
Fターム[5J070AE01]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 自動車 (1,037)
Fターム[5J070AE01]に分類される特許
21 - 40 / 1,037
目標物管理装置および目標物管理方法
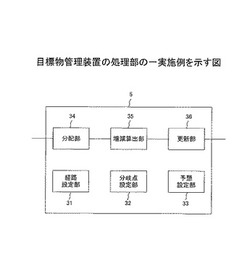
【課題】目標物の誤検出を抑止するとともに、センサの数を抑えて目標物の数を効率よく管理する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲に対応する地図情報の2つ以上の座標により表される複数の経路と、経路が接続する点を表す分岐点とを関連付け、センサ各々が探知した1つ以上の目標物の座標を、複数の経路のいずれかに関連付ける分配部と、1回目の走査時に探知した分岐点に関連付けられている経路各々の目標物の数と、2回目の走査時に探知した経路各々の目標物の数とを用いて、経路各々の目標物の数の増減値を算出し、経路各々の目標物の数の増減値から分岐点ごとに、経路各々に関連付けられている目標物の数の増加数または減少数を求める増減算出部と、増加数または減少数を、前回更新部で求めた経路の目標物の数に加えて今回の該経路の目標物の数とする更新部と、を備える目標物管理装置である。
(もっと読む)
車両周辺監視装置

【課題】車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供する。
【解決手段】レーダ装置2よりレーダ電波の走査を行なう車両周辺の監視領域を車載カメラ3により撮像し、撮像画像の色情報又は輝度情報に基づいて、監視領域におけるレーダ電波の反射率の分布を反射率推定手段5により推定する。レーダ電波の反射波に受信強度に対する閾値(監視領域の各局所に対応する閾値)を、受信強度閾値設定手段6により、推定した反射率の分布に応じて設定する。対象物認識手段7は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
(もっと読む)
探知測距装置および探知測距方法
【課題】センサアレーを用いて到来方向推定を行い、さらに複数の送信センサを用いて実効開口を拡大する探知測距装置において、スイッチの切り替えによる時分割処理の弊害をなくし、高精度の測定を可能とする。
【解決手段】変調器161,162において互いに直交する符号を用いて送信波を拡散し、送信用センサAT1,AT2から放射する。受信用センサAR1〜ARNで受信された信号のそれぞれを分岐器241,242で2分岐し、そのそれぞれについて復調器2611〜262Nにおいて送信側で用いた符号と同じ符号により逆拡散する。
(もっと読む)
後側方障害物検知装置
【課題】自車両がガードレール等の非報知対象物と近い位置にある場合であっても、報知対象物である他車両等が非報知対象物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物として検知する検知角度の範囲である非報知対象物検知範囲の大きさを制御する非報知対象物検知範囲制御部と、自車両から非報知対象物までの距離を算出する距離算出部とを備え、非報知対象物検知範囲制御部は、距離算出部によって算出された自車両から非報知対象物までの距離に応じて、非報知対象物検知範囲の大きさを制御する。
(もっと読む)
障害物検知装置及びコンピュータプログラム
【課題】障害物検知装置1101において、障害物の誤検知を抑制する。
【解決手段】電波を送信する送信アンテナ1001と、前記送信された電波が障害物により反射された電波を受信する受信アンテナ1002と、前記受信された電波に基づいて障害物を検知する障害物検知部311と、前記検知された障害物について、あらかじめ設定された誤検知の特徴の有無を判定する誤検知判定部1011と、画像を撮像するカメラ302と、前記誤検知の特徴があることが判定された障害物について、前記カメラ302により撮像された画像に基づいて、当該障害物の有無を判定する障害物有無判定部1012と、を備える。
(もっと読む)
後側方障害物検知装置
【課題】自車両が低速で走行する場合であっても、非報知対象物であるガードレール等の静止物が、報知対象物である他車両等の移動物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物と報知対象物に分類する対象物分類部と、自車両の走行速度に応じて、対象物を非報知対象物に分類する条件を制御する非報知対象物分類条件制御部とを備える。
(もっと読む)
信号生成回路、レーダー装置
【課題】低雑音で高周波数精度かつ高線形なFMCW信号を得ることのできる信号生成回路、レーダー装置を提供する。
【解決手段】アナログ制御信号により発振信号の周波数が制御される発振器を有している信号生成回路は、発振信号の位相情報を検出してディジタルの位相情報を出力するディジタル位相検出部と、ディジタルの位相情報を微分してディジタルの周波数情報を出力する第1の微分部と、発振周波数を設定する周波数設定コードとディジタルの周波数情報とを比較してディジタルの周波数誤差情報を出力する比較部と、ディジタルの周波数誤差情報の高周波成分を除去するローパスフィルタ部とを備えている。さらに、高周波成分が除去されたディジタルの周波数誤差情報をアナログの周波数誤差情報に変換するD/A変換部と、アナログの周波数誤差情報を積分してアナログの位相誤差情報に変換しアナログ制御信号として出力する積分器とを備えている。
