
Fターム[5J070AE02]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 船舶 (172)
Fターム[5J070AE02]に分類される特許
1 - 20 / 172
レーダ通信装置
【課題】空中線が回転している他船の船舶と、データ通信可能なレーダ通信装置を提供する。
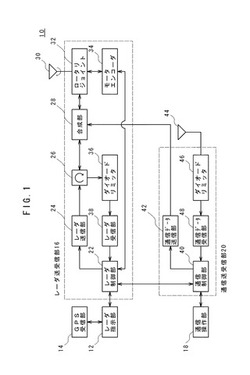
【解決手段】レーダ通信装置10は、レーダ波の送受信を行うレーダ送受信部16と、通信データの送受信を行う通信送受信部20とを備え、前記通信データを前記レーダ波に合成して送受信することにより空中線が回転する他船と通信するレーダ通信装置であって、前記通信データを受信し、受信した前記通信データを通信送受信部20に供給する通信用空中線44を有する。レーダ送受信部16は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線30より送信し、通信用空中線44は、無指向性である。
(もっと読む)
レーダ通信装置

【課題】空中線が回転駆動して他船の船舶に対して、通信データを送信することが可能なレーダ通信装置を提供する。
【解決手段】
レーダ通信装置10は、レーダ波の送受信を行うレーダ送受信部14と、通信データの送受信を行う通信送受信部18とを備え、通信データをレーダ波に合成して送受信することにより空中線が回転する他船と通信する装置であって、自船の空中線を回転駆動するモータを制御するモータ制御部52と、他船の真方位θtを取得し、他船の空中線の回転周期Tを算出し、自船の空中線θsが他船の空中線に対して正対するときの時刻である正対時刻tを算出するレーダ制御部12と、を有し、モータ制御部52は、自船の空中線を、レーダ制御部26によって算出された正対時刻tまでに、他船の真方位θtに自船の空中線の真方位θsが一致する位置に待機させ、通信送受信部16は、他船と通信する。
(もっと読む)
船舶の統合監視のための衛星情報及び船舶情報の統合方法
【課題】本発明は、船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
【解決手段】より具体的には、合成開口レーダ(Synthetic Aperture Radar、SAR)から送信される船舶についての情報である衛星情報と、各船舶に搭載された船舶自動識別装置(Automatic Identification System、AIS)から送信される船舶情報とを統合して、前記船舶自動識別装置を搭載し、識別が可能な確認船舶および前記船舶自動識別装置が搭載されていない未確認の船舶をすべて監視することが可能な船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
(もっと読む)
レーダ装置、および、物体導出方法
【課題】レーダ装置の部品点数の増加を防止し、発熱を抑制する技術を提供する。
【解決手段】
所定周期の第1送信波および第2送信波と、第1送信波が物体に反射した第1反射および第2送信波が物体に反射した第2反射波とに基づき、一の信号処理周期で物体に係る検知点を導出する。そして、所定条件を満たした場合に、所定周期よりも長い特定周期に変更した第1送信波、および、第1反射波に基づき一の信号処理周期で検知点を導出し、特定周期に変更した第2送信波、および、第2反射波に基づき、次の信号処理周期で検知点を導出する。これにより、物体の角度の導出処理をほとんど遅延させることなく、レーダ装置の発熱を抑制できる。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】本発明は、目標物が存在する可能性のある区域を精度よく推定する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲を一定の区域からなるメッシュに区切り、管理するメッシュ管理部と、探知した目標物の情報を有する探知情報を用いて、目標物の存在するメッシュを決定し、時間経過に応じて目標物の存在する目標存在メッシュを推定する目標推定部と、目標物と新たに入力された探知情報に含まれる目標物が同一であるかを判定し、目標存在メッシュを更新する同一化判定部と、目標物がない地域を示す否定情報を受信すると、地域に対応する目標物がないメッシュを前記目標存在メッシュに反映し、反映した目標存在メッシュを更新する反映部と、を備えることを特徴とする目標管理装置である。
