
Fターム[5J070AE07]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 面(壁面・地面又は海面など) (358)
Fターム[5J070AE07]に分類される特許
1 - 20 / 358
地物情報判読用画像生成方法
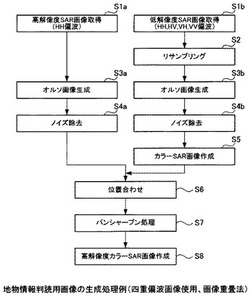
【課題】SAR画像等の単偏波レーダ画像と多偏波レーダ画像とを組み合わせて、より正確な地物情報の判読が可能な合成画像を生成する。
【解決手段】飛翔体に搭載したレーダ装置から得られる、偏波を利用して撮影されたレーダ画像データを基に地物情報判読用画像を生成する際、まずレーダ装置で撮影された地域の低解像度の多偏波レーダ画像データの各々に色情報を割り当てる。次に、その色情報が割り当てられた低解像度の多偏波のレーダ画像データと、レーダ装置で撮影された地域の高解像度の単偏波レーダ画像データを合成し、高解像度のカラーレーダ画像データを得る。
(もっと読む)
土地状態推定システム及び土地状態推定方法

【課題】 3時期以上の衛星画像において、各時期の画像のピクセルごとに計算できる任意の一つの指標値を用いて、対応する土地の状態を推定できる土地状態推定システムを提供することを課題とする。
【解決手段】 なんらかのイベント(例えば、津波、等)発生前とイベント発生後とその後の少なくとも1時期の合計3時期以上の衛星画像における、位置的に対応する、ピクセルごとに計算できる任意の指標値から、対応する土地の状態を表す特徴量を推定することを特徴とする。
(もっと読む)
レーダ装置およびレーダ装置の性能低下判定方法
【課題】短時間で高精度な性能低下判定処理を実現することができるレーダ装置およびレーダ装置の性能低下判定方法を得る。
【解決手段】レーダ装置1の検知性能に関する性能低下判定処理を実施する性能低下判定部50は、測定部40で得られた測定結果を加工して、加工済反射物体を生成する測定結果加工部51と、相対距離の範囲と方位角度の範囲とによって形成されるエリア毎に、加工済反射物体の反射波レベルの代表値を計算し、エリア毎反射波レベル代表値を算出するエリア毎反射波レベル代表値計算部52と、エリア毎に、エリア毎反射波レベル代表値とエリア毎反射波レベル代表値閾値とを比較して、エリア毎性能低下度を算出するエリア毎性能低下度計算部53と、各エリアについて、エリア毎性能低下度を組み合わせて性能低下判定結果を出力するエリア毎性能低下度組合せ判定部54とを有する。
(もっと読む)
移動物体検出装置、移動物体検出方法及び移動物体検出用コンピュータプログラム
【課題】レーダの検知範囲内に存在する静止物体を移動物体として誤検出することを抑制可能な移動物体検出装置を提供する。
【解決手段】移動物体検出装置(1)は、レーダ(2)から、そのレーダからの距離とその距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信するインターフェース部(11)と、複数の計測データのそれぞれから第1の閾値以上となる受信レベル信号を検出し、レーダからの距離ごとに、第1の閾値以上となる受信レベル信号の出現頻度を表す背景値を求める背景データ更新部(21)と、計測データ中で第1の閾値よりも高い第2の閾値以上の強度を持つ受信レベル信号に対応する距離にある物体のうちで、背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する移動物体検知部(22)とを有する。
(もっと読む)
ドップラ式速度計
【課題】ドップラ効果を利用して速度を計測するドップラ式速度計において正確な速度を得る。
【解決手段】所定周波数の送信波を送信する送信手段110と、送信波の反射波を受信する受信手段120と、反射波に基づくドップラ信号の周波数スペクトルを検出するスペクトル検出手段141と、を備え、検出した周波数スペクトルを用いて速度を計測するドップラ式速度計1であって、速度に対するドップラ信号の基準周波数スペクトルと検出した周波数スペクトルとの相関から基準周波数スペクトルを特定するスペクトル特定手段142と、特定した基準周波数スペクトルに対応する速度を反射波に基づいて検出した速度として出力する速度出力手段143と、を備える。
(もっと読む)
センシングシステム及びセンシングプログラム
【課題】遅延波の電力変動を利用して被検知体の状態を判別できるようにする。
【解決手段】本発明のセンシングシステムは、電波の送信から1又は複数の被検知体に反射された電波を受信するまでの、1又は複数の被検知体の遅延時間を保持する遅延時間保持手段と、到来波の受信電力値を十分短い間隔で連続的にサンプリングして、電波送信時から受信された遅延波の時系列の受信電力値を示す電力遅延データを取得する電力遅延データ取得手段と、電力遅延データを参照し、各被検知体の遅延時間に相当する到着時刻における受信電力値に基づいて、各被検知体の状態を判定する状態判定手段とを備える。
(もっと読む)
物標検出装置,壁判定方法
【課題】車両の周囲に存在する物体を検出する物標検出装置において、壁状の静止物体が移動物体として誤認識される頻度を低減する。
