
Fターム[5J070AE01]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 自動車 (1,037)
Fターム[5J070AE01]に分類される特許
61 - 80 / 1,037
FMCWレーダーシステム
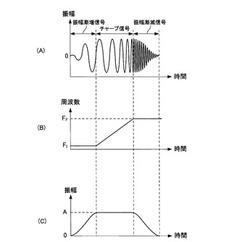
【課題】1つのアンテナで間欠的に送受信を行う場合にもターゲット検出能力の劣化を防止することのできるFMCWレーダーシステムを提供する。
【解決手段】送信部と、アンテナと、受信部と、アンテナ共用部とを備えるFMCWレーダーシステムであって、送信部がローカル信号発生部と、送信信号発生部と、送信側ミクサと、間欠的に送受信開始指令を出力する送信側制御部と、を備え、受信部が、ビート波を生成する受信側ミクサと、ハイパスフィルタと、ターゲット情報抽出部と、を備え、送信信号発生部が、送受信開始指令の読み込み後に、振幅が零から所定の振幅まで徐々に大きくなる振幅漸増信号、周波数が所定の範囲で連続的に変化するチャープ信号、および振幅が零まで徐々に小さくなる振幅漸減送信信号を順次出力する。
(もっと読む)
物体認識装置

【課題】車載カメラのような他のセンサをさらに備えることなく低コストに、車載レーダが受信した反射点群のパターンから認識対象の物体を認識できるようにする。
【解決手段】レーザレーダ2が受信した反射点群のパターンの自車両1に対して反対方向に屈曲したL字状部分を分離処理部6により分離し、分離処理部6が分離したL字状部分が一部を構成する矩形に基づき、物体属性推定部8により認識対象の物体を認識する。
(もっと読む)
レーダ装置
【課題】検知範囲の変更が可能で、而も小型化を可能としたレーダ装置を提供する。
【解決手段】中心に設けられる信号処理ユニット2と、該信号処理ユニットに組込まれ、ホーン型送受信アンテナ6を有する少なくとも1つの高周波ユニット3とを具備し、前記信号処理ユニットは円周方向に等角度で順次傾斜する側面を有し、内部に信号処理部を有すると共に前記側面には前記信号処理部に接続されたソケットが設けられ、前記高周波ユニットは上下に縦長の送信用アンテナ開口21と受信用アンテナ開口22とを有すると共に前記ソケットに嵌合するコネクタとを有する。
(もっと読む)
レーダ装置
【課題】互いに隣り合う素子アンテナで受信した信号の位相差を用いてターゲット方位の計測を行なう場合、角度アンビギュイティが発生し、レーダ装置としての有効な測角範囲を狭めてしまう。
【解決手段】複数の素子アンテナにより1つの受信チャンネルを構成する場合、互いに隣り合わない位置関係に配置された複数の素子アンテナRX1−1、RX1−2を同一の受信チャンネルとして組み合わせて信号合成することにより、角度アンビギュイティが発生し始める角度をレーダの視野角よりも可能な限り広角へと追いやり、レーダとして有効な測角範囲を最大限確保することができる。しかも複数の素子アンテナは不等間隔で配置されている。
(もっと読む)
センサ統合システム及びセンサ統合方法
【課題】複数種類のセンサによる観測データを組み合わせて、目標物の高精度な移動軌跡を抽出する。
【解決手段】プロセッサと、前記プロセッサに接続される記憶装置と、前記プロセッサに接続される出力装置と、を備えるセンサ統合システムであって、前記記憶装置は、複数のセンサによって観測された観測データを保持し、前記観測データはあらかじめ規定された項目のうち選択的に記述された項目を含み、前記プロセッサは複数の前記観測データの選択記述された前記項目を組み合わせ、一つ以上の目標物の移動軌跡を推定し、前記出力装置は、前記移動軌跡を示す情報を出力する。
(もっと読む)
レーダ装置及び目標探知方法
【課題】被探知目標を適正に探知する開口合成を可能とする。
【解決手段】目標を探知するレーダ装置において、空間位相が等しくなる2以上の基準パスを形成する2以上の送信アンテナと受信アンテナとの組合せを含む、2以上の送信アンテナ,及び2以上の受信アンテナと、各基準パスにおける受信アンテナで受信される受信信号の包絡線を取得する包絡線検波部と、各基準パスの受信信号の包絡線間の積分距離の最小値を与える遅延量から基準パス間の位相補正量を決定する決定部と、決定された位相補正量を用いて、2以上の受信アンテナで受信される全ての受信信号の位相を揃える補正部とを含む。
