
Fターム[5J070AE01]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 自動車 (1,037)
Fターム[5J070AE01]に分類される特許
41 - 60 / 1,037
車両用障害物検出装置
【課題】路面をターゲットであると誤検知することを防止することができる車両用障害物検出装置の提供を目的とする。
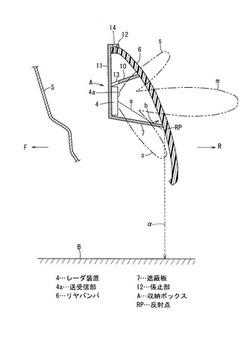
【解決手段】バンパ6裏面と車輪との間に設けられて、該バンパ6を透過して外方向に電波を送信することで障害物を検出するレーダ装置4を備えた車両用障害物検出装置であって、レーダ装置4の下部または下方には、レーダ装置4からの送信波の一部aがレーダ装置4の送信部とバンパ6裏面との間を通過して路面Bへ到達し、路面Bから帰来する路面到達波αにより生じる誤検知を防止する誤検知防止構造7が設けられたことを特徴とする。
(もっと読む)
車両用障害物検出装置

【課題】車輪判定時に不要な対象物を除去し、自車の車輪がターゲットであると誤検知することがなく、障害物検出精度の向上を図る車両用障害物検出装置を提供する。
【解決手段】バンパと車輪との間に設けられて車両外方へ送信波を送信することにより障害物を検出する検出手段と、
検出手段の検出結果に基づいて障害物を判定する判定手段R1と、判定手段R1の検出結果により自車の車輪を検出した時、車輪を検出対象から除去する除去手段S8,S9とを備えたことを特徴とする。
(もっと読む)
車両用障害物検出装置
【課題】縁石などの道路構造物がターゲットであると誤検知するのを防止できる車両用障害物検出装置の提供を目的とする。
【解決手段】車両の少なくとも左右何れか一方においてバンパ6裏面と車輪2との間に設けられて車両外方へ電波を送信することにより障害物を検出するレーダ装置4を備えた車両用障害物検出装置であって、
上記レーダ装置4からの送信波の一部が車両外側の道路構造物に到達し、該道路構造物から帰来する道路構造物到達波αにより生じる誤検知を防止する誤検知防止手段7を備えたことを特徴とする。
(もっと読む)
障害物検知装置
【課題】 障害物検知装置において、車両と障害物との距離を測定して使用者に報知するだけでなく、使用者が自在に設定した距離が、車両と障害物との距離の報知を妨げることなく報知されるようにすることである。
【解決手段】 車両1の障害物検知装置100は、領域P1〜P4に対応する報知形態で、そのときの衝突回避距離を使用者に報知するという従来の機能(第1の機能)に加えて、使用者が自在に設定した距離(例えば、バックドア開放距離L)を報知する機能(第2の機能)を有する。しかも、バックドア開放距離Lの報知は、衝突回避距離の報知に重ねて、しかも両者が混同しないような報知形態で報知される。
(もっと読む)
物体識別装置、および物体識別プログラム
【課題】車両の進行方向に存在する物体を識別する物体識別装置において、物体を識別する際の処理負荷を軽減できるようにする。
【解決手段】衝突防止システムにおいては、レーダ装置から物体の位置および反射波の強度を含む物体情報を取得し(S110、S120)、進行方向を撮像した撮像画像を取得する(S130)。そして、物体情報に基づく反射波の強度に応じて、撮像画像中の物体を識別する際の画像処理手法を、予め設定された複数の画像処理手法の中から選択し(S140)、選択された画像処理手法を実施することで、取得した撮像画像中に存在する物体を識別し、この識別結果を出力する(S210〜S370)。このシステムによれば、物体からの反射波の強度に応じて、進行方向に存在する物体をある程度区別し、区別した物体に適した画像処理手法を選択することができるので、画像処理によって正確に物体を識別でき、処理負荷を軽減できる。
(もっと読む)
踏切障害物検知装置
【課題】周囲温度の変化等にかかわらず踏切道内における障害物の有無を安定して検知することのできる踏切障害物検知装置を提供する。
