
Fターム[5J070AD06]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナのいずれかが複数 (1,035) | 受信アンテナのみが複数 (476)
Fターム[5J070AD06]の下位に属するFターム
モノパルスアンテナ (180)
Fターム[5J070AD06]に分類される特許
281 - 296 / 296
近距離目標物体の距離及び角度特定用の多目標対応型方法及び多目標対応型センサー機器
本発明は、近距離目標物体の距離及び角度特定用の多目標対応型方法に関し、本方法は以下のステップを含む。すなわち、a)第一のセンサー要素(10)の送信アンテナ(11)により特性信号が送信され、b)反射された特性信号が第一のセンサー要素(10)の少なくとも2個の隣接する受信アンテナ(1、2)において受信され、c)目標物体と第一のセンサー要素(10)の間の距離を特定するため、第一のセンサー要素(10)の2個の隣接する受信アンテナ(1、2)への反射された特性信号の伝播時間の差が測定され、d)目標物体と第一のセンサー要素(10)との角度を特定するため、第一のセンサー要素(10)の2個の隣接する受信アンテナ(1、2)の間での特性信号の位相差が測定される。本発明は、上述の方法を実施する機器にも関する。  (もっと読む)
(もっと読む)
自動駐車システム
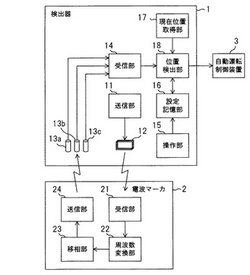
【課題】 自動駐車のための設定を駐車場以外の場所で、駐車場の環境に依存せずに設定可能であり、かつ、車両が駐車場に近付いた時点で自動駐車モードに入れる利便性の高い自動誘導システムを提供すること。
【解決手段】 電波マーカ2は、駐車スペースおよびその周辺に複数設置され、それぞれ位置情報を有する。検出器1は電波マーカ2と無線通信が可能であり、現在位置を取得する現在位置取得部17と、駐車スペースの寸法や複数の電波マーカ2の配置位置を示す配置情報を記憶する設定記憶部16と、受信アンテナ13a、13b、13cで受信した信号の信号レベルに基づいて電波マーカまでの距離を検出して電波マーカの位置を取得し、複数の電波マーカ2の位置を取得することにより配置情報を参照して現在位置と複数の電波マーカ2の配置との位置関係を特定する位置検出部18とを備える。自動運転制御装置3は特定された位置関係に基づいて車両の自動駐車を行う。
(もっと読む)
無線タグ探索装置

【課題】 発光素子を備えていない無線タグの読取エリア内の位置を迅速に探し出せるようにする。
【解決手段】 操作パネル2と、表示器3と、送信アンテナ4と、無指向性受信アンテナ5と、左指向性受信アンテナ6Lと、右指向性受信アンテナ6Rとを備えた携帯型の装置である。無指向性受信アンテナ5が無線タグ4からの応答電波を検出したことに基づいて左指向性受信アンテナ6L及び右指向性受信アンテナ6Rの受信信号のレベルを検出し、それらのレベル差に基づいて、無線タグからの応答電波の到来方向を判定し、表示器3に矢印A1〜A3により「左」、「中央」、「右」を表示する。
(もっと読む)
物体から反射された電磁的な信号を検出する方法および装置
【課題】明瞭さおよび信号の集束に関して受信アンテナによる検出を改善すること。
【解決手段】方法に関しては、間隔(d)を、明瞭領域の境界がサイドローブを通るように、選択すること、および反射する物体を、受信アンテナ(3,4)の信号のベクトル和によって検出することを特徴とする。装置に関しては、明瞭領域の境界がサイドローブを通るときの間隔(d)と、受信信号(3,4)によって受信された信号のベクトル和を形成する手段とを特徴とする。
(もっと読む)
車載用電波式レーダ装置及びその製造方法
【課題】外筐体に設けられる外部接続コネクタと内部回路とを接続する伝送線を磁気シールドしつつ、外部接続コネクタを内部回路の位置に規制されることなく、自由に設置できるようにする。
【解決手段】外筐体60は、外筐体本体61と、その内周面に施されているシールド層62とを有して構成されている。内部回路からの伝送線73は、外筐体60のシールド層62の外周側を、このシールド層62に沿って所望の位置迄伸び、そこに外部接続コネクタ70が設けられている。
(もっと読む)
