
Fターム[5J070AE01]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 自動車 (1,037)
Fターム[5J070AE01]に分類される特許
121 - 140 / 1,037
障害物検出装置
【課題】低コストで障害物の存在方向を検出可能な障害物検出装置を提供する。
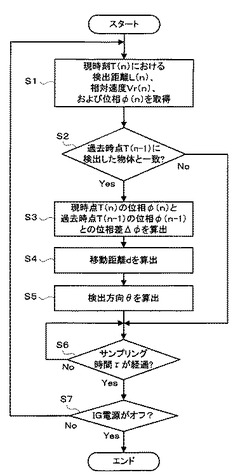
【解決手段】車両に搭載され、当該車両周囲の障害物を検出する障害物検出装置であって、車両の周辺に検出波を照射し、当該車両の周辺に存在する障害物から反射された反射波に基づいて当該障害物までの距離、当該物体と車両との相対速度、および当該反射波の位相を検出するレーダー装置と、異なる第1の時点、および第2の時点においてレーダーによって検出された障害物が同一であるか否かを、当該第1の時点および第2の時点各々において検出された距離および相対速度に基づいて判定する同一性判定手段と、第1の時点および第2の時点において検出された障害物の存在方向を、当該第1の時点および第2の時点各々において検出された位相に基づいて算出する方向算出手段とを備える、障害物検出装置である。
(もっと読む)
予測装置及び予測システム及びコンピュータプログラム及び予測方法

【課題】観測対象の将来の位置を高い精度で予測する。
【解決手段】観測装置810(位置観測装置)は、移動体(観測対象)の位置を観測する。ジャイロセンサ820(角速度観測装置)は、移動体の角速度を観測する。バイアス補正部141(角速度誤差推定装置)は、観測装置810が観測した位置に基づいて、ジャイロセンサ820が観測した角速度の誤差を推定する。バイアス補正部141(角速度補正装置)は、推定した誤差に基づいて、ジャイロセンサ820が観測した角速度を補正する。運動状態外挿部180(予測位置算出装置)は、バイアス補正部141が補正した角速度に基づいて、移動体の将来の位置を予測する。
(もっと読む)
障害物検出装置
【課題】低コストで障害物の存在方向を検出可能とする障害物検出装置を提供する。
【解決手段】車両に搭載され、当該車両周囲の障害物を検出する障害物検出装置であって、車両の周辺に検出波を照射し、当該車両の周辺に存在する障害物から反射された反射波に基づいて当該障害物までの距離を検出する距離検出手段と時刻t1において距離検出手段から取得した障害物までの距離を第1の距離とし、時刻t1から所定時間経過後の時刻t2おいて距離検出手段から取得した障害物までの距離を第2の距離として、当該第1の距離および当該第2の距離の差分値に基づいて当該障害物の存在方向を算出する方向算出手段とを備える障害物検出装置である。
(もっと読む)
障害物検出装置
【課題】低コストで障害物の存在方向を検出可能な障害物検出装置を提供する。
【解決手段】車両の周辺に周波数変調を施したシングルビームの検知波信号を照射し、当該検知波信号が障害物から反射されて成る反射波信号に応じたビート信号を取得するFM−CW方式のレーダー装置と、車両が所定距離移動する毎にレーダー装置において受信したビート信号を記憶する記憶手段と、記憶装置に記憶された反射波信号を、当該ビート信号を受信した各時点から現時点までの車両の移動距離に応じた位相だけ各々シフトさせる位相シフト手段と、位相シフト手段によりシフトされたビート信号を、複数のアンテナ素子において同時に受信した反射波信号とみなしてディジタルビームフォーミング処理することによって障害物の存在方向を算出するビーム合成手段とを備えることを特徴とする障害物検出装置である。
(もっと読む)
先行車位置判定装置
【課題】GPSによる相対距離および相対速度等の位置情報と、自律センサによる位置情報とを比較して先行車両を特定する際に、複数の他車両が存在する場合はGPSによる位置情報の誤差に応じて比較の閾値を変化させることで、より厳密に先行車を特定することができる先行車位置判定装置を提供することを課題とする。