【解決手段】探査周期毎に測距データを取得し(S100)、取得した測距データをクラスタリング(S110)し、自車両が停止中ではない場合(S120-N)、クラスタが単一の反射点からなる場合、即ち、クラスタが示す物標が壁であるか否かを判定できない場合(S140-N)、または、クラスタが複数の反射点からなり(S140-Y)、かつ同一クラスタに属する二つの反射点間を結ぶ直線の傾き(基準方向と交差する角度)Yが許容壁範囲内(X−ΔX≦Y≦X+ΔX)にある場合、即ち、クラスタが示す物標が壁であると判定された場合(S150,S160-Y)、そのクラスタを、トラッキング処理や移動/停止判定の処理対象から除去する(S170)。
(もっと読む)
合成開口を用いるレーダシステム
【課題】合成開口レーダ(SAR)システム、およびSARシステムにおいて信号を処理する方法を提供すること。
【解決手段】SARシステムが、少なくとも1つの部分アンテナを有するレーダアンテナを含み、その少なくとも1つの部分アンテナそれぞれが、割り当てられる送信/受信モジュールを有する複数の位相中心、および位相中心の信号をコヒーレントに処理するための信号プロセッサを含む。信号プロセッサは、位相中心の送信/受信モジュールによって受信されるアナログ受信信号をデジタル化および処理するように、ならびにデジタル的に処理された受信信号をアナログ信号に変換するように構成および配置されるハイブリッドビーム形成モジュールを備える。さらには、アナログ受信ネットワークが、それぞれの送信/受信モジュールのアナログ信号を互いに合成して、出力信号を形成するように構成および配置される。
(もっと読む)
目標類識別装置
【課題】目標信号データのクラッタ推定精度に左右されずに、所望の類別性能を維持する目標類識別装置を提供する。
【解決手段】異クラッタ条件の教師信号データを用いてクラッタ推定精度別の辞書データを生成するクラッタ推定精度別辞書生成部2と、目標信号データのクラッタ推定精度に応じてクラッタ推定精度別の辞書データから照合対象となる辞書データを選択するクラッタ推定精度別辞書選択部5と、クラッタ推定精度別辞書選択部5により選択された照合対象辞書データに基づいて目標信号データの種類を判定する種類判定部6とを備えた。
(もっと読む)
物体識別装置、および物体識別プログラム
【課題】車両の周囲に存在する物体の種別を識別する物体識別装置において、物体を正確に識別できるようにする。
【解決手段】衝突防止システムにおいては、自車両の周囲に音波または電磁波を照射して該音波または電磁波の反射波を検出することによって得られた、反射強度および自車両周囲の物体までの距離の情報を含む物体情報を取得し(S110)、物体の高さの情報を取得する(S130)。そして、物体の高さおよび物体までの距離に応じて反射強度を補正し(S140)、補正後の反射強度に応じて物体の種別を識別する(S170〜S280)。よって、反射強度を正常に検出することを妨害する要素を除外するように反射強度を補正することができ、正確に反射強度を検出できるようにすることで、物体を正確に識別することができる。
(もっと読む)
物体検知装置
【課題】画像処理による負荷を極力増大させることなく歩行者等の存在を検知できる物体検知装置を提供する。
【解決手段】物体検知装置は、各探知領域内の強度が所定値以上である反射波の方向の範囲を物体が存在する物体範囲として、物体の幅及び位置を算出する幅・位置算出手段33と、各物体の幅及び位置に基づき、装置の前方に、各探知領域と交差する路面が存在し、各探知領域における物体範囲が分離していると判定された場合、物体範囲の分離している部分に対応する画像データに基づき、検知対象である目的物の有無を検出する目的物検出手段39とを備える。
(もっと読む)
画像レーダ装置
【課題】目標とレーダの間の相対運動が未知である等の場合でも、回転運動によって発生する画像のぼけを精度よく補償することができるとともに、クロスレンジスケーリングを実施できるようにする。
【解決手段】レンジヒストリ取得回路1により取得されたレンジヒストリで、不要な並進運動によって発生するレーダと目標間の不要な距離変化を補償する並進運動補償回路2や、並進運動補償回路2により距離変化が補償されたレンジヒストリで、目標における高周波信号の各反射点で、回転運動によって発生するレンジ方向のぼけを補償する回転レンジセル移動補償回路3などを設ける。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】道路における停止物の中から反射体の物体単位データを抽出し、抽出した反射体の物体単位データに基づいて反射体の列を通る円を近似することにより道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、反射体の物体単位データを抽出する際には、前回周期で抽出した反射体の物体単位データのうち、前回周期で算出した道路形状推定Rを基準とした径方向の所定範囲内に位置するものを今回周期の抽出処理で抽出した反射体の物体単位データに追加する。また、道路形状認識を行う際には、データ追加後の反射体の物体単位データに基づいて道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】送信波照射に対する反射波に基づいて、少なくとも物体までの距離を含む物体単位データを車幅方向角度に対応して取得する。