レーダ装置
【課題】 位相モノパルス方式でターゲットの方位を決定するFM−CWレーダ装置において、マルチターゲットによる異常値を検出する。
【解決手段】 3本の受信アンテナを5λ/4および6λ/4の間隔で配置し、間隔5λ/4の受信アンテナの組み合わせから得られる方位と間隔6λ/4の受信アンテナの組み合わせから得られる方位との差が所定値未満であるかを判定し(ステップ1000)、それがn回連続するとき正常と判定する(ステップ1004)。n回連続していない時または方位の差が所定値以上であるときマルチターゲットによる異常値と判定する(ステップ1006)。
(もっと読む)
レーダ装置
【課題】 MUSIC法やEsprit法などによって到来波数の推定を行うレーダ装置において、精度良く到来波数の推定が行えるようにする。
【解決手段】 到来波数推定処理の際に、信号処理部8に記憶しておいたビート周波数ごとのスレッショルドλTH1〜λTH256に基づいて雑音を考慮したスレッショルドλTHを設定し、このスレッショルドλTHに基づいて到来波の固有値λが信号空間の固有値λ1〜λLか雑音空間の固有値λL+1〜λKかを分別する。これにより、雑音を考慮に入れた上で、信号空間の固有値の数から到来波の数を正確に推定することができる。
(もっと読む)
レーダ装置、及び該レーダ装置を備えた車両制御装置
【課題】 アンテナに付着する異物の存在を容易かつ正確に判定するレーダ装置、及び該レーダ装置を備えて適切な車両制御を実行する車両制御装置を提供する。
【解決手段】 送信IC2を用いて送信アンテナ1から送信波を送信すると共に、物体により反射された送信波の反射波を受信アンテナ3a〜3i及び受信IC4a〜4iにより受信し、信号処理部5で物体までの距離または方位を検出するレーダ装置において、受信アンテナ3a〜3iが、それぞれ略同一の受信特性及び略同一方向の指向性を有すると共に所定の間隔で並べられた受信アンテナを備えたアレイアンテナである時に、受信信号レベル検出手段により複数の受信アンテナで受信された受信信号レベルを検出し、異物付着判定手段により、複数の受信アンテナ間の受信信号レベルのばらつき、あるいはレベル差が所定値以上の場合には、受信アンテナ3a〜3iの前面に異物が付着していると判定する。
(もっと読む)
車両周辺監視装置
【課題】 車両周辺の監視を廉価に行うと共に、車両周辺監視の要処理時間を短くすることができること。
【解決手段】 車両1の異なる箇所に搭載した複数台の受信器A0〜D0と、その受信器A0〜D0が受信する電磁波を出力する送信器Eとを配設し、車両1付近に検出対象が存在しない状態で、送信器Eが出力した電磁波を車両1に搭載した受信器A0〜D0で受信し、その受信電界のパターンを記憶回路に記憶させ、送信器Eが出力した電磁波を車両1に搭載した複数台の受信器A0〜D0で受信し、その受信電界のパターンを記憶回路に記憶しているパターンと比較して、車両1の周辺状態を検出する。
(もっと読む)
レーダ装置
【課題】短時間で目標上の電波反射点の空間位置を算出し、目標の3次元形状を算出できるレーダ装置を得ることを目的とするものである。
【解決手段】目標による反射電波を互いに異なる位置にある2つの受信手段からなる一組の受信手段で受信し、目標上の電波反射点に対応するレンジ及びドップラー周波数からなる電波反射点情報を算出する。算出された電波反射点情報をそれぞれに対応する目標上の電波反射点が一致する一組の電波反射点情報として対応付けを行い、一組の電波反射点情報並びに目標と一組の受信手段との相対位置及び相対運動から目標上の電波反射点の空間位置を算出するようにしたものである。
(もっと読む)
レーダ装置
送信信号を放射するアンテナと、物体から反射された送信信号を受信する複数のアンテナの各出力端子を入力端子に第1の周期で択一的に順次切替接続する第1の切替スイッチ部と、各アンテナからの受信信号を前記送信信号の一部を用いてダウンコンバートする第1のダウンコンバート部と、第1のダウンコンバート部の出力に接続された低域カットフィルタと、該フィルタの出力を複数