【解決手段】ECUは、自車両と当該自車両前方を走行する他車両との相対位置に関する相対位置情報、および、当該相対位置の誤差に関する誤差情報を取得し、自車両の直前を走行する先行車の位置を検出し、取得された相対位置情報に基づく相対位置と、検出された位置とを比較して先行車の位置を特定し、複数の他車両の相対位置情報が取得された場合、取得された相対位置情報に基づく相対位置と、検出された位置とを、誤差情報に応じて変化させた閾値を用いて比較して先行車の位置を特定する。
(もっと読む)
目標類別装置
【課題】 類別するクラス(トラック、戦車、小型機 等)が増えるに従って類別処理が複雑化するため類別確率(類別結果が正しい確率)が低下する。
【解決手段】 目標が存在する地形の種類毎に当該地形に存在する目標の目標データを予め格納した参照データベースとを備える。目標の存在する地形に応じて、この参照データベース内の目標データを変更することで類別を行う。これにより、クラス(戦車、トラック、小型船 等)が増えても類別処理が複雑化することを避け、類別確率の低下を防ぐことができる。
(もっと読む)
レーダ装置及びコンピュータプログラム
【課題】側方対象物の誤検知を防ぐことができるレーダ装置を提供する。
【解決手段】電波を送信する送信アンテナ14と、送信された電波が対象物により反射された電波を受信する複数の受信アンテナ15と、受信アンテナ15で受信された各受信信号と送信アンテナ14で送信した送信信号とを混合して受信アンテナ15毎にビート信号を生成するビート信号生成部と、各ビート信号の信号強度に、受信アンテナ15毎に関係付けられた所定の重みをかけ、ビート信号の信号強度を変更する重み付け処理部17と、重み付け処理部17により信号強度が変更されたビート信号に基づいて、対象物の方位を検出する方位検出部19と、を備える。
(もっと読む)
車載レーダ装置
【課題】近距離の目標を検知でき、演算量を増やすことなく、遠距離の目標も検知できる車載レーダ装置を得る。
【解決手段】送信信号の周波数を三角波により周波数変調する周波数変調手段81と、周波数変調された送信信号をパルス化して送信パルスとして目標83に送信する送信手段82と、反射した信号を受信パルスとして受信し、周波数変調された送信信号の一部と受信パルスとの周波数差よりビート信号を生成する受信手段84と、送信パルスの送信タイミングを基にして、受信パルスのサンプリングタイミングを定めるレンジゲートを設定するレンジゲート設定手段88と、設定されたレンジゲート毎に、ビート信号をサンプリングするサンプリング手段85と、サンプリングされたビート信号に基づいて目標83までの距離と相対速度を算出する距離・相対速度算出手段86と、自車速に応じて送信パルス幅とレンジゲート幅を変更する制御手段87とを設けた。
(もっと読む)
検知装置および検知プログラム
【課題】定常的に存在している物体の近傍に位置する対象物の検知精度を向上する。
【解決手段】検知装置は、レーダを用いて移動可能な対象物を検知する。検知装置は、取得部、背景算出部、および、判定部を備える。取得部は、レーダが検知物体から受信した受信電力値を取得する。背景算出部は、繰り返し同じ位置に検知される検知物体を表す背景物体からレーダが受信する背景電力値の強度の分布を算出する。判定部は、受信電力値の強度の分布が背景電力値の強度の分布と異なる場合、レーダは対象物を検知したと判定する。
(もっと読む)
物体検出装置
【課題】物体の誤検知を抑制する。
【解決手段】物体検出装置10は、自車両からの所定角度範囲の検知領域を複数の垂直角度領域および水平角度領域に分割する。物体検出装置10は、複数の垂直角度領域毎に、複数の水平角度領域毎に向けて発信された電磁波に対応して検出された複数の反射点を、反射点の位置に基づき複数のセグメントに分類するセグメント生成部32と、所定位置範囲内に存在するセグメントからなり、かつ固有の物標を有する物標対象を生成する物標対象生成部33と、物体検出部37とを備える。物体検出部37は、物標対象生成部33によって生成された物標対象のうち、単一の垂直角度領域でのセグメントのみで構成された物標対象により物体を検知する。
(もっと読む)
走行車両台数計測装置及びプログラム
【課題】 1車線の道路上を走行した車両台数を正しく計測することが可能なドップラー方式の検出センサを用いた走行車両台数計測装置の提供。
