
Fターム[5J070AD05]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナのいずれかが複数 (1,035) | 送信・受信アンテナが何れも複数 (454)
Fターム[5J070AD05]に分類される特許
61 - 80 / 454
車両ドライバ支援装置およびレーダ装置操作方法
携帯機検知システム
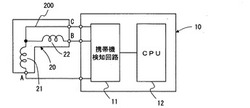
【課題】比較的簡素な構成で、応答性よく携帯機の位置を検知することができる携帯機検知システムを提供する。
【解決手段】車両の進行方向を長手方向とする第1エレメント21と、車両の進行方向及び鉛直方向に垂直な方向を長手方向とし、第1エレメントに電気的に直列接続された第2エレメント22と、第1エレメント21と第2エレメント22の接続点に一端が接続された迂回配線200とを含むアンテナ20と、第1エレメント21に電力を供給する第1電力供給状態、第2エレメント22に電力を供給する第2電力供給状態、第1エレメント21及び第2エレメント22に電力を供給する第3電力供給状態の、3つの電力供給状態を切り換えると共に、電力供給状態を切り換えた際の携帯機からの応答信号に基づいて携帯機の位置を検知する携帯機検知手段(携帯機検知回路11、CPU12)を備える。
(もっと読む)
目標追尾装置、目標追尾方法、及びプログラム

【課題】センサを有効活用して多くの目標を追尾可能とする。
【解決手段】目標追尾手段10は、センサ装置61、62の観測値から、目標の探知や、目標の状態を推定する。センサ状態管理手段20は、センサ装置61、62の状態を管理する。目標軌道予測手段30は、目標の状態から、目標の将来位置を予測する。センサ割当・方位変更計算手段40は、センサの状態と目標の将来位置とから、ネットワークの経路探索を行うことにより、センサ割当スケジュールと方位変更スケジュールとを算出する。センサ制御装置50は、センサの状態、目標の将来位置、センサ割当スケジュール、及びセンサ方位変更スケジュールから、目標追尾と方位変更とを指示する。センサ装置61、62は、センサ制御装置50からの指示に従って、目標追尾と方位変更とを実行する。
(もっと読む)
測位装置
【課題】測位エリア内の無線タグの数の増加に伴う測位精度の低下を抑制すること。
【解決手段】測位装置100は、タグ測位部102と、カメラ測位部105と、タグ測位部102の測位結果とカメラ測位部105の測位結果を統合するフュージョン部103と、測位エリアAR0内の無線タグの数が所定数以上になった場合に一部の無線タグとの通信を抑制するタグ抑制部108と、を有する。タグ抑制部108は、カメラ測位部105による測位が可能な位置に存在する無線タグとの通信を抑制する。
(もっと読む)
位置推定装置およびプログラム
【課題】無線信号を送信する送信装置の位置を高精度で推定することのできる位置推定装置およびプログラムを得る。
【解決手段】入館管理装置20により、RFIDタグ52の位置を送信された無線信号に基づいて推定し、かつ当該推定対象とする領域を撮影するカメラ40によって得られた画像情報に基づいて前記領域に存在する人の位置を導出し、少なくとも推定したRFIDタグ52の位置を入力情報とし、補正後のRFIDタグ52の位置を示す物理量を出力情報とし、当該出力情報の正解情報を用いた学習機能を有するニューラル・ネットワークにより得られた物理量を用いて、推定したRFIDタグ52の位置を補正する一方、位置の推定対象としたRFIDタグ52の所持者が、位置の導出対象とした人とみなされる予め定められた条件を満足した場合に、導出した前記人の位置を示す物理量を前記正解情報としてニューラル・ネットワークを学習させる。
(もっと読む)
鳥獣追跡システム
【課題】電力消費を最小限に抑えつつ、鳥獣の生息環境の即時的な把握が可能な鳥獣追跡システムを提供する。