【解決手段】踏切障害物検知装置1は、踏切道10を含む検知領域内に電波を送信するとともに、この送信した電波に対する反射波を受信する送受信機2,3と、送受信機2,3によって受信された反射波の信号レベルと、あらかじめ設定された閾値とを比較して踏切道10内における障害物の有無を判定する信号処理部6と、を含む。信号処理部6は、送受信器2,3による電波の送信が可能な領域内に存在する特定の固定物(例えば反射板4a,5a)による反射波の信号レベルを監視し、この監視された反射波の信号レベルが変動した場合に送受信器2,3によって受信された反射波の信号レベル又は上記閾値を補正する。
(もっと読む)
ホログラフィックレーダ
【課題】物標が移動している場合には、総経路長差に差が生じ、ホログラフィック合成ができないという問題が生じていた。
【解決手段】本発明のホログラフィックレーダは、第1及び第2の送信波を送信する送信部(S)と、第1及び第2の反射波を受信する受信部(R)と、第1の送信波を送信してから第2の送信波を送信するまでの時間間隔である送信周期を変えて、第1及び第2の送信波を複数回送信するように第1及び第2の送信アンテナを制御する送信波制御部(50)と、送信波を複数回送信した場合の物標からの反射波の検出状況から求められる各周波数ピークに含まれる物標の相対速度に基づき、物標が複数であった場合にその相対速度差から最も適している送信時間間隔の送信周期を選択し、選択した送信周期で第1及び第2の送信波を送信した場合の第1及び第2の反射波を合成して物標の検出を行う方位演算部(11)と、を有することを特徴とする。
(もっと読む)
車載レーダ装置
【課題】自車の走行に支障をきたす障害物と、障害になり得ない停止物とを精度よく区別して、衝突回避装置若しくは衝突被害軽減装置に於ける誤作動を防止させることのできる車載レーダ装置を得ることを目的とする。
【構成】所定の演算周期毎に前記物体の識別を行う物体識別部と、前記物体識別部が識別した前記物体と前記車両との間の相対的状態を判定するとともに、その判定結果に基づいて、次回の前記演算周期に於いて前記第1の角度検出部と前記第2の角度検出部とのうちの一方から他方へ切り替えて前記物体識別部に前記入射角度の値を入力する切り替え制御を行なう状態判定部とを備えた。
(もっと読む)
車載用レーダ装置
【課題】対象物の水平方向方位と鉛直方向方位の両方を検出するコストを低減した車載用レーダ装置を得る。
【解決手段】送信部から送信され対象物より反射された電波を、水平方向に複数配列された第1の受信アンテナ素子と、第1の受信アンテナ素子と同一平面状に第1の受信アンテナ素子とは別に鉛直方向に複数配列された第2の受信アンテナ素子とにより受信し、受信した信号と送信部から分配された信号とをミキサにより混合し、ダウンコンバートされた信号を受信アンプにより増幅する受信部と、受信部からの受信信号に基づき、所定範囲内に存在する対象物の距離,相対速度,方位を検出する信号処理部とを備える車載用レーダ装置において、受信部を構成するミキサの後段に、第1又は第2の受信アンテナ素子と同数の回路切替部を備え、回路切替部により第1の受信アンテナ素子への接続と、第2の受信アンテナ素子への接続とを切り替える。
(もっと読む)
レーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラム
【課題】軸ずれ判定に用いる物標の条件に拘束されないレーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラムを提供することを課題とする。
【解決手段】物標の方向をアンテナ3の受信信号に基づいて特定するレーダ装置1用の演算装置15であって、前記アンテナ3を搭載した移動体が移動中に前記受信信号によって測位される物標のデータから、前記移動体の進行方向に対する物標の横方向への相対的な移動の大きさを算出し、前記レーダ装置1の走査方向の基準軸と前記移動体の進行方向の基準軸との相対的な傾きを前記移動の大きさに基づいて評価する演算部6を備える。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】デメリットシーンにおいてより正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体までの距離及び車幅方向の角度に基づき、車両前方の道路形状を認識し、その認識された道路形状及びその認識程度に基づき、物体が自車と同一車線上にいる可能性を判定し、その判定結果に基づいて自車線確率を補正するための補正値を算出する。そして、自車走行路の曲率と認識された道路形状の曲率とに乖離があるか否かを判定し、乖離がない場合、自車線確率を補正値にて補正し、その補正後の自車線確率に基づいて先行車を選択する一方、乖離がある場合、自車線確率を補正値にて補正せずに自車線確率に基づいて先行車を選択する。