【解決手段】 1車線上における任意の計測範囲内を走行中の車両に対し放射した送信波と、車両からの反射波との差分波を周波数分析することによって抽出される車両の速度と振幅値とを取得してそれらの時間変位を記録する。記録した車両速度と振幅値とに基づいて、前記計測範囲に車両が進入してから通過し終わるまでにかかる経過時間を確定し、当該確定した経過時間毎に車両台数をカウントする。すなわち、単に車両速度のみを用いて通過車両の台数をカウントするのではなく、車両速度に振幅値を組み合わせて用いて通過車両の台数をカウントする。これにより、計測範囲内における車両の移動態様を的確に把握して通過車両の台数をカウントすることが、ドップラー方式の検出センサを用いるだけでできるようになる。
(もっと読む)
レーダ装置及び周波数制御プログラム
【課題】ターゲットの未検知、誤検知を防ぐようにする。
【解決手段】レーダ装置10は、送信部1と受信部2と制御部3とを有する。送信部1は、所定周波数に設定した電波を出力する。受信部2は、アンテナ4により電波がターゲット5によって反射された反射波を受信する。制御部3は、受信部2によって受信された反射波に基づいて、所定範囲の受信レベルのターゲット5が存在することを検知した場合に、送信部1が出力する送信波の周波数を変更する。
(もっと読む)
車両検知装置および車両検知システム
【課題】レーダにより検知された車両が走行している車線を判別する。
【解決手段】車両検知装置は、複数の車線の各々に設置され、設置車線に隣接する車線を検知範囲に含むレーダからの情報を用いて車両を検知する。車両検知装置は、取得部、観測レーダ特定部、および、判定部を備える。取得部は、各レーダから、検知された対象物と対象物を検知したレーダの間の距離を表す検知距離、および、対象物の検知時刻を取得する。観測レーダ特定部は、第1のレーダにより検知された第1の対象物の検知距離と、第1のレーダの設置車線に隣接する車線に設置されている第2のレーダにより検出された第2の対象物の検知距離のうち、最も短い距離を観測した距離観測レーダを特定する。判定部は、第1の対象物と第2の対象物の間の距離が第1の閾値以下の場合に、距離観測レーダが設置されている車線を車両が走行していると判定する。
(もっと読む)
車両位置探索システム
【課題】車載機器遠隔制御システムの本来の機能に制限を加えることなく、新たなセンサの追加を必要とすることもなく、車両位置探索システムを提供する。
【解決手段】携帯装置10は、無指向性アンテナ17及び指向性アンテナ18を備える。携帯装置10は、ユーザ入力装置11から指示信号が送られたとき、無指向性アンテナ17を用いて第1の車両探索信号を車載装置20に送信し、指向性アンテナ18を用いて第2の車両探索信号を車載装置20に送信する。車載装置20は、第1の車両探索信号の相関値と、第2の車両探索信号の相関値とを取得し、第1の車両探索信号の相関値と第2の車両探索信号の相関値との差がしきい値Aより大きいか否かを判断し、判断結果を携帯装置10に送信する。携帯装置10は、送信された判断結果をユーザ通知装置14に出力する。
(もっと読む)
物標認識装置
【課題】レーダがオフセット搭載されている場合に、自車両に接近する物標が衝突しないと誤判断するのを防止して物標検出精度を向上する。
【解決手段】衝突判定回避処理部8により、自車両1と物標200との距離がレーダ5の水平方向の検知角と搭載位置のオフセット量とに基づいて設定された所定距離以内になったか否かを判定し、所定距離以内に物標200が接近したときに、物標200が近づくにつれて略自車両1の車幅に設定される衝突判定領域を前記検知角に応じてレーダ5の搭載位置側へ拡大修正する。
(もっと読む)
目標物速度特定装置、目標物速度特定プログラム及び目標物速度特定方法
【課題】アジマス圧縮後のSAR画像から高精度に目標物の速度を特定する。
【解決手段】目標物の複数の予測速度を入力する。SARと目標物との相対距離と、合成開口時間とに基づき計算されるアジマス圧縮用の参照関数を、入力された予測速度毎に生成する。特に、所定の場合には、予測速度に応じて合成開口時間の開始時刻と終了時刻とを変化させて参照関数を生成する。入力されたアジマス圧縮後のSAR画像を、一旦アジマス解凍して、アジマス圧縮前のデータに戻し、生成した各参照関数に基づき再びアジマス圧縮して画像を再生する。最も鮮明な画像を再生する際に使用した参照関数を特定し、特定した参照関数を生成する際に用いた予測速度を目標物の速度として特定する。