【解決手段】鳥獣追跡システムは、鳥獣2に装着可能な鳥獣タグ3と、複数の基地局1a,1bと、データセンタ6とを備える。鳥獣タグと基地局とは、夫々の時刻取得装置に基づきビーコンの周期的な送受信の同期を取る。鳥獣タグは、いずれの基地局とも通信圏外にあるときは無線機によるビーコン受信を停止し、動き感知センサが鳥獣の静止状態を検知したときは、GPSセンサによるデータ取得周期を延長させる。また、データ取得時のみ、最小時間、GPSセンサを起動させる。なお、鳥獣タグが通信圏外にあり、かつ、鳥獣タグメモリが満杯であるときは、保存された位置データを時間均等に間引くとともに、GPSセンサによるデータ取得周期も間引間隔に併せて延長させることが好ましい。
(もっと読む)
捜索レーダ装置および捜索レーダ装置における不要波成分抑圧方法
【課題】サイドローブの影響により発生するゴーストのレベルを抑圧し、所望信号レベルを相対的に向上させ確実に所望の目的検出を可能にした捜索レーダ装置を得る。
【解決手段】時分割で送信した複数の送信ビームに対し各送信ビーム毎に複数の各送信ビームと少なくとも同じ方向に関し同時に形成される複数の受信ビームに現れるアレーアンテナで受信した送信ビームの目標でのエコーから受信信号を抽出するレーダであり、各ビームスポット毎に、それぞれ複数の送信ビームのうちの所定数の連続する送信ビームからなる複数の送信ビーム群に対して受信ビームから抽出して得られる受信信号を時間軸上に並べた合成受信信号を生成する手段、合成受信信号とアレーアンテナのアンテナパターンを前記送信ビームの送信パルス幅及びビームスポット間隔に従い離散的に示す予め求めたパターン関数との相関処理を行い不要波成分を抑圧した受信信号を生成する手段を含む。
(もっと読む)
レーダーシステム及びその製造方法
送信アセンブリ(10)、受信アセンブリ(20)、制御部(30)及び信号処理部(40)を含むレーダーシステム(100)について述べる。送信アセンブリ(10)は、入力信号(31)を受信し、入射レーダー信号(2)を送信する。送信アセンブリ(10)は、レンズキャビティ(74)、複数のビームポート(60)、複数のアレイポート(62)及びパッチアンテナアセンブリ(14)を有するRotmanレンズ(12)を含む。レンズキャビティ(74)は、10ミクロン〜120ミクロン、好ましくは40ミクロン〜60ミクロンのレンズギャップ(h)を有する。パッチアンテナアセンブリ(14)は、Rotmanレンズ(12)から複数の時間遅延同相信号を受信し、入射レーダー信号(2)をターゲット(4)に向けて送信するように動作可能な複数のアンテナアレイ(130)を含む。受信アセンブリ(20)は、反射レーダー信号(6)を受け取り、出力信号を生成する。信号処理部(40)は、入力信号(31)を出力信号と比較し、ターゲット(4)のレンジ、速度及び位置を決定するアルゴリズムを実施する。 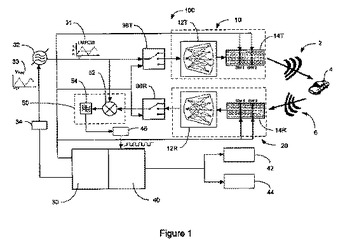 (もっと読む)
(もっと読む)
送受信ビーム形成装置
【課題】目標波電力が低い場合にも精度良くビーム形成することができる送受信ビーム形成装置を得る。
【解決手段】送受信ビーム形成装置は、分配器の出力にそれぞれ送信ビーム荷重を乗算する送信用乗算器と、受信器の出力に受信ビーム形成荷重を乗じる受信用乗算器と、受信用乗算器の出力を合成する合成手段と、合成手段の出力のSNRが最大化するような受信ビーム形成荷重を算出するとともに算出した受信ビーム形成荷重で受信用乗算器を制御する受信荷重制御手段と、受信荷重制御手段で算出された受信ビーム形成荷重を送信ビーム形成荷重とするとともに送信ビーム形成荷重で送信用乗算器を制御する送信荷重制御手段と、を備えた。
(もっと読む)
レーダ装置
【課題】測角精度を向上できるレーダ装置を提供する。
【解決手段】複数の素子を有し、複数の素子が順番に複数の第1素子12aと第2素子11aと第3素子11a´と複数の第4素子12a´とに分割されたアンテナ10と、観測角度範囲全体を第2素子と第3素子とで覆うビームを形成し、所定角度を中心とする所定範囲を複数の第1素子と複数の第4素子とで覆うビームを形成し、複数の素子全体で所定角度を中心とする所定範囲内の任意の方向にビームを形成するビーム成形部34と、ビーム成形部で形成されたビームに基づきモノパルス測角を行う測角部37とを備える。
(もっと読む)
電波到来方向推定装置および電波到来方向推定方法
【課題】電波到来方向を推定するための受信回路の構成を簡略にした、電波到来方向推定装置および電波到来方向推定方法を提供する