(もっと読む)
移動体情報計測装置及び移動体情報計測方法
【課題】複数の車両等の移動体が、道路のような移動路上を移動する際、個々の移動体の情報を正確に求めることができる移動体情報計測装置及び移動体情報計測方法を提供する。
【解決手段】移動体情報計測装置は、移動路の路面上方に設けられた第1センサを用いて、計測領域を通過する個々の移動体の通過開始時刻及び通過終了時刻を含む通過情報を検知し、さらに、前記計測領域に対して前記移動体の移動方向の上流側あるいは下流側の領域において個々の移動体の位置と移動速度を含む移動情報を、第2センサを用いて検知する。このとき移動体情報計測装置は、検知された前記移動情報から、移動体が前記計測領域を通過する、あるいは通過した通過時刻を算出し、この通過時刻を用いて、前記移動情報を前記通過情報と照合することにより、前記通過情報と前記移動情報とを関連付け、関連付けた前記通過情報と前記移動情報とを用いて個々の移動体の情報を求める。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及びプログラム
【課題】精度の良い方位検出ができる電子走査型レーダ装置、受信波方向推定方法及びプログラムを提供する。
【解決手段】同じビート周波数として示される周波数ポイントであって、第1の方位スペクトルを算出した周波数ポイントに対応する周波数ポイントにおいて、第1の方位スペクトルを算出する処理において定めた次数より低い次数に定めた第2の方位スペクトルが算出される。ターゲット抽出部が、第1の方位スペクトルが算出された周波数ポイントに対応する複数のピーク間の相対角度と、第2の方位スペクトルのピークが示すピーク角度とから複数のピーク間の相対レベル差を算出する。そして、電子走査型レーダ装置は、複数のピーク間の相対レベル差に基づいて、ターゲットを検出する。
(もっと読む)
パルスレーダ装置
【課題】検知精度や最大検知距離を低下させることなく距離分解能を変化させることが可能なパルスレーダ装置を提供する。
【解決手段】送信信号SPのパルス幅は、動作モードによらず一定とし、動作モードが通常モードの時には、測定期間Tsの全体を、第1ゲート幅G1に設定されたゲート信号GPによりスキャンを実行し、動作モードが高分解能モードの時には、通常モードで近距離物標が検出された分割区間AKだけを、第1ゲート幅G1より幅の狭い第2ゲート幅G2に設定されたゲート信号GPによりスキャンを実行する。
(もっと読む)
ホログラフィックレーダ装置
【課題】複数の物標が異なる速度で移動する場合に、常にホログラフィック合成法を用いることは難しいという問題があった。
【解決手段】本発明のホログラフィックレーダ装置は、物標に向けて電波を送信する複数の送信アンテナ(1)と、反射波を受信する複数の受信アンテナ(3)と、受信波に基づいて、ホログラフィック合成法により物標が存在する第1の角度を算出する第1角度推定部(22)と、ホログラフィック空間平均法により物標が存在する第2の角度を算出する第2角度推定部(23)と、ホログラフィック合成法が成立している度合いを表すホログラフィック合成信頼性定数を算出するホログラフィック合成信頼性定数算出部(24)と、を備え、第1の角度及び第2の角度の少なくともいずれか一方と、ホログラフィック合成信頼性定数とに基づいて、物標の角度を算出することを特徴とする。
(もっと読む)
FM−CWレーダ装置及びそれに用いる移動目標信号検出方法
【課題】 同一距離に不要信号が存在する環境下でも移動目標信号を検出可能なFM−CWレーダ装置を提供する。
