
Fターム[5J070AE01]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 自動車 (1,037)
Fターム[5J070AE01]に分類される特許
101 - 120 / 1,037
半導体集積回路およびその動作方法
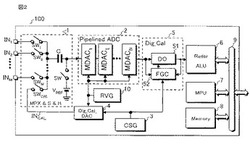
【課題】車載用ミリ波レーダ装置に搭載されA/D変換器とMPUを内蔵する半導体集積回路で、内蔵A/D変換器のチップ占有面積を削減して、内蔵A/D変換器の分解能を改善する。
【解決手段】半導体集積回路で、レーダ装置の複数の受信信号は、単一のデジタル補正型A/D変換器によってA/D変換される。単一のA/D変換器のデジタル補正型A/D変換器は、受信インターフェース1のマルチプレクサから出力される複数の受信信号を順次にA/D変換するフォアグラウンドデジタル補正型A/D変換器2、3、4、5である。単一のA/D変換器は、従属接続された複数の変換器MDAC1…Nを有するパイプライン型A/D変換器2を含む。半導体集積回路は、デジタル補正のための補正用信号生成部3とデジタル補正用D/A変換器4とデジタル補正部5を具備する。
(もっと読む)
レーダ装置

【課題】ターゲットにより反射された信号の直交検波後のI信号とQ信号との間に生じる位相ずれ量をリアルタイム且つ適正に補正し、ターゲットの到来角度の推定精度の劣化を抑制する。
【解決手段】所定の送信周期で高周波送信信号を送信アンテナから送信し、ターゲットに反射された反射波の信号を受信アンテナで受信する。所定の符号長の符号系列を分割したサブ符号長を有する第1、第2サブ符号系列と、第1、第2サブ符号系列にそれぞれ2種類の異なる係数を乗じた第3、第4、第5、第6サブ符号系列とから、第1送信周期では、第3サブ符号系列と第4サブ符号系列とを連結した符号を変調した第1の送信信号を生成する。第2送信周期では、第4サブ符号系列と第5サブ符号系列とを連結した符号を変調した第2の送信信号を生成する。生成された第1及び第2の送信信号を高周波送信信号に変換し、送信アンテナから送信する。
(もっと読む)
センサを用いた追突事故防止装置
【課題】速度のみが検出可能な非接触式のミリ波センサの出力情報のみで、追突事故を防止するために運転手に警報を与えるシステムを比較的安価に提供する。
【解決手段】複数のミリ波センサにより、同一方向の目標物との相対速度が測定可能な構成となっていて、かつ各々のミリ波センサの検出範囲を異なるものとし、最も遠くから検出できるミリ波センサから順に判定用の速度閾値を小さくなるようにあらかじめ設定し、各々のミリ波センサで計測した速度がそれぞれ設定された閾値以上であるか判定し、閾値以上であった場合には追突する可能性があると判定するように構成した。
(もっと読む)
レーダ装置、路側器及び車載装置
【課題】探知波を反射した物体が特定の反射部材か否かを識別できるレーダ装置を提供する。
【解決手段】レーダ装置1は、第1の偏波面を持つ探知波を放射する送信アンテナ4と、探知波が物体によって反射された、第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナ(5−1)と、探知波が物体によって反射された、第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナ(5−2)と、第2の反射波の信号電力が第1の反射波の信号電力よりも大きい場合、第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材であると判定する判定部(9)とを有する。
(もっと読む)
信号処理装置、レーダ装置、車両制御システム、および、信号処理方法
【課題】連続性判定おいて検知点を適切に処理することを目的とする技術を提供する。
【解決手段】ピーク信号の組み合わせを誤ったペアリングで検出された可能性のある検知点を特定検知点とし、この特定検知点に特定された過去検知点と、他の過去検知点とで減算する減算値を変更する。これにより、過去検知点が特定検知点に特定された過去検知点か他の過去検知点かに応じてメモリからの削除のタイミングを調整できる。
(もっと読む)
死角車両検出レーダーシステム
【課題】送信波の平均電力が高く、回折波の微弱な信号のS/N比を改善することができ、信号機のない交差点で死角から進入する見通し外の車両等目標物を高精度に検知することができ、出会いがしらの衝突といった事故を減少させることができる死角車両検出レーダーシステムを得る。
【解決手段】送受信信号のビート周波数信号に基づいて測定対象物までの距離を求めるFMCW方式に基づくものであって、回折損の異なる低周波数と高周波の信号を同時に送信し、それぞれに対応した目標物からの反射波を受信する送受信手段(1−7、1’−7’)と、周波数差に基づく回折波の強度差により死角車両を検出する死角車両検出部8とを備える。
(もっと読む)
レーダ装置
【課題】安定した相関追尾ができるレーダ装置を提供する。
