
Fターム[5J070AE02]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 船舶 (172)
Fターム[5J070AE02]に分類される特許
101 - 120 / 172
レーダ装置およびアクティブターゲット装置
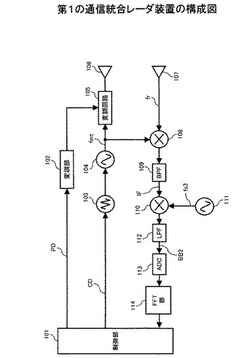
【課題】レーダ波を送信して目標物からの折り返し信号を受信し、各目標物との詳細な距離/速度を検出するとともに、目標物における無駄な電力消費を削減する。
【解決手段】制御部101は、無線通信機能の動作時に、目標物のアクティブターゲット装置を指定する局ID情報を含むパケットデータPDを出力し、変調回路105は、そのデータを発振器104からのレーダ波に乗せて送信する。アクティブターゲット装置は、自局の局ID情報を受信した場合に折り返し送信を起動し、ミキサ108は、レーダ機能の動作時に、送信レーダ波の一部と折り返し送信されたレーダ波を混合することにより、ビート信号を検出する。
(もっと読む)
目標追尾装置及び目標観測システム及び目標追尾方法及びプログラム

【課題】複数の目標が重なって一つの目標として観測されたのち重なった目標が離れて再び複数の目標として観測された場合でも、正しく目標を同定できる相関処理を実現する。
【解決手段】重複判定装置115は、複数の目標が重なって一つの目標として観測されたか否かを判定する。目標間距離算出装置121は、複数の目標が重なる直前に観測された位置の間の距離(重複前距離)を算出する。目標間距離ゲート設定装置131は、重複前距離に基づいて分離判定範囲を設定する。分離判定装置132は、分離判定範囲内に新たな目標が観測された場合に、重なった目標が離れて再び複数の目標として観測されたと判定する。分離妄評移動距離算出装置133は、分離目標移動距離を算出する。分離目標判定装置135は、分離目標移動距離に基づいて重なった目標が離れて観測された複数の目標を同定する。追尾装置150は、分離目標判定装置135が同定した目標を追尾する。
(もっと読む)
レーダ装置
【課題】長期に渡って良好に防水性能を保つことができるレーダ装置を提供すること。
【解決手段】回転輻射部12が筐体20に対して揺動自在に支持されるレーダ装置10において、回転輻射部12の回転軸の周りを囲むよう筐体20の上部に設けられるとともに、その外周面が回転輻射部12の回転軸の揺動中心Cを中心とする球面形状に形成された第1のカバー部材42と、第1のカバー部材42の上側および外周側を被覆するとともに、その内周面が回転輻射部12の回転軸の揺動中心Cを中心とする球面形状に形成された第2のカバー部材40と、を備えた。
(もっと読む)
レーダ装置
【課題】環境によって時々刻々と変化するノイズレベルの情報を生成し、生成した情報に基づいて受信感度調整や相関処理などの処理を行うレーダ装置を提供することを目的とする。
【解決手段】探索領域内に予め定めた分割領域毎にノイズ優勢領域か物標エコー優勢領域かの判定を行い、ノイズ優勢領域と判定された領域の受信信号を用いてノイズレベルを算出する。これにより、物標エコーとノイズとを分離するための適正な値を算出することが可能になる。また、ノイズ優勢領域で算出したノイズレベルを補間或いは外挿することによって他の領域のノイズレベルを算出する。これにより、レーダ探索領域全域にわたって適正なノイズ分布を得ることが可能になる。
(もっと読む)
レーダ装置および類似装置、画像表示方法
【課題】
探知レンジを変えた場合に、それまでに蓄積していた探知画像を変更後のレンジの縮尺に変換することによって、それまでに蓄積していた探知画像を消すことなく引き続いて新しい縮尺での表示が可能となるレーダ装置および類似装置を提供する。
【解決手段】
レンジ変更時の探知画像描画方法であって、探知画像をメモリに記憶し表示部に出力する工程と、画面上に表示する付加情報を記憶し前記付加情報を前記表示部に出力する工程と、記憶した前記探知画像からコンピュータの画像操作機能を用いてレンジ変更後の縮尺に適合するレンジ変更後画像を算出して記憶する工程と、記憶した前記付加情報から前記レンジ変更後の縮尺に適合するレンジ変更後付加情報を算出して記憶する工程とを備えることを特徴とする。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】ゲートが不必要に拡大するのを防ぎ、高速移動目標に対しても正確にゲート内に目標を捕捉できる目標追尾装置および目標追尾方法を得る。
