
Fターム[5J070AE06]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | ミサイル又は弾丸 (75)
Fターム[5J070AE06]に分類される特許
1 - 20 / 75
追尾アンテナ装置の調整方法、及び追尾アンテナ装置
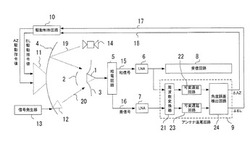
【課題】モノパルス追尾では、受信信号から生成した和信号と差信号を用いて方位角および仰角誤差を検出するが、和信号と差信号の群遅延差により誤りが生じる。この誤りを避けるためアンテナ追尾回路を校正する必要があるが、校正信号として連続波などの狭帯域な信号を用いた場合、位相の不定性により群遅延の補正に問題が生じる。
【解決手段】追尾アンテナの主反射鏡4上の仰角軸上の既知の位置に調整用アンテナ12を設置し、PSK変調波の調整用信号20を放射する。この時、調整用信号20とアンテナ指向方向の方位角は一致するため方位角誤差信号が0となるはずであり、アンテナ追尾回路の校正では和信号15と差信号16の群遅延差を可変遅延回路22、23で補正することでこれを0に調整する。
(もっと読む)
弾着観測装置

【課題】 従来の弾着観測装置は、追尾目標に対するビームの受信信号から水柱を検出し、弾着位置として観測していたが、弾丸が目標の近くに弾着した場合や波が荒れている場合、水柱が目標の陰に隠れてしまう場合等、水柱の検出が困難な状況では弾着位置を観測できず、追尾目標と弾着位置との誤差を出力できないことが課題であった。
【解決手段】 弾丸に対しビームを照射した受信信号から検出される弾丸の観測値をもとに弾丸の弾道を算出し、その高度が0となるときを弾着位置として算出するとともに、弾丸が水面に着弾したときに発生する水柱から弾着位置を算出する。
(もっと読む)
管制装置、航空機、及び管制方法
【課題】目標に対する射撃を行うための火器管制を効率良く行うことを目的とする。
【解決手段】航空機10は、データリンク装置24によって、僚機10Bから僚機10Bの移動情報及び僚機10Bが捜索追尾によって取得した目標情報を受信し、自機の移動情報及び自機が捜索追尾によって取得した目標情報を僚機10Bへ送信する。そして、航空機10は、目標割当部54によって、データリンク装置24で受信した僚機10Bの移動情報及び目標情報、並びに自機の移動情報及び自機の捜索追尾によって取得した目標情報に基づいて、自機及び僚機10Bに対して、射撃の対象となる目標機12又は捜索追尾の対象となる目標機12を割り当てる割当処理を行い、割当結果である目標割当指示を僚機10Bへデータリンク装置24によって送信する。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、目標とクラッタをドップラ周波数で分離し、狭帯域フィルタを通過した目標の電力で利得制御を行っていたため、電力が大きいクラッタを受信した時に、受信系が飽和するという問題があった。
【解決手段】 受信系の初段に阻止帯域の異なる複数のノッチフィルタを備え、外部に備えた速度センサ及び姿勢角センサからの情報をもとにクラッタ周波数を計算し、適合する阻止帯域のノッチフィルタを選択する。選択したノッチフィルタは、受信した目標信号のみ通過させ、クラッタを減衰させる。これにより、クラッタにより受信系が飽和する問題を解消する。なお、受信系の初段にフィルタを配置すると、NFが劣化し、低S/Nの目標の検出が困難になる問題があるため、高度が低くクラッタ電力が大きい時のみ、ノッチフィルタを通過させるよう、切換えを行う。
(もっと読む)
レーダ装置、飛翔体誘導装置及び目標検出方法
【課題】ステップ周波数合成帯域レーダのレンジ分解能、複数目標分離性能を損なわずに1パルスをチャープパルスとした合成帯域レーダを実現し、かつ目標の検出を安定して行えるようにした。
【解決手段】FFT部6、圧縮係数乗算部7及びIFFT部8−1にてパルス圧縮を施し、代表値抽出部11−1にて得られたパルス代表値を再変換部12により再度フーリエ変換し、加算部13にてこのフーリエ変換出力を圧縮係数乗算部7の出力から減算し、この減算出力をIFFT部8−2にて逆フーリエ変換して再度パルス圧縮を施して、ピーク検出部9−2及び代表値抽出部11−2によりパルス圧縮後波形のピーク毎のパルス圧縮レンジを検出するようにして、パルス圧縮・代表値抽出部14におけるパルス代表値の演算を二重に行うようにしている。