(もっと読む)
レーダ装置
【課題】並走して走行する対向車を正確に検出することができないという問題が生じていた。
【解決手段】本発明のレーダ装置は、物標に対して電波を送信する送信アンテナ(14)と、物標からの反射波を受信する受信アンテナ(15)と、反射波に基づいて、自車両と同じ進行方向に向かって移動する先行車及び先行物標の位置を検出し、先行物標の位置が、先行車の位置を基準とした所定の先行車判定範囲内にある場合は、先行物標は先行車と同一と判定する先行車検出部(35)と、反射波に基づいて、自車両の進行方向と反対の方向に向かって移動する対向車及び対向物標の位置を検出し、対向物標の位置が、対向車の位置を基準とした所定の対向車判定範囲内にある場合には、対向物標は対向車と同一と判定する対向車検出部(36)と、を有し、対向車判定範囲は、先行車判定範囲よりも狭くなるように設定されることを特徴とするレーダ装置。
(もっと読む)
電波発射源検出センサ及び自動料金収受システム
【課題】所定のレーンに設置された路側器と、その隣接レーンに存在する車載器との間で確立された誤通信を中断し、車載器に対する誤課金を防止することが可能な電波発射源検出センサと、このセンサを用いた自動料金収受システムとを提供する。
【解決手段】第1及び第2のレーンに設置され、移動体に所持された応答器と通信を行う第1及び第2の路側器と接続する電波発射源検出センサは、アンテナ部、検波部、方向特定部、誤通信判定部を具備する。アンテナ部は、第1及び第2のレーンを含む受信ビームにより、応答器からの応答信号を受信する。検波部は、応答信号から必要信号を検波する。方向特定部は、検波結果に基づいて、電波強度、到来方向及び応答周波数を取得する。誤通信判定部は、電波強度、到来方向及び応答周波数に基づき、応答器との通信は誤りであるとの旨の誤通信通知を第1及び第2の路側器へ出力する。
(もっと読む)
レーダ装置及び該レーダ装置における受信電力の算出方法
【課題】高分解機能処理を用いて電波の到来方向を推定する電子スキャン式レーダ装置において、複数物標に対して受信した各到来波の電力を正確に算出する。
【解決手段】所定の角度推定方式を用いて反射波の到来方向の推定を行う電子スキャンを利用した車載レーダ装置において、各アンテナの受信信号から算出した各角度に対するモードベクトルMV1,MV2を求め、受信信号RSのベクトルを当該モードベクトルMV1,MV2の方向に分解し、分解したベクトルPV1,PV2の長さを各物標から到来した反射波の受信電力とする方法である。この方法により、複数の物標があっても、複数の到来波の各電力を正確に算出でき、ペアリングが正確に行えて物標の検出精度が向上し、電子スキャンを利用した車載レーダ装置の誤動作が防止される。
(もっと読む)
レーダ装置
【課題】 物標との距離以外の情報が得られない検出エリアを含む複数の検出エリアにて物標検出を行うレーダ装置において、距離以外の情報が得られない検出エリアでも、移動物標であるか否かを速やかに判断できるようにする。
【解決手段】側方検出エリアで追跡中の物標が存在せず(S110:NO)、側方探査モードでの測定結果に基づき物標(側方検出物標)が検出された場合(S120:YES)、同時に、後方探査モードでの測定結果に基づき重複エリアで移動物標(重複エリア移動物標)が検出されていれば(S130:YES,S140:NO)、側方検出物標を側方検出エリアにて追跡の必要がある追跡対象物標として登録すると共に、その登録した追跡対象物標に、重複エリア移動物標の情報を引き継ぐ(S150)。
(もっと読む)
アンテナ装置、レーダ装置、車載レーダシステム
【課題】単一の基板に形成されているにも拘わらず、180°を越えるような広い検知エリアをカバーできるアンテナ装置、そのアンテナ装置を利用したレーダ装置、車載レーダシステムを提供する。