【解決手段】FMCW方式のダウンスイープまたはアップスイープの信号を繰り返し送受信する送受信器20と、送受信器からの信号に基づく測角値を用いてビート周波数の空間を表すfbx−fby軸に座標変換するビート周波数軸変換部36と、ビート周波数軸変換部における変換によって得られたfbx−fby軸の空間において位置、速度および加速度を用いて相関追尾を行う相関追尾部37と、相関追尾部における相関追尾によって得られた結果をX−Y軸の位置および速度に変換するX−Y軸変換部38を備える。
(もっと読む)
レーダ装置
【課題】異なる位置で反射されたレーダ波の合成波を受信した場合に、その合成波を各反射点を認識できる程度に分離し、各反射点までの距離を算出することができるレーダ装置の提供。
【解決手段】物標との距離を検出するレーダ装置であって、レーダ波を送信する送信手段と、上記レーダ波が物標で反射されたときの反射波を受信する受信手段と、上記受信手段で受信された反射波をウェーブレット解析することにより、反射波受信時刻と受信した反射波のエネルギーとの関係を表す波形を求める解析手段と、上記解析手段で求めた波形のエネルギーピーク部に対応する反射波受信時刻に基づいて物標との距離を求める距離算出手段と、を備える。
(もっと読む)
物体検出装置
【課題】従来に比して物体を正確に検出可能とする物体検出装置を提供する。
【解決手段】自車両周辺の物体を検出する物体検出装置であって、自車両に搭載され、検知領域内に存在する物体を検出する物体検出手段と、少なくとも自車両が走行する道路の周辺に存在する障害物の位置情報を外部から取得する周辺情報取得手段と、物体検出手段の検知領域を周辺情報取得手段によって取得した障害物の位置情報に応じて変更する検知領域変更手段とを備える物体検出装置である。
(もっと読む)
角速度推定装置及びコンピュータプログラム及び角速度推定方法
【課題】移動体の角速度を精度よく推定する。
【解決手段】周辺物体観測装置811(レーダ)は、移動体の周辺に存在する物体について、移動体を基準とした物体の相対位置を繰り返し観測する。相対位置取得部211は、周辺物体観測装置811が観測した観測結果を取得する。静止物体判定部220(停止物識別部)は、周辺物体観測装置811が相対位置を観測した物体が静止しているか否かを判定する。物体相関部230(停止物用追尾部)は、周辺物体観測装置811が観測した複数の相対位置のなかから、同一の物体について周辺物体観測装置811が観測した複数の相対位置を判定する。角速度推定部(状態推定部240、軌道推定部)は、移動体の角速度を推定する。
(もっと読む)
物体検知装置
【課題】物体を迅速かつ精度良く検知する。
【解決手段】物体検知装置10は、自車両の左前部および右前部に配置されて自車両の前方領域全体を1回で走査可能な広角の右レーダ11Rおよび左レーダ11Lと、処理装置12とを備える。処理装置12は、右レーダ11Rにより検出された反射点rRと左レーダ11Lにより検出された反射点rLとが同一の物体上に存在する場合に、反射点rR,rLの左右方向位置差分Δを算出し、この差分Δが所定の閾値Aよりも大きいか否かを判定する左右方向位置判定部23と、反射点rR,rLの左右方向位置差分Δの時間微分絶対値βが所定の閾値Bよりも大きいか否かを判定する時間微分絶対値判定部24と、反射点間距離の変化に基づいて前方領域を横切る物体が存在することを検知する物体検知部25とを備える。
(もっと読む)
物体検知装置
【課題】物体を迅速かつ精度良く検知する。
【解決手段】物体検知装置10は、自車両の左前部および右前部に配置されて自車両の前方領域全体を1回で走査可能な広角の右レーダ11Rおよび左レーダ11Lと、処理装置12とを備える。処理装置12は、右レーダ11Rにより検出された反射点rRと左レーダ11Lにより検出された反射点rLとが同一の物体上に存在する場合に、反射点rR,rLの間の反射点間距離と、自車両の前後方向における各反射点rR,rLまでの距離を算出し、反射点間距離と各反射点rR,rLまでの距離とに基づいて物体の幅を検知する物体検知部26を備える。
(もっと読む)
先行車検知装置
【課題】継続して存在する先行車が一時的に先行車と認識できなくなった場合に、その車両を先行車として早期に再認識することが可能な先行車検知装置の提供。
【解決手段】ECU5は、物体検知センサ2が今回検出した検出物体が前回よりも以前に検出された既検出の物体と同一であると推定した場合、その既検出の先行車の先行車適合情報を今回検出した物体の先行車適合情報として設定する引継ぎ処理を実行し、引き継がれた先行車適合情報に基づいて先行車の認定を行う。
(もっと読む)
先行車検出装置
【課題】2WS基準システムまたは4WS基準システムにおけるオフセット値に対して、さらに自車に適合する差分量を加算することによって、カーブ路における自車線上の先行車を精度よく検出できる先行車検出装置を提供する。