(もっと読む)
レーダ装置、飛翔体誘導装置及び目標検出方法
【課題】ステップ周波数合成帯域レーダのレンジ分解能、複数目標分離性能を損なわずに1パルスをチャープパルスとした合成帯域レーダを実現する。
【解決手段】目標から到来しアンテナ2で受信したチャープパルスをパルス毎にFFT部6にてフーリエ変換し、圧縮係数乗算部7にて圧縮係数を乗算し、補間IFFT部8にてパルス圧縮係数乗算後のスペクトルサンプルの外側に複数のゼロ点を付加して逆フーリエ変換処理を実行するようにしている。
(もっと読む)
レーダ装置及びレーダ信号処理方法
【課題】 妨害除去処理に際してメインローブに与える影響を低減する。
【解決手段】 アレーアンテナ部10は、レーダ信号を受信する。レーダ制御部70は、アレーアンテナ部10によるレーダ信号の受信を妨害する妨害電波の方向を特定する。ビーム形成部40は、アレーアンテナ部10によって受信されたレーダ信号から、所望の受信ビームを形成し、レーダ制御部70によって特定された方向に妨害除去のためのSLCビームを形成する。SLC処理部50は、ビーム形成部40によって形成されたSLCビームを用いて、受信ビームから妨害電波の影響を除去する。
(もっと読む)
自動追尾レーダ装置および自動追尾方法
【課題】雑音帯域幅の狭い追尾ループでの追尾を可能とし、追尾限界となるS/N比を改善することが可能な自動追尾レーダ装置を提供する。
【解決手段】ロケットやスペースデブリ等の飛翔体を自動追尾する自動追尾レーダ装置として、前記飛翔体を初期捕捉して、自動追尾モードに移行した以降において、アンテナ指向追尾系ループのアンテナ指向誤差検出器16、積分器17および距離追尾系ループの距離誤差検出器23、積分器24にて検出されたアンテナ指向誤差および距離誤差に基づき、アンテナ追尾ループフィルタ18および距離追尾ループフィルタ25それぞれにて生成されるアンテナ指向角度の制御情報および受信タイミングの制御情報を、予見情報(角速度、各加速度)加算器27および予見情報(速度、加速度)加算器26にて、前記飛翔体の軌道予測値、他のレーダ装置の追跡情報または過去の追跡データに基づく予測値である予見情報を用いてさらに補正する。
(もっと読む)
飛翔体探知方法及びシステムならびにプログラム
【課題】飛翔体の3次元位置を特定する飛翔体探知方法等を提供する。
【解決手段】地上を飛翔する飛翔体を撮影可能な観測器及び撮影画像を送信する送信器を備えた少なくとも2機の人工衛星と、送信された少なくとも2枚の画像データを受信するためのアンテナとアンテナにより受信した少なくとも2枚の画像データを解析して飛翔体の位置を解析する位置解析装置とを備えた基地局とで構成される飛翔体探知システムであって、位置解析装置は、各々の人工衛星の頂角及び方位角を算出する算出部と、これら頂角及び方位角から観測ベクトルを生成する観測ベクトル生成部と、各々の人工衛星の位置情報、速度情報等に基づいて座標変換行列を生成する座標変換行列生成部と、飛翔体位置初期値と座標変換行列とから係数を生成する係数生成部と、これら係数と観測ベクトルとから定められるパラメータ推定処理を実行するパラメータ推定処理部とを備えたことを特徴とする。
(もっと読む)
目標追尾処理器及びそれに用いる誤差共分散行列の補正方法
【課題】 観測値の入力頻度が低下した場合、または観測値の入力が無くなった場合においても、誤差共分散が過度に大きくなったり、異常な値となったりすることを防止することが可能な目標追尾処理器を提供する。
【解決手段】 目標追尾処理器は、目標の位置を観測するセンサの観測値からその目標の位置、速度及び針路を状態変数として推定するカルマンフィルタを用いた目標追尾を行う。また、目標追尾処理器は、状態変数の分散を表す誤差共分散を補正する手段(ダミー作成起動部20、ダミー観測時刻作成部21、ダミー観測値作成部22)を有する。
(もっと読む)
レーダ装置
