象から反射された信号は、受信アンテナで受信される。以下のステップは、複数の点の少なくとも一部に対して、画像マトリクスを生成するよう繰り返される:複数の点の一部から点を選択するステップ;夫々の受信アンテナに関して、受信アンテナにより受信された信号の波形を定めて、往復時間マトリクスに従って、選択された点に対応する定められた波形の波形値を確認するステップ;及び選択された点に関して画像値を得るよう、選択された点の波形値を結合するステップ。画像マトリクスは、画像値から生成される。  (もっと読む)
(もっと読む)
ICタグのロケーション認識装置および方法
質問器1が、固有ID、Xa、Xb、Xcを読み取った後、IDを指定してプローブ信号発信コマンドを送信する。該当のICタグはそれぞれプローブ信号を順番に発信する。隣接するICタグ2は、質問器が指定したID,Xa、Xb、Xcを隣接IDとしてメモリに保存する。次に質問器1は隣接IDを読み取る。コントローラは、固有ID、Xa,Xb、Xcと隣接ID(Xb),(Xa・Xc)、(Xb)の組み合わせ(Xa−Xb)、(Xb−Xc)を求める。最後に繋ぎ合わせて(Xa−Xb−Xc)を得る。 (もっと読む)
車載レーダ装置およびその信号処理方法
複数のアンテナを切り替えるものにおいては、同時に検知できる範囲は1つであるため、遠距離向けのアンテナの使用時は、近距離の検知範囲が細くなり、逆に近距離向けのアンテナの使用時は、最大検知距離が低下する。また、レーダと画像センサを組み合わせるものでは、画像センサは、悪天候や光線条件(逆光,順光等)によってレーダ単体の場合と同様の検知性能になる場合がある。前方に電波を照射して反射波を受信することにより、少なくともターゲットとの相対速度又はターゲットの位置を検出する第1レーダと、該第1レーダとは検知範囲が異なる第2レーダとを備え、双方とも常時ターゲットの検知を行う。また、上記のようなレーダ装置において、ターゲットが前記第1レーダの検知範囲から外に出たときは、その直前の前記ターゲットの検知情報を前記第1レーダから前記第2レーダに引き渡す。 (もっと読む)
2つ以上のセンサを有する装置
本発明は、信号に対する送信機および受信機を備えた2つ以上のセンサを有しており、そのうち1つのセンサは他のセンサのクロスエコー信号を受信可能である、2つ以上のセンサを有する装置に関する。ここで本発明によれば、各センサが他のセンサの反射信号をそれぞれ別個に分離された状態で相互の障害なく受信および評価できるようにするために、各センサは受信動作において送信信号と受信信号とのあいだの時間遅延により相互に時間的に分離される。 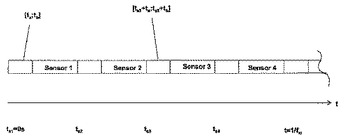 (もっと読む)
(もっと読む)
自動車用の測定装置
測定装置(10…)と少なくとも1つの物体(20)の間の距離を測定するための、および/または、測定装置と少なくとも1つの物体(20)の間の速度差分(v)を測定するための、自動車(1)用の測定装置に関する。測定装置は、信号部分(A(t)…)の2つのシーケンスと、各々が2つの一時的に変化する信号部分(Al…)を有する信号部分(A(t))の第1シーケンスおよび信号部分(B(t))の第2シーケンスとを包括する、送信信号を送信するための放出装置(35、55)を備える。信号部分(A(t)…)のシーケンスの2つの信号部分(A1…)の周波数は、それぞれ1差分周波数だけ異なり、信号部分(A(t))の第1シーケンスの差分周波数は、信号部分(B(t))の第2シーケンスの差分周波数と異なる。 (もっと読む)