【解決手段】アンテナ基板6の面方向を主放射方向とする平面放射用アンテナ部3と、アンテナ基板6の端方向を主照射方向とする水平放射用アンテナ部4とを、アンテナ基板6の異なるパターン形成層に形成する。これにより、両アンテナ部3,4を同一のパターン形成層に形成する場合と比較して、水平放射用アンテナ部4の指向性をより部品載置面6b側にシフトさせることができる。その結果、単一のアンテナ基板6でカバー可能な検知エリアを広角化(例えば、180°以上)することができる。
(もっと読む)
レーダ装置
【課題】物標がアンテナのメインローブ方向に在るのか、あるいはサイドローブ方向に在るのかを比較的簡易な構成で判別できるようにしたレーダ装置を提供すること。
【解決手段】信号処理部100は、サイドローブの指向特性が異なる2つの受信アンテナRA1,TA2を選択的に切り替えて物標との距離を算出し、算出した距離が同一距離であって、その距離の算出の基礎とした各受信アンテナの受信レベルの差を判定する。
(もっと読む)
レーダ装置
【課題】距離分解能以内に複数のターゲットが存在し、各ターゲットからの反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向推定精度を向上する。
【解決手段】レーダ送信部は、所定符号長のパルス圧縮符号を高周波送信信号に変換して送信アンテナから送信する。レーダ受信部は、複数の受信アンテナ毎にアンテナ系統処理部を有する。アンテナ系統処理部は、パルス圧縮符号におけるパルス送信レートの2倍のサンプリングレートで、受信信号をデジタルデータに変換し、奇数のサンプルタイミングに応じて変換されたデータとパルス圧縮符号との第1相関値を演算し、偶数のサンプルタイミングに応じて変換されたデータとパルス圧縮符号との第2相関値を演算する。レーダ受信部は、各第1相関値及び第2相関値に基づいて、高周波送信信号の距離分解能以内にターゲットが複数存在すると、各ターゲットを分離して検出する高分解能処理部を備える。
(もっと読む)
測位情報形成装置、検出装置、及び測位情報形成方法
【課題】物体検出精度を向上する測位情報形成装置、検出装置、及び測位情報形成方法を提供すること。
【解決手段】測位情報形成装置100において、合成部103が、カメラ距離マップ情報とレーダ距離マップ情報とを合成し、「合成マップ情報」を生成する。この合成マップ情報は、検出装置200において物体検出処理に用いられる。こうすることで、カメラ距離マップ情報とレーダ距離マップ情報とを合成した情報に基づいて物体検出することができるので、物体検出精度を向上することができる。すなわち、カメラ距離マップ情報とレーダ距離マップ情報とを合成することにより、地面又は壁面等からの反射による不要なノイズの除去が期待できるので、物体検出閾値を低く設定することができる。このため、従来では、検出不可能と判断された物体であっても、検出することができる。
(もっと読む)
車載用レーダ装置
【課題】車両中心軸と走査中心軸との軸ズレ補正処理に要する演算による通常の検出処理への影響を低減し、軸ズレ補正処理を高精度に実行可能な車載用レーダ装置を得る。
【解決手段】車両とターゲットとの距離、ターゲットに対する車両の相対速度、並びにターゲットの位置および方向の少なくとも1つをターゲット情報として検出する車載用レーダ装置1であって、車両の後進状態を検出する車両後進検出部11と、車両の後進距離を検出する後進距離検出部12と、車両の後進時に、車両の旋回情報および後進距離に基づいて、車両の実旋回角度を取得する旋回角度取得部13と、車両の後進時に、ターゲット情報に基づいて、車両の推定旋回角度を算出する旋回角度推定部14と、車両の後進時に、実旋回角度と推定旋回角度との差に基づいて、車両の車両中心軸と車載用レーダ装置1の走査中心軸との軸ズレを補正する軸ズレ補正処理部16とを備える。
(もっと読む)
制御装置、レーダ検知システム、レーダ検知方法
【課題】レーダから出力された検知結果によって異常を監視し、レーダの性能の低下を検知する。