【課題】クロスレンジプロフィールを用いた類別判定において、目標の観測条件(距離、速度、進行方向)によってクロスレンジ分解能が変化することにより、類別判定結果の信頼性が大きく変化するという運用上の課題がある。
【解決手段】追尾情報から得られた目標の観測条件と、所望のクロスレンジ分解能から、所望のクロスレンジ分解能を得るために必要となる目標観測時間を算出し、これに基づき捜索ビーム及び類別ビームのビームスケジューリングを行う。
所望のクロスレンジ分解能を得るために更に長い目標観測時間が必要な場合は、類別ビームを分割送信することによりクロスレンジ分解能を向上させ、目標の観測条件によらずクロスレンジ分解能を一定にすることにより、類別判定結果の信頼性を一定に保つ。
(もっと読む)
避退指示装置
【課題】 従来、航空機等の移動体に対して、目標物や目標物に向けて発射される飛しょう体からの避退を指示する場合、オペレータの判断により手動で避退指示を与えていたため、指示タイミングが遅れる、また最適な避退針路でない恐れがあった。
【解決手段】 飛しょう体情報記憶部より読み込む飛しょう体の発射位置及び発射速度と目標情報記憶部より読み込む目標の位置と速度と針路とに基づき飛しょう体を目標に会合させる針路を算出する飛しょう体針路算出部と、目標の針路及び求めた飛しょう体の針路と移動体情報記憶部より読み込む移動体の位置とに基づき避退する移動体を判定する避退対象判定部と、避退対象の移動体の位置及び速度と飛しょう体の針路及び目標の針路とに基づき移動体の避退針路を算出する避退針路算出部と、避退針路算出部より出力される避退針路を移動体に指示する避退指示部と、を備える避退指示装置である。
(もっと読む)
ポラリメトリSAR装置及びポラリメトリSARデータを用いる目標物同定方法
【課題】地物の向き及び撮像方向による影響を軽減させながら、撮像された地物を任意の形状のものと定量的に同定する。
【解決手段】提供されるポラリメトリSAR装置は、第1の基底変換処理部19が撮像された地物のフルポラリメトリデータに基づいて第1のフルポラリメトリ複素画像を算出し、第2の基底変換処理部20が既知の地物のフルポラリメトリデータに基づいて第2のフルポラリメトリ複素画像を算出する。強度変換処理部23とフィルタ処理部27を経由した第1のフルポラリメトリ複素画像と、強度変換処理部24とフィルタ処理部28を経由した第2のフルポラリメトリ複素画像は、類似度算出処理部31によって類似度が算出される。類似度算出処理部31は、算出された類似度rの値が所定値より高いときに撮像された地物を既知の地物によって定量的に同定する。
(もっと読む)
目標追尾装置
【課題】目標の統合航跡の誤差の早期収束と、目標の着地予測位置および着地予測範囲を算出する着地予測位置誤差共分散行列の早期収束とを実現した目標追尾装置を得る。
【解決手段】目標Tの2Dセンサ検出結果を出力する検知器10と、目標Tの3Dセンサ検出結果を出力する信号処理器50と、2Dセンサ検出結果から輝度ヒストリを解析する輝度ヒストリ解析処理20と、輝度ヒストリによる推力加速判定処理30と、モデル信頼度制御処理40と、各運動モデルの混合処理、予測処理および平滑処理70〜93と、2Dおよび3Dセンサ検出結果と各運動モデルの予測処理結果とから事後信頼度を算出するモデル信頼度算出処理100と、各運動モデルの統合平滑ベクトルおよび統合平滑誤差共分散行列を算出する統合処理110と、目標Tの着地を予測する着地予測処理120とを備えている。
(もっと読む)
ネットワークレーダシステム
【課題】 より信頼性の高い、目標追尾が行えるネットワークレーダシステムを得ること。
【解決手段】 目標の追尾に割り当てられているレーダと別の切替先レーダとの覆域が離れている場合、レーダ制御部を介して切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、ビーム照射テストの結果、S/N比が所定の閾値以上のときは、レーダ制御部に目標を追尾するレーダを切替先レーダに切り替えさせ、ビーム照射テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダの覆域や目標の探知状況から算出した目標の予測軌道から目標の追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部に再算出させ、レーダ制御部に目標を追尾するレーダを新たな切替先レーダに切り替えさせる追尾レーダ割当評価部を備える。