【解決手段】本発明の先行車検出装置は、自車の車両情報に基づいて当該自車が2WS車か4WS車かを判定する車両判定手段と、自車の前方にある物標の横位置情報を取得する横位置情報取得手段と、2WS車または4WS車に応じて横位置情報を自車のカーブ路における車体スリップ角が0度である直線走行方向基準の横位置情報に換算するオフセット値を算出するオフセット値算出手段と、オフセット値に基づいて横位置情報を直線走行方向基準の横位置情報に換算する直線走行方向基準換算手段と、直線走行方向基準の横位置情報に基づいて自車の前方にある物標が自車の前方にある先行車であるか否かを判定する先行車判定手段とを備える。
(もっと読む)
物体検知装置
【課題】物体を迅速かつ精度良く検知する。
【解決手段】物体検知装置10は、車両(自車両P)の左前部および右前部に配置されて車両(自車両P)の前方領域全体を1回で走査可能な広角の右レーダ11Rおよび左レーダ11Lと、処理装置12とを備える。右レーダ11Rは、車両(自車両P)から前後方向前方に所定距離だけ離れた位置に存在する所定の先行車両Qに対して、右レーダ11Rの検出領域ARの左端と先行車両Qの後部左端QLとが一致するようにして配置されている。また、左レーダ11Lは、車両(自車両P)から前後方向前方に所定距離だけ離れた位置に存在する所定の先行車両Qに対して、左レーダ11Lの検出領域ALの右端と先行車両Qの後部右端QRとが一致するようにして配置されている。
(もっと読む)
パルスレーダ装置
【課題】受信パルスの電力が微弱であっても妨害信号と本来の検出対象からの受信信号とを確実に識別し、レーダ計測精度の向上を図る。
【解決手段】送信アンテナ2から送信波を放射し、受信アンテナ3を介して受信回路23で取得した受信信号を信号変換部24で等価時間サンプリングしてアナログ信号からデジタル信号に変換し、受信波の波形データにノイズが含まれているか否かを信号判定処理部25で判定する。信号判定処理部25は、等価時間サンプリングした受信波の波形データの変化率の変動を算出し、変化率の変動が急峻な場合、妨害波による異常データが混入していると判断する。これにより、受信パルスの電力が微弱であっても妨害信号と本来の検出対象からの受信信号とを確実に識別し、レーダ計測精度の向上を図ることができる。
(もっと読む)
衝突予測装置
【課題】自車の前方に検出されたターゲットの自車に対する相対位置に応じて、当該ターゲットが自車の左側を通過するか、または右側を通過するかを予測し、自車とターゲットとの衝突可能性を適切に推定する衝突予測装置を提供する。
【解決手段】本発明の衝突予測装置は、自車の前方にターゲットを検出するターゲット検出手段と、ターゲットの自車に対する相対位置を算出する相対位置算出手段と、当該相対位置に基づいて、ターゲットが、自車の左側を通過するか、または右側を通過するかを示す通過予測情報を設定する通過予測情報設定手段と、相対位置の変化を監視する相対位置監視手段と、相対位置の変化に基づいて、通過予測情報設定手段によって設定された通過予測情報を変更する通過予測情報変更手段と、通過予測情報に基づいて、自車とターゲットとの衝突可能性を推定する衝突可能性推定手段とを備える。
(もっと読む)
先行車検出装置
【課題】従来に比して正確に先行車の位置を検出可能な先行車検出装置を提供する。
【解決手段】自車両の前方を走行する先行車の位置を検出する先行車検出装置であって、少なくとも先行車の左右方向の位置情報を検出する先行車位置検出手段と、現時点において検出した位置情報を補正するフィルタ補正手段と、先行車の走行状態を推定する先行車走行状態推定手段と、フィルタ補正手段による補正の度合いを、先行車走行状態推定手段によって推定された先行車の走行状態に応じて変更するフィルタ制御手段とを備える先行車検出装置である。
(もっと読む)
車両の周辺監視装置
【課題】レーダデータと赤外線カメラデータの同期ずれを補正する。
【解決手段】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、を備える車両周辺監視装置において、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して当該所定領域内の前記物体を特定する手段とを備え、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、を有する。
(もっと読む)
移動体認証システム
【課題】簡単な構成で信頼性の高い移動体認証システムを得る。
【解決手段】RFIDタグを認証対象とする認証装置を備えた移動体認証システムにおいて、認証装置1は、車両4の通過時に、認証装置1が車両4に向けて放射する電波で、車両4に取り付けられたRFIDタグ6を認証し、また、前記電波の移動体4での反射波で、認証装置1の近傍の非移動部に取り付けられたRFIDタグ7A及びBを認証することにより、移動体4が進入したことと、その種類を認証することができ、必要に応じて進入路のゲート3を操作する。
(もっと読む)
101 - 120 / 1,037
[ Back to top ]