【解決手段】複数のアンテナ11は相対的な位置を固定して配置される。受信機1は、複数のアンテナの数より少ない数であって、所定の電波を受信する。時分割スイッチ14は、受信機1に同時には1つのアンテナ11が接続するように、受信機1とアンテナ11との接続を所定の周期で切り替える。直並列変換器4は、受信機1とアンテナ11との接続を所定の周期で切り替えて受信機1で受信した信号を、複数のアンテナ11のそれぞれで受信した信号に分配する。到来方向算出部5は、複数のアンテナ11のそれぞれで受信した信号に分配した信号から、受信した電波の到来方向を算出する。
(もっと読む)
セルラー式移動無線測位システム
【課題】移動端末の1次元〜3次元の何れかの次元の位置を高精度で測位する装置を安価に実現する。
【解決手段】移動端末103から起点信号を含む無線信号をバースト信号として間欠発信し、セル毎もしくはセクタ毎に配置された複数の無線マーカ101a、101bからは、再生した起点信号と高精度に同期を確立した距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、複数の指向性アンテナ21aa〜21bdを周期的に切替えながら時分割で発信し、前記移動端末103において、前記距離測定信号の位相を測定して複数の無線マーカ101a、101bからの距離を算出し、前記複数のアンテナ21aa〜21bdに対応した方向測定信号の位相差を測定して複数の無線マーカ101a、101bが位置する方向を算出することによって、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
(もっと読む)
位置推定装置及び位置推定方法
【課題】ビームアンテナを利用した位置推定において、高精度に位置推定を行なうことを課題とする。
【解決手段】位置推定装置は、指向性アンテナから出力されるビームの方向を制御し、制御された方向での指向性アンテナから出力されるビームを第1周波数で出力する。また、位置推定装置は、出力されるビームを第1周波数で出力した後に、第1周波数とは異なる第2周波数で出力する。また、位置推定装置は、第1周波数のビームの出力が到達した無線タグを有する端末装置から当該無線タグのIDを取得する。また、位置推定装置は、第2周波数のビームの出力が到達した無線タグを有する端末装置から当該無線タグのIDを取得する。また、位置推定装置は、第1周波数及び第2周波数のビームで共通に取得されたIDを特定し、特定されたIDとビームの方向とを出力する。
(もっと読む)
距離測定装置
【課題】相対距離を高精度で測定するための距離測定装置を安価に実現する。
【解決手段】質問器101から第1の距離測定信号を含む無線信号を発信し、トランスポンダ102の第1のアンテナ25aによって前記無線信号を受信して第1の距離測定信号を再生し、周波数を分周して第2の測定信号を生成し、前記無線信号を前記第2のアンテナ25bによって反射させあるいは吸収させてASK変調した無線信号を再発信し、前記質問器101によって受信して前記第2の測定信号を再生し、前記第1の測定信号を基準として再生した第2の測定信号の位相を測定することによって、質問器101とトランスポンダ102との間の距離を高精度で測定する。
(もっと読む)
測定装置
【課題】測定すべき測定情報を推定するときに、測定情報に生じる誤差に関する情報を使用者に提供可能な測定装置を提供する。
【解決手段】観測手段12によって受信した電波信号に基づいて、測定すべき測定情報、たとえば電波信号の到来方位、発信源までの距離または発信源の位置を推定手段13によって推定し、表示手段14によって表示する。このとき、推定手段13によって推定された物理量に含まれる誤差を表す誤差情報を最大誤差評価手段11によって求め、表示手段14によって表示する。最大誤差評価手段11は、たとえば、推定手段13による物理量の推定に用いた推定モデルからの実際の観測量の誤差であるモデル誤差によって推定量に生じる推定誤差の最大値を求め、表示手段14によって表示させる。
(もっと読む)
相関受信処理装置
【課題】空間中に複数種類の信号が伝搬されている場合であっても、所望信号及びその他の信号のサイドローブを抑圧することが可能な相関受信処理装置を提供する。