(もっと読む)
レーダ画像処理装置及びレーダ画像処理方法
【課題】何らかの原因で強度画像や距離画像内の画素値が異常値になっている場合でも、目標物を検出することができるレーダ画像処理装置及びレーダ画像処理方法を得ることを目的とする。
【解決手段】目標領域検出処理部12が、目標候補画素設定処理部11により設定された目標候補画素と特定物が不明な画素(目標物、背景領域及びクラッタ領域のいずれも構成していない画素)とから構成される和集合の領域の空間的な大きさが、予め設定されている目標物の空間的な大きさと近似しているか否かを判定する。
(もっと読む)
物体識別装置、および物体識別プログラム
【課題】車両の周囲に存在する物体の種別を識別する物体識別装置において、物体を正確に識別できるようにする。
【解決手段】衝突防止システムにおいては、自車両の周囲に音波または電磁波を照射して該音波または電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物体までの距離の情報を含む物体情報を取得し(S110)、物体の高さの情報を取得する(S130)。そして、物体の高さおよび物体までの距離に応じて反射強度を補正し(S140)、補正後の反射強度に応じて物体の種別を識別する(S170〜S280)。よって、反射強度を正常に検出することを妨害する要素を除外するように反射強度を補正することができ、正確に反射強度を検出できるようにすることで、物体を正確に識別することができる。
(もっと読む)
移動物体検出装置
【課題】複数の移動体を単一の移動物体であると誤認識してしまう状況の発生を抑制
【解決手段】移動物体検出装置1は、レーダ波を前方に向けて送信し、送信したレーダ波の反射波を観測した結果に基づいて、レーダ波を反射した反射点の位置である反射点位置を連続して検出する。検出された2つの反射点位置のうち、移動物体検出装置1から遠い方の反射点位置である第1反射点位置を移動物体における前端部の位置であるとし、移動物体検出装置1から近い方の反射点位置である第2反射点位置を移動物体における後端部の位置であるとして、第1反射点位置と第2反射点位置との間の距離である反射点間距離の時間経過による変動量が、反射点間距離の変動量が小さいことを示す予め設定された変動判定条件を満たす場合に、第1反射点位置および第2反射点位置がそれぞれ移動物体の前端部および後端部の位置であると判断する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】送信波照射に対する反射波に基づいて、少なくとも物体までの距離を含む物体単位データを車幅方向角度に対応して取得する。そして、反射波に基づいて得た物体の相対速度及び自車速に基づいて移動物か停止物という認識種別を判定し、認識種別の判定結果に基づいて、移動物の中から自車両180に対する先行車181及び先々行車182の各物体単位データを抽出し、停止物の中から道路に沿って設置された反射体の各物体単位データを抽出する。この後、自車両180、先行車181、及び先々行車182の各物体単位データを用いてこれら3点を円で近似することにより当該円の半径を算出し、円の半径と、反射体の列と、に基づいて道路形状を認識する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な物体単位データを抽出し、物体単位データに基づいて路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、抽出処理の後、前回周期の抽出処理で得た物体単位データを今回周期の抽出処理で得た物体単位データに追加するデータ追加処理を行い、認識処理ではデータ追加処理で得た物体単位データに基づき道路端を認識する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な物体単位データを抽出する。また、抽出した物体単位データの中から、車幅方向の距離が最も自車側に位置する停止物体の横位置を抽出すると共に、車幅方向において最も自車側の停止物体の横位置から所定距離だけ離れた範囲内に位置し、かつ、自車からの直接の距離が最も小さい停止物体を起点に決定する。そして、接続条件として距離が単調増加であるデータ同士を起点から接続してグルーピングして路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な前記物体単位データを抽出する。そして、自車と先行車との間における自車の走行路上および先行車と先々行車との間における先行車の走行路上のいずれかに停止物体が存在する場合、抽出した物体単位データの中から前記走行路上の停止物体に該当するデータを削除する。この後、左角度方向から右角度方向及び右角度方向から左角度方向の両方向についてそれぞれ、接続条件として距離が単調増加であるデータ同士をグルーピングして路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】道路における停止物の中から反射体の物体単位データを抽出し、抽出した反射体の物体単位データに基づいて反射体の列を通る円を近似することにより道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、反射体の物体単位データを抽出する際には、前回周期で抽出した反射体の物体単位データのうち、前回周期で算出した道路形状推定Rを基準とした径方向の所定範囲内に位置するものを今回周期の抽出処理で抽出した反射体の物体単位データに追加する。また、道路形状認識を行う際には、データ追加後の反射体の物体単位データに基づいて道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。