【解決手段】本発明の追尾装置及び追尾方法は、北基準直交座標での目標運動における加速度ベクトルを駆動雑音とせずに、極座標での速度ベクトルのふらつきを駆動雑音としている。すなわち、平滑値ベクトルから速度ノルムと駆動雑音ベクトルの座標変換行列を算出し、その値と駆動雑音分散の設定値とから駆動雑音共分散行列を算出し、それを用いて追尾処理を行う。これにより、サンプリング間隔が大きい時にも、ゲートの極端な拡大を防ぐとともに、1サンプリング前の目標の速度成分を引用するゲート設定により、目標速度の大小に合わせた駆動雑音を設定し、目標速度に応じてゲートの広さを変化させ、最適なゲート設定を行うことが可能となる。
(もっと読む)
不要信号抑圧装置
【課題】目標のドップラー周波数が未知の場合でも、別の手段を用いることなく簡易に時空間適応信号処理によりクラッタを抑圧する不要信号抑圧装置を提供する。
【解決手段】不要信号抑圧装置は、移動体に搭載され、レーダの送信アンテナから空中に放射された高周波信号に係り且つ一直線上に等間隔に配置された複数個の素子アンテナ(1)により受信された反射信号に含まれる不要信号成分を抑圧する不要信号抑圧装置において、上記反射信号を受信する方向におけるクラッタのドップラー周波数を拘束から外すような拘束条件下で、上記高周波信号を搬送する搬送波の波長、上記素子アンテナの配置間隔、上記レーダが搭載された移動体の速さ、および上記高周波信号のパルス繰返し周期に基づいて、上記不要信号成分を抑圧する荷重係数を計算する荷重計算部(20)を備えた。
(もっと読む)
アンテナ装置
【課題】アンテナ自身を傾けることなく、ビーム指向方向を広帯域かつ非対称にすることが可能なアンテナ装置を得る。
【解決手段】誘電体基板1と、誘電体基板1にテーパスロット線路4を構成するために、誘電体基板1の中央線6に対して対称な関係を保つように、対向して誘電体基板1上に設けられた第1および第2の導体2,3と、第1の導体2と第2の導体3とで挟まれた領域として誘電体基板1上に構成され、線路幅が誘電体基板1の中央線6に対して対称な関係を保って漸次広がり、その先端が開放端であるテーパスロット線路4と、テーパスロット線路4の他端に設けられた給電点5に対して設けられ、給電点5に給電する給電手段とを備えたアンテナ装置であって、テーパスロット線路4を構成する第1および第2の導体2,3のどちらか一方に対して切り込み7を設けたことを特徴とする。
(もっと読む)
三次元センサのデータ補正装置及び方法
【課題】陸上に三次元センサを設置し、海面上の物体を検知・計測する場合に、基準平面を自動で補正でき、三次元センサをそれぞれ別の位置に設置し、複数の三次元センサを併用する場合に、各センサの座標系を共通のグローバル座標系に自動で調整できる三次元センサのデータ補正装置及び方法を提供する。
【解決手段】緯度・経度取得手段22、日時取得手段24、潮位計算手段26、および三次元座標補正手段28を備え、潮位計算手段26で算出した潮位を用いて三次元センサ10の座標データを補正する。また方位取得手段32、および三次元座標基準設定手段34を備え、緯度・経度、方位、水準面からの高さ、水準面からの傾き量(ピッチ、ロール)が把握できるため、グローバル座標系自身の三次元座標の基準を、グローバル座標系に合うよう自動設定する。
(もっと読む)
航法援助装置
【課題】部分拡大表示部の表示内容からも捕捉・追尾中の物標に関する情報を読み取れるようにし、また部分拡大表示部上での操作によっても捕捉・追尾対象とする物標またはターゲットマークを指定可能とする。
【解決手段】選択された物標またはターゲットについてターゲットマークMt1を通常倍率表示部Dnに表示するとともにターゲットマークMt2を部分拡大表示部Deに表示する。また、部分拡大表示部Deに複数の物標やターゲットマークが表示されている際、その部分拡大表示部De内で所望の物標またはターゲットマークを選択することによって選択物標を切り替える。
(もっと読む)
レーダ受信機
【課題】レーダ受信機の局部発振器の発振周波数可変範囲を狭くする。