のA/D変換器に択一的に順次切替接続する第2の切替スイッチ部と、複数のA/D変換器からの出力を入力し所定の処理を施して前記物体までの距離又は前記物体との相対速度を検出するディジタル信号処理部とを有し、第1の切替スイッチはアンテナと接続中に第1の周期より短い第2の周期でON−OFF制御を行う、DBF型のレーダ装置。
(もっと読む)
レーダセンサ
パルスエコー方式によるレーダセンサにおいて、広いアンテナ特性をもつ第1の受信アンテナ(6)と、狭いアンテナ特性をもつ第2の受信アンテナ(17)が設けられている。さらに受信経路中に、2つの受信アンテナの受信信号を送信レーダパルスのパルス繰り返し周波数のタイミングで切り替える切替手段(18)が設けられている。 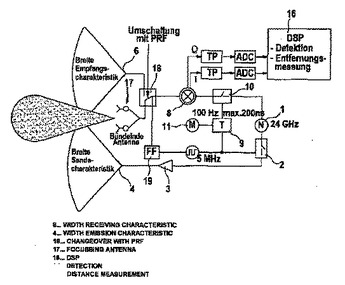 (もっと読む)
(もっと読む)
位置情報の決定
物体(102)に関する位置情報を決定するための機器(200)であって、複数の受信エレメント(212、214、216、218)を含む、受信するための手段(210)と、受信エレメント(212、214、216、218)で受信された信号(106)を検出し、受信信号を表す出力信号を生成するための検出手段(230)と、各受信エレメント(210)ごとに、他の任意の受信エレメント(212、214、216、218)で受信される信号から生成される任意の出力信号とは別に、その受信エレメント(210)で受信される信号から生成される出力信号にプロセスを適用し、その結果、その受信エレメントで受信される信号(106)を表すパラメータのそれぞれの値を得るように動作可能な処理手段(260)とを含み、処理手段(260)はさらに、こうして得られたパラメータの値を比較し、その結果、物体に関する位置情報を取得するように動作可能な機器(200)。  (もっと読む)
(もっと読む)
干渉レーダ高度計におけるアンテナ方向を較正するための方法及びその装置
レーダ高度計(10)を較正するための装置(100)が、記述される。高度計は、右(20)、左(16)及び中間アンテナ(18)で受信したレーダ・エネルギーに基づいて目標に対する角度を求める。装置は、レーダが装着されるターン・テーブル(104)と、レーダ高度計の位置を制御するターン・テーブル制御部(106)と、レーダ高度計から送信信号(110)を受け取るレーダ・エネルギー源と、反射体(122)と、較正装置(128)と、を備える。反射体は、レーダ・エネルギー(124)をレーダ源からレーダ高度計に向けて反射し、平行化する。較正装置は、平行化されたレーダ・エネルギーに対するレーダ高度計の位置を示す角度(108)を制御部から受け取り、測定角度(126)をレーダ高度計から受け取る。較正装置は、ターン・テーブルから受け取った角度と高度計から受け取った測定角度との差に基づいて修正係数(72)を計算し、高度計に、較正修正係数を提供する。 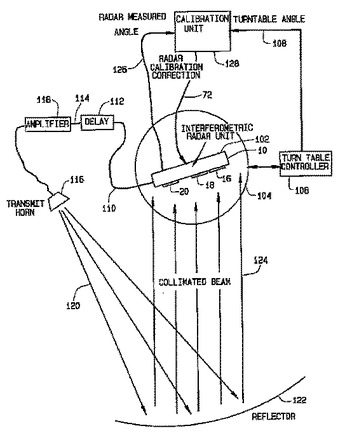 (もっと読む)
(もっと読む)
信号強度による位置探索システムの自己補正方法
データ通信システム内のモバイルユニットの位置をモバイルユニットの送信信号強度に基づいて決定するシステムを、アクセスポイントからモバイルユニットまでの距離を往復時間距離を用いて決定することによって、モバイルユニットトランスミッタ電力の変化に対して較正する。時間距離を信号強度に基づく距離の値と比較し、モバイルユニットに対する補正値を時間距離と信号強度に基づく距離との差に基づいて更新する。 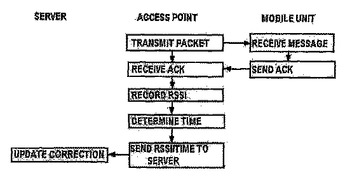 (もっと読む)
(もっと読む)
サイドローブキャンセラ
【課題】補助アンテナが目標信号と周波数が重なるクラッタを受信しても、主アンテナの受信信号に含まれている信号成分のうち、不要信号の成分だけを抑圧することができるサイドローブキャンセラを得ることを目的とする。
【解決手段】減算器8の差分信号e(t)を参照して目標信号の周波数fsを推定し、その周波数fsを含む周波数帯域を帯域フィルタ4,5の通過帯域に設定するように構成した。これにより、補助アンテナ2が目標信号と周波数が重なるクラッタを受信しても、主アンテナ1の受信信号に含まれている信号成分のうち、不要信号の成分だけを抑圧することができる。
(もっと読む)
281 - 296 / 296
[ Back to top ]