(もっと読む)
物体認識装置
【課題】車載レーダの反射の検出パターンから車両、モータバイク、自転車、人(歩行者)等を区別して認識する認識精度の向上を図ることができる技術を提供する。
【解決手段】複数フレームのレーザレーダ2による対象物体の反射の検出パターンを重ねてつなぎ合わせることにより、対象物体の輪郭を明りょうに示す合成検出パターンが生成されて、対象物体の形状を明りょうに示す合成検出パターンに基づく、対象物体の形状およびサイズ、自車両1と対象物体との相対位置や相対速度、対象物体の動きのベクトルなどの特徴から、パターン認識が行われて対象物体の種別が識別されるため、物体の形状の一部を示す検出パターンに基づいてパターン認識が行われるのに比べ、レーザレーダ2の反射の検出パターン30から車両、モータバイク、自転車、人(歩行者)等を区別して認識する認識精度の向上を図ることができる。
(もっと読む)
物体認識装置
【課題】車両と認識対象である物体との距離が変化しても、車載レーダの反射の検出パターンから車両、モータバイク、人(歩行者)等を区別して精度よく認識することができる技術を提供する。
【解決手段】探査対象となる物体とレーザレーダ2との距離に応じて変化するレーザレーダ2の反射の検出パターンが、距離ごとの特徴パターンとして物体の種類別に記憶部7に記憶されており、レーザレーダ2の反射の検出パターンと、記憶部7に記憶された特徴パターンとが認識処理部4により照合されて検出パターンの物体の種類が識別されるため、車両と認識対象である物体との距離が変化しても、レーザレーダ2の反射の検出パターンから車両、モータバイク、自転車、歩行者(人)等を区別して精度よく認識することができる。
(もっと読む)
反射型侵入監視装置
【課題】電子機器から発生するスイッチングノイズ等の影響を受けることなく、侵入者を確実に検知することができる反射型侵入監視装置を提供する。
【解決手段】送信部10は送信アンテナ21からマイクロ波を検知エリア20へ送信する。受信部30は検知エリア20に侵入した対象物22からの反射波を受信アンテナ23で受信し、周波数変換回路40にて受信信号frをローカル信号flo、ftと混合して中間周波数fifに変換する。周波数検波回路50は、中間周波数fifを中間周波信号IF2に変換して周波数検波する。AFC電圧生成回路54は、反転直流増幅器61で増幅された検波電圧bと予め設定したしきい値と比較し、検波電圧bがしきい値を超えない範囲では周波数検波部51内の周波数変換部の周波数制御を行い、検波電圧bがしきい値を超えると上記周波数変換部の周波数制御を停止する。
(もっと読む)
レーダーシステム及びその製造方法
送信アセンブリ(10)、受信アセンブリ(20)、制御部(30)及び信号処理部(40)を含むレーダーシステム(100)について述べる。送信アセンブリ(10)は、入力信号(31)を受信し、入射レーダー信号(2)を送信する。送信アセンブリ(10)は、レンズキャビティ(74)、複数のビームポート(60)、複数のアレイポート(62)及びパッチアンテナアセンブリ(14)を有するRotmanレンズ(12)を含む。レンズキャビティ(74)は、10ミクロン〜120ミクロン、好ましくは40ミクロン〜60ミクロンのレンズギャップ(h)を有する。パッチアンテナアセンブリ(14)は、Rotmanレンズ(12)から複数の時間遅延同相信号を受信し、入射レーダー信号(2)をターゲット(4)に向けて送信するように動作可能な複数のアンテナアレイ(130)を含む。受信アセンブリ(20)は、反射レーダー信号(6)を受け取り、出力信号を生成する。信号処理部(40)は、入力信号(31)を出力信号と比較し、ターゲット(4)のレンジ、速度及び位置を決定するアルゴリズムを実施する。 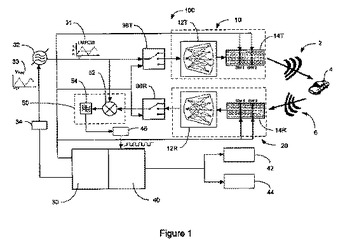 (もっと読む)
(もっと読む)
121 - 140 / 1,037
[ Back to top ]