【解決手段】受信したレーダ反射波を増幅し、局部発振器から出力するローカル周波数信号と混合して中間周波数信号を生成し、該中間周波数信号に基づき所定の受信処理を行うレーダ受信機において、前記局部発振器が、レーダ送信機のマイクロ波発振器と同じ温度環境に設置され、且つ前記マイクロ波発振器とほぼ同じ温度−発振周波数特性を有するようにする。例えば、前記局部発振器の同調素子として、前記局部発振器を構成する基板上に形成されたショートスタブを用いる。
(もっと読む)
レーダ装置および類似装置
【課題】この発明の目的は、自船近傍であっても航跡記憶・表示の禁止を必要な領域でのみ行い、それ以外の領域では、レーダ映像と航跡とを同時に記憶・表示することができるレーダ装置および類似装置を提供することにある。
【解決手段】スイープ毎に受信データXのレベルに基づいて物標の有無を示す航跡用データWを生成する航跡用データ生成手段と、前記受信データXのレベルに基づいて航跡記憶禁止領域を設定する航跡記憶禁止領域設定手段と、前記航跡記憶禁止領域外で且つ物標有りの航跡用データWを検出した場合にのみ所定レベルからなる航跡記憶用データYを生成する航跡記憶用データ生成手段と、前記航跡記憶用データYを前記スイープの少なくとも一回転毎に更新記憶した航跡画像データを生成する航跡画像データ生成手段と、前記航跡画像データを読み出して表示する表示手段と、を備えることを特徴とする。
(もっと読む)
運動諸元推定装置
【課題】複数のセンサが非同期に観測した場合においても目標の運動諸元を推定することができる運動諸元推定装置を提供する。
【解決手段】複数のセンサ対による異なる各時刻での観測結果から検出された各センサ対のセンサ間の目標との距離差及び速度差の観測値と、予め仮定した目標の運動方程式に従い基準時刻における目標の運動諸元の初期推定値に対し該基準時刻との時刻差を反映させて算出した各時刻での各センサ対のセンサ間の目標との距離差及び速度差の概略推定値と、の差分により目標の運動諸元の修正量を算出し、収束演算によって差分が収束するまで運動諸元を修正することで基準時刻における目標の運動諸元を推定する。
(もっと読む)
電波探知装置
【課題】同一種類のレーダ機器が複数種類の航空機や船舶に搭載されることが多いため、探知目標の情報と既知のプラットフォーム情報のみから搭載母体(プラットフォーム)を推定することは困難であった。
【解決手段】レーダ機器より発射された到来電波を分析し、この分析結果とレーダ波諸元ライブラリを比較照合してレーダ機器を推定するレーダ波電波諸元識別照合回路4と、同じ搭載母体の通信機器より発射された到来電波を分析し、この分析結果と通信波諸元ライブラリを比較照合して通信機器を推定する通信波電波諸元識別照合回路8と、推定したレーダ機器と通信機器の両方の情報をプラットフォームライブラリと照合するプラットフォーム識別回路10とを設け、プラットフォーム識別の確実性を向上させたものである。
(もっと読む)
レーダ装置
【課題】超遠距離目標探知時に余る信号処理のリソースを活用して、超遠距離目標に対する測角精度の向上を図る。
【解決手段】通常目標探知時よりも少ないパルスヒット数でペンシルビームの電波を送信する超遠距離目標探知時には、通常目標探知時に用いた複数の受信ビーム処理系をすべて用いてそれぞれ受信ビームを形成してそれぞれの測角情報および目標振幅情報を求め、相関処理部では、複数の受信ビーム処理系で得られた各測角情報の中からS/Nの最も高い受信ビームの測角情報を選択し、選択した測角情報について送信ビームと相関処理を行って最終的な測角値を求めるようにした。
(もっと読む)
アレーアンテナ及びそのビーム制御方法
【課題】低高度な目標に対しても大きい電力で電波を照射することができるアレーアンテナ及びそのビーム制御方法を得る。
【解決手段】送信信号を生成する送信器6と、前記送信信号を分配する分配器3と、分配器3の複数の出力に対して複素荷重をそれぞれ乗じる複数の乗算器2と、複数の乗算器2の出力をそれぞれ送信する複数の素子アンテナ1とが設けられたアレーアンテナであって、推定される目標位置に基づいて目標方向を推定する目標方向推定手段7と、前記目標位置に到達するマルチパス波の送信方向であるマルチパス方向を推定するマルチパス方向推定手段8と、前記マルチパス波が反射する角度から前記マルチパス波の反射係数を推定する反射係数推定手段10と、前記目標方向、マルチパス方向及び反射係数に基づいて複数の乗算器2で乗算する複素荷重を算出する荷重計算手段5とをさらに設けた。
