
Fターム[5J070AE09]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 人 (687)
Fターム[5J070AE09]に分類される特許
621 - 640 / 687
情報入力方法及び情報入力装置
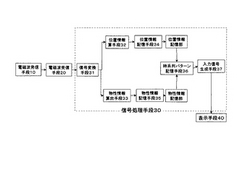
【課題】対象物の3次元空間における位置情報並びに物性情報を検出して、少なくとも1つのポイントの位置情報または変位情報を検出して、電子機器などの機器に対して、たとえ複数の高精度なデータであっても、その情報入力を行うことができる技術である。
【解決手段】電磁波を発信する電磁波発信手段10からの電磁波に対して、一つ以上の対象物によって反射波が生成され、反射波が電磁波受信手段20で受信される。信号処理手段30で、受信した電磁波の信号に基づき、反射波を生成した対象物の3次元空間における位置情報を算出すると共に対象物をそれと同定する物性情報を検出し、こうして検出した複数の情報に基づき入力信号を一つ以上生成して、入力信号を機器に対して提供する。
(もっと読む)
監視装置、周囲監視システム、および車両

【課題】レーダセンサで、車両周囲の広い範囲を監視しようとすると、数多くのセンサが必要になり、コストが高くなるという課題があった。
【解決手段】広角の単一の電波、またはそれより狭い範囲の複数のビーム方向の電波を送出する送信アンテナ部103と、送信アンテナ部103が送信し対象物に反射した複数のビーム方向の電波を受信し、第1の給電部122および第2の給電部123を有する受信アンテナ部104と、電波として送出するための信号を送信アンテナ部103に伝達する送信部102と、受信アンテナ部104が受信した電波を、受信アンテナ部104から信号として伝達される受信部106と、第1の給電部122または第2の給電部123のいずれかに給電されるように切り替えて、2つの電波のビーム方向を形成させ、監視領域を制御するビーム切り替え手段105とを備えた。
(もっと読む)
侵入物検知装置および電波反射器
【課題】検知対象物と非検知対象物との識別精度を高め、誤検知を低減し得る信頼性の高い侵入物検知装置を提供する。
【解決手段】レーダ1の送受信アンテナ1aをパラボラアンテナにより構成し、電波反射器2を複数のリフレクタからなるリフレクタアレイ6により構成し、レーダ1近傍の送信波5および電波反射器2近傍の反射波7のビーム幅A1,A2を、検知対象から除外すべき鳥9などの非検知対象物が遮蔽し得るビーム幅Cよりも大きく設定する。
(もっと読む)
侵入・障害物検出装置及び無給電応答装置
【課題】侵入・障害物の誤認識を減少させ、低消費電力を可能とする検出装置を提供する。
【解決手段】本検出装置は、検知装置と応答装置とを有し、上記応答装置は、検知装置から受信した電波の周波数のうち特定の周波数以外の周波数をフィルタリングするフィルタと、フィルタを通過した特定の周波数の電波を増幅することなく検知装置に対して送信するアンテナとを有する。また、上記検知装置は、基準となる周波数及び特定の周波数を含む複数の周波数の電波をアンテナから応答装置に対して送信させる発信手段と、特定の周波数の電波の受信の有無と基準となる周波数の電波の受信の有無とに基づき侵入又は障害物の有無を判断する判断手段とを有する。応答装置は増幅することなく特定の周波数の電波を送信するため、消費電力を抑えることができ、無給電でも可能である。さらに、検知装置は、ほとんどのケースを取り扱うことができる。
(もっと読む)
デバイス間距離測定