【解決手段】抑圧ウェイト算出部2233は、信号SBを零に抑圧するための抑圧ウェイト行列WBと、信号SCを零に抑圧するための抑圧ウェイト行列WCとを算出する。不要信号抑圧部2232は、FFT後の信号に対して、抑圧ウェイト行列WB,WCを掛け合わせ、入力信号行列Xにおける信号SB,SCを抑圧する。また、サイドローブフリー係数算出部2234は、抑圧ウェイト行列WB,WCが掛け合わされた入力信号行列Xの状態を考慮し、信号SAのサイドローブを抑圧するための自己相関のサイドローブフリー係数行列を算出する。そして、サイドローブ抑圧部2236は、不要信号抑圧部2232からの信号に、サイドローブフリー係数行列を掛け合わせることで、信号SAのサイドローブを抑圧する。
(もっと読む)
移動体管理装置
【課題】タグを有しない移動体を的確に判定することのできる移動体管理装置を得る。
【解決手段】ID付き移動体動線作成部2は、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の動線をID付き移動体動線として作成する。移動体動線作成部4は、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の動線を移動体動線として作成する。動線比較部5は、ID付き移動体動線と移動体動線とを比較し、動線が近いものを対応付ける。判定部6は、動線比較部5において、対応付けがなされない動線の移動体をタグを有しない移動体として判定する。
(もっと読む)
ドップラーセンサー
【課題】 誤判定が抑えられるドップラーセンサーを提供する。
【解決手段】 取付面FSに対して固定される基板1と、弾性材料からなる制振体2を介して基板1に対して固定され電波を反射する反射体3とを備える。基板1には、それぞれ送信アンテナ11a,11bにより互いに同じ向きの検出立体角SR1,SR2へ電波を送信するとともに検出立体角SR1,SR2からの電波を受信し検出立体角SR1,SR2内に存在する物体と基板1との間の距離の変化速度に応じた周波数のドップラー信号を生成する2個の送受信回路が実装されており、一方の検出立体角SR2は反射体3に覆われている。他方の検出立体角SR1内に移動物体(人体)が存在するか否かが、上記2個の送受信回路が出力したドップラー信号間の差分信号に基いて判定される。
(もっと読む)
電子キーシステムのキー位置判定装置
【課題】電子キーの位置をより精度よく検出することができる電子キーシステムのキー位置判定装置を提供する。
【解決手段】車両の運転席アンテナ及び助手席アンテナから交互に電波を送信して、これら電波を電子キーが受信したときの磁界強度Hd,Hpと電波到来方向Kd,Kpとを算出する。そして、磁界強度Hd,Hpの大小を比較して、電子キーの車外位置を判定する。このとき、磁界強度Hd,Hpのうち高い側が磁界強度範囲Eaに位置して、単なる大小判定ではキー位置を判定できない場合、電波到来方向Kd,Kpの電波角度差θxからキー位置を判定する。電波角度差θxが重複範囲Ebに位置してキー位置を判定できない場合、電波角度差θx及び2つの磁界強度Hd,Hpを繋いだ三角線25を算出し、この三角線25が成す角度θrにより、キー位置を最終判断する。
(もっと読む)
レーダ装置
【課題】受信信号における偏波チャネル間のコヒーレンスが低下した場合であっても、低い演算負荷で高精度に目標を検出することができるレーダ装置を得る。
【解決手段】異なる偏波特性を有する2つのアンテナ4、5と、パルス信号をアンテナ4、5の一方に複数回連続して出力した後、他方に複数回連続して出力する偏波切り換え器2と、受信信号のドップラースペクトルを算出するドップラー処理手段10と、平均電力レンジ・ドップラーマップを生成する平均電力算出手段11と、平均全電力レンジ・ドップラーマップを生成する平均全電力算出手段12と、各注目セルの電力値を参照セルの平均電力で正規化するCFAR手段13と、電力値が閾値を超えるセルを検出する閾値処理手段14と、検出されたセルについての電力比を算出する電力比算出手段15と、電力比に基づいて、クラッタと目標との判別処理を実行する判別処理手段16とを備える。
(もっと読む)
61 - 80 / 454
[ Back to top ]