【解決手段】取得部1aは、レーダ2から出力された信号に基づき、車道を走行した複数台の走行車両のそれぞれについて、検知開始位置および検知終了位置の座標を取得する。算出部1bは、検知開始位置の座標の平均値および検知終了位置の座標の平均値を算出し、算出結果を有する検知状況情報を検知状況情報記憶部1eに記憶させる。比較部1cは、検知状況情報が示す検知開始位置の座標の平均値および検知終了位置の座標の平均値とそれぞれの所定の基準値とを比較する。異常判定部1dは、比較部1cによる比較結果に基づいて、レーダ2の異常の発生の有無を判定し、異常が発生したと判定した場合には異常の発生を示す情報を出力する。
(もっと読む)
電波発射源検出センサ、自動料金収受システム及び路側器
【課題】所定のレーンに設置された路側器と、その隣接レーンに存在する車載器との間で確立された誤通信を中断し、車載器に対する誤課金を防止することが可能な電波発射源検出センサと、このセンサを用いた自動料金収受システム及び路側器とを提供する。
【解決手段】所定のレーンに設置され、移動体に所持された応答器からの応答信号を第1の受信ビームにより受信し、応答器と通信を行う路側器に接続される電波発射源検出センサは、アンテナ部、検波部、方向特定部及び誤通信判定部を具備する。アンテナ部は、第2の受信ビームにより応答信号を受信する。検波部は、応答信号から、所定の検波周波数により必要信号を検波する。方向特定部は、検波結果に基づいて、電波強度を測定し、応答信号の到来方向を特定する。誤通信判定部は、電波強度及び到来方向等に基づいて、路側器と応答器との通信は誤りであるか否かを判定し、誤りであれば、誤通信通知を路側器へ出力する。
(もっと読む)
移動体衝突防止装置及び該装置を搭載した移動体
【課題】移動体の衝突を防止する移動体衝突防止装置に関する。
【解決手段】移動体に配置され、他の移動体との間で信号を送受信する移動体衝突防止装置10であって、測定波を送信する送信部120と、前記送信部に接続され、該送信部を駆動する駆動信号を生成し該送信部を駆動する送信駆動部110と、前記他の移動体から送信された測定波を受信する受信部130と、前記受信部が受信した測定波の強度により、前記移動体と前記他の移動体の間の相対位置を計算する計算部140と、前記計算部によって計算された結果に基づいて前記移動体が前記他の移動体と衝突するか否かを判断する衝突判断部150とを備える。
(もっと読む)
自動車用レーダシステムおよびその使用方法
【課題】標的ゾーン46内の物体34,36の存在を示すための検出信号を生じる。
【解決手段】車両用レーダシステム44は送信部56および受信部58を備え、送信部56が、標的ゾーン46に無線信号を出力するための単一ビームアンテナ72を含む。受信部58は直接受信信号78および間接受信信号80を受信するための単一ビームアンテナ76を含む。受信信号78、80は、標的ゾーン46内の物体34、36から無線信号の反射である。間接受信信号80は物体34、36から車両42の反射パネル54に反射され、受信アンテナ76で受信するために間接受信信号80は反射パネルに反射される。標的ゾーン46内の物体34、36の存在を指示する検出信号を生じるために受信信号78、80は合算される。
(もっと読む)
通信測距複合システム、通信測距装置、親機および子機
【課題】通信フレームの変調方式にかかわらず、効率的かつ精度よく情報の伝達と測距とを行うことが可能な通信測距複合システム等を提供する。
【解決手段】通信測距複合システムでは、親機3が制御フレームの送信後(第1の送信時間α後)に第1のパルス信号を子機4に送信し、子機4が制御フレームの受信後(第2の送信時間β後)に第2のパルス信号を親機3に送信する。そして、親機3が第1のパルス信号の送信タイミングから第2のパルス信号の受信タイミングまでの時間(待機時間Tm)を算出し、子機4が第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミングまでの時間(応答時間Ts)を算出する。よって、制御フレームの送信及び受信タイミングを精確に検出する必要がなく、第1の送信時間αや第2の送信時間βにズレが生じても、パルス信号のエッジさえ検出できれば、待機時間Tmおよび応答時間Tsの算出に影響を与えずに済む。
(もっと読む)
61 - 80 / 1,037
[ Back to top ]