異なるクロックレートを有しうるクロックを有する第1及び第2デバイス。デバイス間を伝播する信号の伝播距離の指標を得ることは、第1デバイスから第2デバイスにダイ1信号12を送信することを伴う。ターンアラウンドタイムTAT後、第2信号14は、第2デバイスから第1デバイスに送信される。クロック内のあらゆるエラーは、ターンアラウンドタイムTATの測定値のエラーをもたらしうる。デバイスは、LO周波数整合が存在するまで周波数分割比を調整することにより、若しくは、混合された信号の包絡線のオフセット周波数を求めることにより、第1及び第2デバイスのクロックレートの比を算出する回路を含む。クロックレートの比は、ターンアラウンドタイムTATを補償してエラーを緩和するために用いられる。正確な距離の測定値は、リレーアタックが車両セキュリティシステムで発生したか否かを判断するために用いることができる。 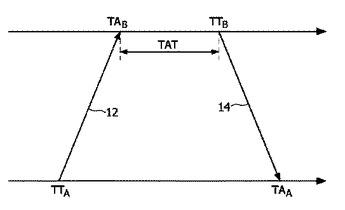 (もっと読む)
(もっと読む)
障害物検知装置
【課題】 乗員に違和感を与えずに障害物との距離を正確に伝えることができる障害物検知装置を提供する。
【解決手段】 障害物検知装置10は所定の検知領域に波動を送信する送信部と前記波動が障害物21によって反射された反射波を受信する受信部とからなるセンサ部7により、車両1の障害物21を検知する。センサ部7の出力により障害物21までの距離を計測する。検知距離可変回路16により最大検知距離L1内における予め定められた検知距離L2,L3を変化させる。警報手段20により検知距離に対応して段階的に警報を発生する。
(もっと読む)
多目的レーダ監視システム
本発明は森林火災のようなRCSが低い対象物(110,140,150,160,190)を検出するレーダシステム(100)を開示する。このシステムは、機構的に固定された複数のアンテナ(220)を備え、レーダエネルギーを送信する複数の送信局(120)と、機構的に固定された複数のアンテナ(220)を備え、前記複数の送信局から送信されたレーダエネルギーの反射波を受信する複数の受信局(130)とを有する。前記送信局と前記受信局との複数アンテナ(220)は地面に対して実質的には平行なメインビーム(221)をもち、前記複数の受信局の少なくともサブセットには、第1と第2の受信信号を記録する手段と、前記信号の内の一方を前記信号の他方から減算する手段とを備える。前記送信局と前記受信局とは10〜100MHzの周波数範囲で機能するように構成されている。 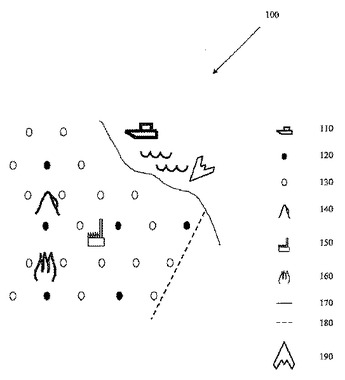 (もっと読む)
(もっと読む)
レーダシステム、物体検出方法、レーダ装置、電波反射体
【課題】 レーダ装置と電波反射体とを併用する物体検出において、設置環境等に影響されることなく、高精度の物体検出を実現する。
【解決手段】 レーダ送受信機10は、水平偏波の偏波送信波21を検出反射体30に向けて送信する水平偏波送信アンテナ11aと、垂直偏波のみを選択的に受信する垂直偏波受信アンテナ11cを備えている。検出反射体30は、入射した偏波送信波21の偏波面を90°変化させて垂直偏波の偏波受信波22として送受信アンテナ11に向けて反射する機能を備えている。検出反射体30の近傍にノイズ物体が存在しても、このノイズ物体からは水平偏波の偏波送信波21がそのまま反射されるため、レーダ送受信機10では、検出反射体30から返される垂直偏波の偏波受信波22を選択的に検出でき、この偏波受信波22が障害物等にて遮断されたときの受信電力の変化を高精度に検知できる。
(もっと読む)
車上盗難警戒器
【課題】車外と車内とを確実に識別して車外近傍の人の移動や車内侵入に対する盗難警戒を行うことができる車上盗難警戒器を提供することにある。
【解決手段】マイクロ波センサは、マイクロ波アンテナ11によって車内及び車外周辺を検知範囲としてマイクロ波信号を送信するとともに反射されてくるマイクロ波信号を受信して該受信したマイクロ波信号の周波数偏移により移動体を検知する。一方超音波センサは超音波信号を送受波器21によって車内に送波するとともに反射されてくる超音波信号を受波して、受波した超音波信号の周波数偏移から移動体を検知する。両センサにおいて周波数偏移から移動体を検知する回路部は共用回路部3によって構成され、信号処理回路4はこの共用回路部3から出力されるマイクロ波センサの検知信号、超音波センサの検知信号を監視し、その検知信号に基づいて報知器5により報知を行わせる。