(もっと読む)
物体距離検出装置
【課題】物体に対する距離の検出精度を向上させる。
【解決手段】物体距離検出装置10は、レーダ装置11の発信部11aにより電磁波が発信された時刻から受信部11bにより反射波が受信された時刻までの時間差を検出し、時間差に基づき車両から物体までの距離を算出する距離検出部25と、時間差と反射波の受信強度との対応関係を示す2次元直交座標面上での受信強度分布の波形Fにおける受信強度の増加側および減少側での傾きに応じて、受信強度の極大値(推定ピーク電圧Vpeak)を推定する極大値推定部24と、受信強度分布の波形Fにおける受信強度が電圧閾値Vth以上である時間幅(推定パルス幅W)と、極大値(推定ピーク電圧Vpeak)とに基づいて、距離検出部25により算出された距離を補正する距離補正部26とを備える。
(もっと読む)
車両用物体検知装置
【課題】自車両の外部に存在する物体の静止および移動の状態を精度良く検知する。
【解決手段】車両用物体検知装置10は、レーダ装置12から発信された電磁波の物体上における反射点の位置を算出する反射点算出部21と、自車両から物体までの距離を算出する距離算出部22と、反射点の位置に基づき物体の水平方向の両方の端点を検出する端点検出部23と、検知対象物の何れか一方の端点が自車両から見て比較対象物に重なっているか否かを判定する重なり判定部24と、重なり判定部24により重なっていると判定され、かつ、時間経過と共に検知対象物までの距離が比較対象物までの距離よりも近くなった場合に、検知対象物の前記比較対象物に重なっていない他方の端点の横移動量に基づいて検知対象物の横移動速度を算出する端点移動速度算出部25とにより、検知対象物の横移動速度の検出精度を向上させる。
(もっと読む)
道路形状推定装置
【課題】自車両が走行する道路の形状を従来より正確に推定可能とする道路形状推定装置を提供する。
【解決手段】自車両に搭載され、当該自車両が走行する道路の形状を推定する道路形状推定装置であって、自車両周囲の静止物の存在位置を複数の検出点として検出する物体検出部と、複数の検出点同士を第1の接続方法により線分で順次接続することによって、道路の形状を示す接続線を形成する接続線形成部と、接続線の一部または全部の区間が所定の条件を満たす形状を成している場合、当該区間を、道路に沿って路側静止物が二重に配置された二重路側物配置区間として認識する二重区間認識部と、二重路側物配置区間が検出された場合、当該二重路側物配置区間に含まれる複数の検出点を第2の接続方法により接続し直して接続線を修正する接続線修正部と、接続線に基づいて道路の形状を推定する道路形状推定部とを備える、道路形状推定装置である。
(もっと読む)
物標検出装置、物標検出方法およびプログラム
【課題】歩行者の位置を正確に検出することができる物標検出装置、物標検出方法およびプログラムを提供する。
【解決手段】車両の前方に向かって電波を送信する送信部11と、反射電波を受信する受信部12と、物標が歩行者であるか車両であるかを判定する情報処理を行うとともに、車両に対する物標の位置を演算して求める情報処理を行う情報処理部21と、情報処理部21における情報処理の内容が予め記憶された記憶部22と、が設けられている。記憶部22には、物標が歩行者である場合に行われる歩行者用情報処理の内容、及び、物標が車両である場合に行われる車両用情報処理の内容が予め記憶されている。情報処理部21は、物標が歩行者であると判定された場合には、記憶部22から取得した歩行者用情報処理の内容に基づいて情報処理を行い、物標が車両であると判定された場合には、記憶部22から取得した車両用情報処理の内容に基づいて情報処理を行う。
(もっと読む)
歩行者検出装置、歩行者検出方法およびプログラム
【課題】歩行者をより確実に検出することができる歩行者検出装置、歩行者検出方法およびプログラムを提供する。
【解決手段】車両の前方に向かって電波を送信する送信部11と、車両の前方に存在する物標によって反射された電波である反射電波を受信する受信部12と、歩行者によって反射された電波の特性である歩行者反射電波特性が予め記憶された記憶部22と、受信部12により受信された反射電波の特性を、記憶部22に記憶された歩行者反射電波特性と対比することより、電波を反射した物標が歩行者であるか否かの判定を行う情報処理部21と、が設けられている。受信部12により受信された反射電波の特性と、記憶部22に記憶された歩行者反射電波特性とを対比させることにより、電波を反射した物標が歩行者か否かの判定を行うことで、物標における移動の有無や、移動方向に関わらず、物標が歩行者か否かの判定を行うことができる。
(もっと読む)
21 - 40 / 1,037
[ Back to top ]