【解決手段】 FM−CWレーダ装置は、連続波信号と反射信号とを混合した信号から一定の時間毎に得られるスペクトラムを同じビート周波数毎に時間方向にそれぞれ正規化処理を行う正規化処理器(20)と、正規化処理器にて得られた時間対ビート周波数の2次元平面において線分検出を行う線分検出器(21)と、線分検出器にて検出された線分から所定の時刻のビート周波数を推定する周波数推定器(22)と、周波数推定器にて得られたビート周波数から目標の距離と速度とを計算する距離・速度検出器(23)とを有する。
(もっと読む)
レーダ装置及び該レーダ装置の到来角算出方法
【課題】モードベクトルを使用して物標からの反射信号の到来角を検出するレーダ装置において、モードベクトルを実測値に変更して電波到来方向の誤検出を低減する。
【解決手段】物標からの反射波を複数アンテナで受信した受信信号各個の受信処理を行い、モードベクトルに基づいて受信信号の到来角を算出するレーダ装置において、レーダ装置から所定角度で特定の距離に置いた仮想物標からの反射波を受信信号データとして取得し、仮想物標のレーダ装置からの距離相当の周波数の受信信号を取り出し、受信信号から計算により得た共分散行列に対して固有値分解を行い、求めた固有値の中の最大値を検索して得た固有値に対応する固有ベクトルを求め、これを所定角度における実測値のモードベクトルとしてメモリに記憶し、モードベクトルとして記憶した実測値のモードベクトルを使って受信信号の到来角を算出するレーダ装置の到来角算出方法である。
(もっと読む)
車両の物体検出装置
【課題】物体の検出精度の低下や誤検出が少なく、認識精度を向上できる車両の物体検出装置を提供する。
【解決手段】ミリ波レーダセンサ4は、車両1の前方の物体2を検知し、送信波と受信波とのビート信号からピーク周波数を検出する。他車情報演算処理部11は、車車間通信又は路車間通信によって取得した他車両3の位置及び速度と、自車位置センサ5及び自車速センサ6によって取得した車両1の位置及び速度とから他車両3と車両1との参照距離及び参照相対速度を求める。判定処理部12は、ミリ波レーダセンサ4が検出したピーク周波数から、参照距離と参照相対速度とに相当するピーク周波数を探索し、探索できた場合は物体2を他車両3と判定する。物体情報演算処理部13は、他車両3と判定した物体2のピーク周波数を除いたピーク周波数から、他車両3と判定した物体2を除く物体2と車両1との距離及び相対速度を演算する。
(もっと読む)
レーダ装置
【課題】受信アンテナが受信した位相折り返しゴーストを、ビームパターンの異なる電波を送信することによって判定し、レーダ装置の精度向上を図る。
【解決手段】到来波を複数のアンテナで受信した反射波の位相差から物標の角度を算出して物標位置を検出する電子スキャン方式のレーダ装置において、送信アンテナを2本設けてそれぞれからビームパターンの異なる電波を交互に送信し、2つのビームパターンBP1,BP2による反射波を受信した各受信信号から反射波それぞれの到来角度、受信レベル及びレベル差を算出し、受信された反射波の受信レベル差が、到来角度を合わせた上で所定のレベル差以上か否かを判定し、判定結果に応じて反射波の到来角度に実在しない物標を検出するレーダ装置である。2つのビームパターンは送信軸を左右に傾けることによって実現できる。
(もっと読む)
レーダ装置
【課題】高速移動するターゲットのコヒーレント積分利得を維持し、低速移動するターゲットのコヒーレント積分利得を高め、到来方向推定精度を向上する。
【解決手段】レーダ送信部は、パルス圧縮符号を高周波送信信号に変換して送信アンテナから送信する。レーダ受信部は、受信信号と送信信号との相関値をコヒーレント積分する複数のアンテナ系統処理部と、複数のアンテナ系統処理部の各出力に基づいて相関行列を生成するp(整数)個の相関行列生成部と、p個の相関行列生成部のうち1つ又は複数の相関行列生成部の出力を加算するp(整数)個の加算部と、生成された各相関行列のうち、コヒーレント積分利得が最大の相関行列を生成した相関行列生成部を選択する出力選択制御部と、出力選択制御部により選択された相関行列生成部に応じて、p個の加算部の各出力のうちいずれかの出力を選択する出力選択部と、を有する。
(もっと読む)
41 - 60 / 1,037
[ Back to top ]