線形サブアンテナによって構成される十字アンテナおよび一連の処理
本発明は、線形サブアンテナを含む十字アンテナ及びその一連の処理に関するものである。特に、本発明は、第1及び第2線形部を形成し、基本信号(Si´,Gj´)を生成するセンサ(21−2M,31−3N)を備え、第1及び第2線形部のそれぞれの中間点に接する、第1及び第2のそれぞれの接線方向ベクトル間の角度が、30°から150°の間の角度である第1(2)及び第2(3)線形サブアンテナと、結合信号(VSi,VGj)を形成するアンテナ処理装置(4,5)と、有用な結合信号(TSi,TGj)を生成する信号処理装置(6,7)と、有用な結合信号間の相関係数([Cij])を算出する装置(8)と、相関係数が閾値を超える場合に、検出信号([Rij])を生成する装置(8)とを有するアンテナ(1)に関するものである。本発明は、例えば、同等の性能レベルのためのいくつかのセンサを有するアンテナを得るために用いることができる。 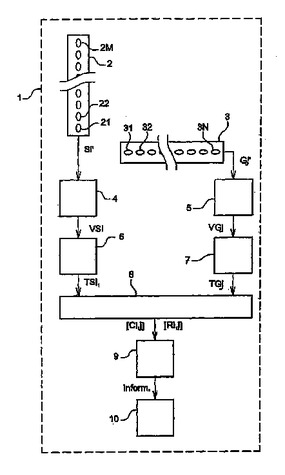 (もっと読む)
(もっと読む)
レンジ、レーダ感度、及び角度精度の強化のための複数レーダ結合
複数のレーダの信号を合成して、レンジ、レーダ感度、及び角度精度の強化を達成するためのメカニズムが提供される。第1信号ビームは、第1レーダのアンテナから目標物の方向に放射される。第2信号ビームは、第2レーダのアンテナから同じ目標物の方向に放射される。第1信号ビーム及び第2信号ビームからのエコー信号は、両方のレーダにおいて受信される。第1レーダにおいて受信したエコー信号は処理されて、第1レーダ処理済みエコー信号が生成され、第2レーダにおいて受信したエコー信号は処理されて、第2レーダ処理済みエコー信号が生成される。第1及び第2レーダ処理済みエコー信号は、集約値を形成するために合成される。 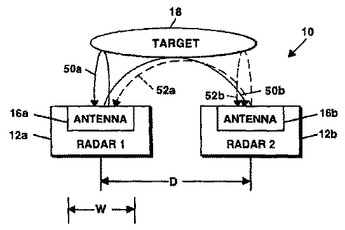 (もっと読む)
(もっと読む)
車両の周囲にある障害物の輪郭を検出するための方法およびコンピュータプログラム
【課題】本発明は、好ましくは車両の側方領域に組み込まれているセンサ手段(110)によって、走行する車両(200)の周囲にある障害物(300)の輪郭を検出する方法に関する。
【解決手段】発生された反射信号をまず数学的に平均化して、かくて得られた平均化された反射信号から、障害物の実際の位置および障害物の輪郭の実際の形状をより正確に導き出すことができる。 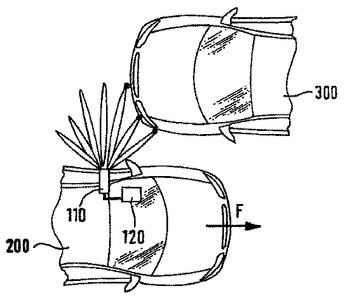 (もっと読む)
(もっと読む)
物体の検出方法、障害物検出方法及び障害物検出装置
【課題】より短時間で一定範囲内の物体を検出できるようにすることである。
【解決手段】筐体21を所定角度範囲回転させて、遠距離用アンテナ11a、中距離用アンテナ11b、短距離用アンテナ11cから同時に電波を放射し、それぞれの反射波を受信して一定範囲内の物体を検出する(図3,S11)。処理装置13は、遠距離用アンテナ11a、中距離用アンテナ11b、短距離用アンテナ11cの反射波から得られるそれぞれの検出データをマージして一定範囲内にある物体の検出データを得る(S13)。さらに、その検出データから障害物を抽出する(S14)。
(もっと読む)
441 - 454 / 454
[ Back to top ]