そして、反射波に基づいて得た物体の相対速度及び自車速に基づいて移動物か停止物という認識種別を判定し、認識種別の判定結果に基づいて、移動物の中から自車両180に対する先行車181及び先々行車182の各物体単位データを抽出し、停止物の中から道路に沿って設置された反射体の各物体単位データを抽出する。この後、自車両180、先行車181、及び先々行車182の各物体単位データを用いてこれら3点を円で近似することにより当該円の半径を算出し、円の半径と、反射体の列と、に基づいて道路形状を認識する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な物体単位データを抽出し、物体単位データに基づいて路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、抽出処理の後、前回周期の抽出処理で得た物体単位データを今回周期の抽出処理で得た物体単位データに追加するデータ追加処理を行い、認識処理ではデータ追加処理で得た物体単位データに基づき道路端を認識する。
(もっと読む)
物体検知装置
【課題】画像処理による負荷を極力増大させることなく歩行者等の存在を検知できる物体検知装置を提供する。
【解決手段】物体検知装置は、強度が第1閾値以上である反射波の方向の範囲を物体が存在する物体範囲として、物体の幅を算出する物体幅算出手段33と、物体の幅が所定幅以上である幅広の物体に係る反射波の強度等が特定の状況にある場合、第1閾値よりも大きな第2閾値により、幅広の物体に係る物体範囲を分割する物体範囲分割手段36と、その物体範囲の分割後の各範囲に対応する画像データに基づき、目的物を検出する処理を行う目的物検出手段39とを備える。
(もっと読む)
画像レーダ信号処理装置
【課題】地上局で精度の高いSAR画像を従来以上の観測データ数で取得する。
【解決手段】地上局からのコマンドを受信するコマンド受信手段11、コマンドに従い、所定領域に信号を放射し、当該信号に対する当該所定領域からの反射信号を受信することで受信信号を取得する目標観測手段12、飛行体の運動データを取得する飛行体観測手段13を有する観測手段1と、コマンドに従い、受信信号および運動データに基づいて、観測手段1が観測を行った通信可能時間帯内で画像再生処理を行い、SAR画像を再生する高速画像処理手段3と、コマンドに従い、受信信号および運動データに基づいて、通信不可時間を利用して高速画像処理手段3より高精度な画像再生処理を行い、SAR画像を再生する小型画像処理手段4と、コマンドに従い、SAR画像を前記地上局に送信する送信処理手段5とを備えた。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な物体単位データを抽出する。また、抽出した物体単位データの中から、車幅方向の距離が最も自車側に位置する停止物体の横位置を抽出すると共に、車幅方向において最も自車側の停止物体の横位置から所定距離だけ離れた範囲内に位置し、かつ、自車からの直接の距離が最も小さい停止物体を起点に決定する。そして、接続条件として距離が単調増加であるデータ同士を起点から接続してグルーピングして路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体の相対速度及び自車速に基づいて移動物体か停止物体という認識種別を判定し、この認識種別の判定結果に基づいて、道路形状を認識するために有効な前記物体単位データを抽出する。そして、自車と先行車との間における自車の走行路上および先行車と先々行車との間における先行車の走行路上のいずれかに停止物体が存在する場合、抽出した物体単位データの中から前記走行路上の停止物体に該当するデータを削除する。この後、左角度方向から右角度方向及び右角度方向から左角度方向の両方向についてそれぞれ、接続条件として距離が単調増加であるデータ同士をグルーピングして路側物群のデータを形成し、その形成された路側物群のデータに基づき道路端を認識する。
(もっと読む)
広域撮影制御システム
【課題】航空機等に搭載したレーダセンサにより広域災害における画像収集を行う際に、撮影計画外の目標を撮影する必要が後から生じた場合でもパイロットの負担を軽減するとともに迅速に撮影することができる広域撮影制御システムを提供する。
【解決手段】飛しょう体に搭載され、上空から地上を撮影するレーダ1と、飛しょう体の位置情報を自機位置情報として収集するセンサ位置情報収集部23と、飛しょう体に搭載され、レーダ1の撮影目標の位置を示す撮影目標位置情報と飛しょう体の通過目標の位置を示す通過目標位置情報とを含む撮影計画とセンサ位置情報収集部23により収集された自機位置情報とに基づいてレーダ1を制御する撮影制御部26と、地上側に設置され、新たな撮影目標の撮影目標位置情報を送信する目標位置情報送信部31と、飛しょう体に搭載され、目標位置情報送信部31により送信された撮影目標位置情報に基づいて撮影計画の通過目標位置情報を更新する再撮影計画部25とを備える。
(もっと読む)
1 - 20 / 358
[ Back to top ]