(もっと読む)
レーダ基準方位補正装置、レーダ装置、レーダ基準方位補正プログラム、及びレーダ基準方位補正方法
【課題】レーダ装置の探知方向の基準である基準方位を高精度に補正するレーダ基準方位補正装置を提供する。
【解決手段】レーダ基準方位補正装置は、相対位置取得部と、絶対位置取得部と、演算部と、補正部と、を備える。相対位置取得部は、レーダ装置(レーダアンテナ)に対する物標の相対位置を取得する。絶対位置取得部は、レーダ装置の絶対位置及び物標の絶対位置を取得する。演算部は、相対位置に基づく、レーダ装置に対する物標の方向と、絶対位置に基づく、レーダ装置に対する物標の方向と、の差である誤差角を求める。補正部は、演算部が求めた誤差角に基づいて、基準方位を補正する。
(もっと読む)
船舶用航行支援装置
【課題】衝突の危険性があるとの認識を共有することにより、衝突の危険を回避する行動を適切に行えるようになる船舶用航行支援装置を提供する。
【解決手段】AIS装置4が、GPS情報から自船の位置、針路、速度を測定し、測定された自船の位置、針路、速度を含むAIS情報をAISアンテナ2から送信させる。また、μCOM5は、自船のAIS情報とAISアンテナ2が受信した他船のAIS情報から自船及び他船の衝突確率を算出し、閾値以上のときにその旨を警報すると共に、その旨を示す警報信号をAISアンテナ2から他船に送信させる。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】目標物の誤検出を抑止するとともに、センサの数を抑えて目標物の数を効率よく管理する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲に対応する地図情報の2つ以上の座標により表される複数の経路と、経路が接続する点を表す分岐点とを関連付け、センサ各々が探知した1つ以上の目標物の座標を、複数の経路のいずれかに関連付ける分配部と、1回目の走査時に探知した分岐点に関連付けられている経路各々の目標物の数と、2回目の走査時に探知した経路各々の目標物の数とを用いて、経路各々の目標物の数の増減値を算出し、経路各々の目標物の数の増減値から分岐点ごとに、経路各々に関連付けられている目標物の数の増加数または減少数を求める増減算出部と、増加数または減少数を、前回更新部で求めた経路の目標物の数に加えて今回の該経路の目標物の数とする更新部と、を備える目標物管理装置である。
(もっと読む)
レーダ装置及び目標位置算出方法
【課題】レーダ装置により算出される目標位置観測値のバタつきを抑制し、目標追尾処理を安定化させること。
【解決手段】本発明に係るレーダ装置(1)は、データ生成部(30)と、目標検出部(42)と、目標距離算出部(43)とを備える。データ生成部(30)は、追尾目標から受信した反射波に関するデータ(DA)を、レンジビン毎に生成する。目標検出部(42)は、距離ゲート(RG)内においてデータ(DA)が閾値レベル(TH)以上であるレンジビンの集合、あるいは、レンジビンの集合に振幅レベルが閾値レベル(TH)未満であるレンジビンがあるものの当該レンジビンの数や幅(隣接レンジビンの振幅レベルが閾値レベル(TH)未満であるレンジビンの数)が規定を満足しており集合と認められるものを、追尾目標に対応する目標レンジビン集合(TBG)として抽出する。目標距離算出部(43)は、目標レンジビン集合(TBG)に属する全レンジビンが示すそれぞれの距離の平均値を、追尾目標への距離である目標距離(R)として算出する。
(もっと読む)
妨害信号除去装置、レーダ装置、及び妨害信号除去方法
【課題】他のレーダ装置からの干渉信号を十分に除去可能な妨害信号除去装置を提供する。