(もっと読む)
追尾装置
【課題】角度バイアス及び距離バイアス推定精度の高精度化と、バイアス推定の演算時間の高速化を図ることができる追尾装置を得る。
【解決手段】センサ群10、観測値が同一目標から得られた観測値であるかを判定し、同一目標からの観測値の集合を蓄積する観測値データベース30、データベースから同一目標からの観測値を抽出する観測値出力制御処理部40、推定すべき全バイアス成分を、複数組割り当てるバイアス成分組割当処理部50、割り当てられたバイアス成分組毎に設けられた、バイアス成分組初期値設定処理部、バイアス成分組推定処理部及びバイアス成分組収束判定部、バイアス成分組毎のバイアスベクトル推定値とその誤差共分散行列を時系列に蓄積するバイアスデータベース90を備える。
(もっと読む)
アクティブレーダオーギュメンテーション
【課題】 対象目標の電波反射断面積(RCS)は誘導弾や地上装置のレーダとの相対位置関係によって変化するが、従来はRCSを一定としてレーダ評価試験を行うのみであり、このため実目標(航空機、誘導弾等)を実際に飛行させないと、実目標の模擬を行うことができなかった。
【解決手段】 アクティブレーダオーギュメンテーションが備える受信機は、誘導弾との相対位置関係(Az、El)および周波数を計算する計算機、対象目標(航空機、誘導弾等)に応じたRCSモデルのデータベースを備える。これにより実目標(航空機、誘導弾等)を実際に飛行させることなく、実目標の模擬が可能とした。
(もっと読む)
信号処理回路
【課題】不要波を送信する目標の距離を追跡する際、不要波の受信を高精度で検出でき、目標距離の追跡を行える信号処理回路を提供する。
【解決手段】反射波を含む電波を受信検波する送受信部と、レンジゲート、進みゲート、遅れゲート、2個の前段追加ゲート及び2個の後段追加ゲートを発生させるゲート発生部2と、これらのゲートを用いて抽出された受信信号を周波数解析して得たゲート情報に基づき目標距離の距離誤差を計算し、ゲート情報を記憶部に記憶する距離誤差計算部18と、前段追加ゲート及び後段追加ゲートの各信号レベルと閾値とを比較して不要波の受信を検出する不要波検出部17と、受信検出後不要波が消失するまでの時間を予測する時間予測部20とを備え、距離誤差計算部18は不要波の受信が検出される以前に計算したゲート情報を用いて距離誤差を計算する。
(もっと読む)
誘導装置
【課題】 自らは電波を放射せずにレーダなどの電波源からの電波を受信して、この受信信号に対して追尾する誘導装置において、継続的に電波を受信できるかどうかは電波源の挙動次第であり、目標が消失し追尾が継続できない場合がある。目標が消失した要因としては、電波源が周波数を変更し受信帯域幅外の周波数になった可能性や、レーダのスキャン周期の影響で受信電力が低下している可能性等が考えられるが、前者、後者を同時に捜索することが非常に困難である。
【解決手段】 SUM系受信帯域とDIF系受信帯域を別々に制御することで、異なる周波数帯域を同時に捜索することを可能とする。これにより、電波源からの電波放射状況の影響が軽減され捜索性能が向上するとともに、追尾時間が長くなることになるため、誘導性能の向上が可能となる。
(もっと読む)
飛行体捕捉システムおよび飛行体捕捉方法
【課題】 従来よりも容易・迅速にステルス化された目標を捕捉し得る飛行体捕捉システムを提供することを目的とする
【解決手段】 本発明に係る飛行体捕捉システムは、飛行体が飛行することにより発生する飛行機雲を捕捉する飛行機雲レーダ装置と、飛行する飛行体を捕捉する捜索レーダ装置と、前記飛行機雲レーダ装置により飛行機雲が捕捉され、かつ前記捜索レーダ装置により飛行体が捕捉されない場合に前記飛行機雲を発生する飛行体がステルス飛行体であると判断するステルス飛行体判断装置とを具備することを特徴とする。
(もっと読む)
1 - 20 / 75
[ Back to top ]