(もっと読む)
レーダ装置
【課題】レーダ装置の覆域を拡充すると装置規模が拡大する問題が発生していた。
【解決手段】空中線から送信信号を放射し目標からの反射波を受信処理して目標検出を行うレーダ装置において、目標検出器8で目標が検出されるまでは、仰角ビーム制御器5と方位ビーム制御器6とレンジビン制御器9を広仰角ビーム、広方位ビーム、粗いレンジビンに制御することで誤警報確率を緩和し、最小探知S/Nを緩和させることによって、尖頭送信電力を抑えレーダ装置規模を縮小する。目標検出器8が目標を検出した際は、仰角ビーム制御器5と方位ビーム制御器6とレンジビン制御器9を狭仰角ビーム、狭方位ビーム、細かいレンジビンに制御して、再度目標検出することにより、分解能を向上して目標に対し精確に位置を特定する
(もっと読む)
レーダ追跡装置及びその方法
追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数部、及び追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基に、α及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新するフィルタ利得更新部を具備するα−β追跡フィルタを有するレーダ追跡装置である。 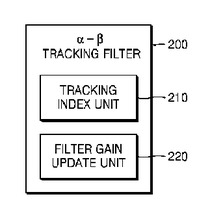 (もっと読む)
(もっと読む)
追尾方法及びその装置
【課題】 加速度運動を行う目標を精度よく追尾する追尾方法を得る。
【解決手段】 第1の時間の平滑誤差共分散行列から第2の時間の予測誤差共分散行列を算出し、第2の時間の予測誤差共分散行列と第2の時間のゲイン行列と所定の観測雑音共分散行列とに基づいて第2の時間の平滑誤差共分散行列を算出し、第2の時間の予測誤差共分散行列と観測雑音共分散行列から、第2の時間の予測値ベクトルに含まれる目標の位置についてのゲインである位置ゲインと第2の時間の予測値ベクトルに含まれる目標の速度についてのゲインである速度ゲインとを含む第2の時間のゲイン行列を算出し、第2の時間の観測値を取得し、取得した観測値と第2の時間の予測値ベクトルと第2の時間のゲイン行列とに基づいて第2の時間の平滑値ベクトルを算出する追尾方法において、速度ゲインとして固定値のゲインを含む第2の時間のゲイン行列を算出する。
(もっと読む)
乗物または設備のための操舵および安全システム
乗物または設備のユーザが、乗物または設備の周囲状況および乗物または設備自体に関する高度でかつ最新の情報を取得することを可能にするための、乗物用システムが提供される。このシステムは、海洋船の上に位置してもよく、また、船上と船外の両方に位置する多数の異なる情報源からの情報を統合する。それらの情報は、船舶上の高度なレーダーおよびソナーサブシステムからの情報、従来の機器およびセンサからの情報、ならびに陸上のコントロールセンターからアクセスされる陸上および海上設備およびEO衛星からの情報を含む。このシステムは、利用可能である場合、通信衛星および/または無線インターネットによってコントロールセンターと通信してもよい。データを処理し、提示するためのデータ処理装置もまた提供される。データは、空間内において3次元で受信され、処理され、提示され、時間がデータに対して4つめの次元を提供するように、リアルタイムまたはほぼリアルタイムに更新される。データを提示するためのグラフィカルユーザインターフェースも提供される。このグラフィカルユーザインターフェースは、エンドユーザ自身の観測結果が提示されたデータに一致しない場合、システムにおいてエラーを報告するための機能を提供する。さらに、2つ以上の船舶を含むデータを収集するシステム、コントロールセンター、ならびに、船舶およびコントロールセンターが通信する手段が提供される。このシステムは、収集されたデータを記憶するカタログおよび記憶ネットワークを備える。すべてのデータは、データの関連する品質尺度と共に記憶される。  (もっと読む)
(もっと読む)
101 - 120 / 172
[ Back to top ]