【解決手段】パルス圧縮レーダ装置は、妨害信号除去装置と、アンテナと、受信信号処理部と、映像表示部と、を備える。また、妨害信号除去装置は、送信トリガ生成部と、送信周波数設定部と、を備える。送信周波数設定部は、無変調パルス信号P2と、互いに異なる帯域を有する変調パルス信号P0,P1と、に帯域を設定する。アンテナは、無変調パルス信号P2及び変調パルス信号P0,P1を送信するとともに、物標からの反射による受信信号を受信する。受信信号処理部は、アンテナが受信した受信信号に基づいて、自船周辺の物標の位置を示すレーダ映像を生成する。映像表示部は、このレーダ映像を外部の表示器に表示する。
(もっと読む)
指示支援装置
【課題】本発明は、目標から到来した反射波で示される画像の分解能の向上を図る高分解能処理の対象を設定する指示支援装置に関し、構成が大幅に複雑化することなく高分解能処理の処理量を削減できることを目的とする。
【解決手段】到来した反射波で示される画像の内、前記画像に含まれる見かけ上の目標が位置する領域もしくは部位を抽出する抽出手段と、前記領域または前記部位を分解能の向上を図る高分解能処理の対象とする制御手段とを備える。
(もっと読む)
指示支援装置
【課題】本発明は、近接した複数の目標から到来した反射波、またはその反射波が示す画像を処理することにより、これらの複数の目標の区分を図る指示支援装置に関し、近接した複数の目標の寸法ならびに相対的な配置に柔軟に適応し、これらの目標の区分のために要する処理量を安定に削減できることを目的とする。
【解決手段】到来した反射波と前記反射波が示す画像との何れかで示される複数mの目標について、個別の区分の可能性を判別する判別手段と、前記可能性が所定の閾値以下であるときに高分解能アルゴリズムに基づいて、前記可能性が前記所定の閾値を超えるときに前記高分解能アルゴリズムより所要する処理量が少ない簡易アルゴリズムに基づいて、それぞれ前記反射波または前記画像を処理することにより前記複数mの目標を区分する適応処理手段とを備える。
(もっと読む)
レンジサイドローブ除去装置、信号処理装置、同信号処理装置を備えたレーダ装置、レンジサイドローブ除去方法及びプログラム
【課題】レンジサイドローブによる偽像を低減し、物標を確実に検出する。
【解決手段】レーダ装置1において、レンジサイドローブ除去装置36は、レーダーアンテナ10からの受信信号を取得し、パルス圧縮処理を行ってパルス圧縮信号を生成するパルス圧縮部33と、受信信号から、パルス圧縮信号のレンジサイドローブの擬似信号を生成する擬似レンジサイドローブ生成部34と、パルス圧縮信号から擬似信号に相当する成分を除去する信号除去部35と、を備える。
(もっと読む)
物標を探知して表示する装置
【課題】海面反射領域を適切に自動検出して、海面反射領域内と海面反射領域外とでそれぞれに応じた異なるスキャン相関処理を自動選択して実行する。
【解決手段】海面反射領域検出部10は、エコーデータに準じて、当該エコーデータに対応する画素が不安定画素であるかどうかを検出する。海面反射領域検出部10は、不安定画素に対して、時間的な不安定状態の延長、および平面的な不安定画素の領域の拡大を行った後に、海面反射領域を決定する。連続性検出部9は、エコーデータに対応する画素の平面的連続性を検出する。Wデータ発生部6は、海面反射領域の内外、連続性の有無に基づいて設定される複数種類の係数からなるスキャン相関処理演算を用いて、今回のエコーデータと画像メモリ7に記憶された前回のスキャン相関処理結果データとから今回のスキャン相関処理結果データを算出し、画像メモリ7へ更新記憶させる。
(もっと読む)
センサ統合システム及びセンサ統合方法
【課題】複数種類のセンサによる観測データを組み合わせて、目標物の高精度な移動軌跡を抽出する。
【解決手段】プロセッサと、前記プロセッサに接続される記憶装置と、前記プロセッサに接続される出力装置と、を備えるセンサ統合システムであって、前記記憶装置は、複数のセンサによって観測された観測データを保持し、前記観測データはあらかじめ規定された項目のうち選択的に記述された項目を含み、前記プロセッサは複数の前記観測データの選択記述された前記項目を組み合わせ、一つ以上の目標物の移動軌跡を推定し、前記出力装置は、前記移動軌跡を示す情報を出力する。
(もっと読む)
物標運動推定装置
【課題】自機の運動状態の変化を受けにくい運動推定結果を出力可能な物標運動推定装置を提供する。
【解決手段】レーダ装置が備える物標運動推定部6は、物標相対座標取得部61と、固定点基準物標座標取得部62と、フィルタ処理部64と、を備える。物標相対座標取得部61は、船舶に搭載され、自船を基準とした物標の相対位置を示す相対座標(Trx,Try)をレーダエコーに基づいて取得する。固定点基準物標座標取得部62は、相対座標(Trx,Try)と、自船の位置と、に基づき、固定点を基準とした物標の位置を示す固定点基準座標(Tax,Tay)を取得する。フィルタ処理部64は、固定点基準座標(Tax,Tay)を入力して物標の運動情報を推定する。
(もっと読む)
周波数検出装置及び周波数検出方法
【課題】無線信号の搬送周波数の検出において瞬時的な雑音や不要波成分による誤検出を低減する。
【解決手段】周波数検出装置1は、パルス信号を送信する送信部6と、信号を受信する受信部9と、送信部6により送信され物体70で反射して受信部9により受信されたパルス信号を追跡することによりパルス信号の反射時間を検出する検出部11と、反射時間が所定範囲内であるか否かを判定し、反射時間が所定範囲内でない場合にパルス信号の搬送周波数を検出対象の搬送周波数と判定する判定部12を備える。
(もっと読む)
レーダ信号処理装置およびレーダ画像処理装置
【課題】本発明は、レーダ装置において、目標から到来した無線信号にその目標に所定の信号処理を施すレーダ信号処理装置と、目標の指示に必要な画像情報を生成するレーダ画像処理装置とに関し、目標の姿勢、移動方向、距離および方位の如何にかかわらず、その目標が地理的または物理的に占有する領域の識別を精度よく安定に実現できることを目的とする。
【解決手段】照射された送信波に対する応答として無線信号を放射しまたは反射する目標の姿勢または移動方向を示す参照情報を外部から取得し、前記無線信号の受信に供される空中線系と前記空中線系に対する既定の方向とを基準として前記参照情報を評価する目標評価手段と、前記目標の距離および方位の下で前記参照情報の評価の結果を前記目標が占有する領域として識別する目標識別手段とを備える。
(もっと読む)
識別装置
【課題】目標の識別精度を高くする。
【解決手段】実施形態の識別装置は、選択部、学習部、入力受付部、特徴抽出部、特徴量計算部、類似度計算部、識別部、及び出力制御部、を備える。選択部は、各学習サンプルが複数のカテゴリのいずれかに分類される複数の学習サンプルから学習サンプルを1以上含むグループを複数選択する選択処理を複数回行う。学習部は、選択された複数のグループ毎に当該複数のグループを識別する識別基準を学習し、複数の識別基準を含む評価基準を生成する。入力受付部は、目標からのレーダエコーに基づく画像の入力を受け付ける。特徴抽出部は、画像から目標の輪郭形状の特徴を表現する特徴ベクトルを抽出する。特徴量計算部は、評価基準を用いて特徴ベクトルの特徴量を計算する。類似度計算部は、特徴量と識別特徴量の類似度を計算する。識別部は、類似度を用いて目標を識別する。出力制御部は、識別結果を出力部に出力させる。
(もっと読む)
レーダ装置
【課題】航空機と船舶等、速度が大きく異なる目標を同時に監視する際に、自動追尾開始時における誤追尾による目標表示を抑制したレーダ装置を得る。
【解決手段】追尾演算部17でのスライディングウィンドウ処理中に行われる、今回のスキャンと直前のスキャンとでの目標の相関の有無の判定において、相関有りと判定された回数をスキャンの進行に沿ってカウントアップし、このカウント値を相関・連結成功回数として、目標の表示用の追尾情報としての目標レポートに含めて操作表示部18に送出する。一方、複数の操作表示部18a〜18cにおいては、この相関・連結成功回数に対して、監視対象に合わせた最適なしきい値kdspがそれぞれに設定されており、受けとった目標レポートの中から、このしきい値kdspを超えた相関・連結成功回数を有するものを表示対象の目標レポートとして選択し、その目標を画面上にシンボル表示する。
(もっと読む)
1 - 20 / 172
[ Back to top ]