(もっと読む)
監視システム及び監視方法
【課題】
高齢者介護等で利用可能な監視システムを安価で簡単な装置により実現するとともに、操作が容易で実用性の高いシステムを提供する。
【解決手段】
携帯可能で且つ特定のタグIDを選択して電波信号を送受信する親機1を所定位置に設置するとともに、携帯可能で且つ親機1から受信した電波信号に応じて電波信号(応答信号)を送受信する子機2を監視対象物に取付け、監視モードにより子機2からの電波信号の受信状態を表示又は音響出力することによって、所定領域内への監視対象物の進入を監視し、捜索モードにおいて親機1を移動させつつ、監視モードにおける通常時の電波強度よりも強い電波強度から段階的に電波強度を弱くしていくことにより監視対象物を捜索する。
(もっと読む)
無線タグの位置推定システム
【構成】無線タグの位置推定システムは、所定空間に配置された複数の無線タグ読取機14を含む。この所定空間に配置された読取機14による検出に基づいて、その検出時刻における所定空間内の無線タグの位置が推定される。その位置の推定された無線タグを目標として移動型ロボット16の移動が制御させる。移動型ロボット16には無線タグ読取機18が設けられている。この読取機18によって目標とされた無線タグが検出されたとき、読取機18による検出に基づいて、当該検出時刻における当該無線タグの推定位置座標が算出されて記録される。
【効果】無線タグの位置をより正確に推定することができる。
(もっと読む)
物標検知装置及び物標検知システム
【課題】 従来の車両検知装置より小型で破損から保護することができる物標検知装置を提供する。
また、物標の有無だけでなく、その方向も検知できる物標検知システムを提供する。
【解決手段】 マイクロ波発振器1で発生するマイクロ波信号1aを第1及び第2の基準信号u1,u2と第3の送信信号4aとに分け、第3の送信信号4aを物標6に対して照射し、物標6で反射された第1及び第2の受信信号w1,w2と第1及び第2の基準信号u1,u2を第1及び第2の検波器81,82に入力して第1及び第2の検波信号8a,8bを得る。そして、第1及び第2のA/D変換器で検波信号8a,8bをA/D変換して得られた検波データx,yを演算処理して物標6の有無を判定する。また、物標検知装置2台を使用して、それぞれの物標検知装置から出力される信号ベクトルの位相差の正負により物標6の方向を判定する。
(もっと読む)
距離算出システム、距離算出システムの距離算出方法
【課題】 第1通信装置と第2通信装置の間における当事者以外による不正通信を防止すべく、第1通信装置と第2通信装置の間の距離を確実に算出することができる距離算出システム、距離算出システムの距離算出方法を提供することを目的とする。
【解決手段】 第1通信装置と第2通信装置との間の距離を算出する距離算出システムであって、第1通信装置は、第2通信装置との間の距離を算出するための距離算出用信号を送信する送信部と、第2通信装置から返信された距離算出用信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号と、の位相差を検出する検出部と、検出部にて検出された位相差に基づいて、第2通信装置との間の距離を算出する算出部と、を備え、第2通信装置は、第1通信装置から送信された距離算出用信号を返信する返信部を備えた、ことを特徴とする。
(もっと読む)
通信管理システム、通信管理システムの通信管理方法、通信管理装置、通信装置
【課題】 所定空間内の物体移動を検知した検知結果と第2通信装置の距離が予め定められた距離未満であるとの判別結果に基づき所定の処理を可能とする通信管理システム、通信管理システムの通信管理方法、通信管理装置、通信装置を提供することを目的とする。
【解決手段】 第1通信装置は第2通信装置との距離を算出するための距離算出用信号を送信する第1送信部と送信した当該距離算出用信号と受信した当該距離算出用信号に応じた信号との位相差を検出する検出部と位相差に基づいて第2通信装置の距離を算出する算出部とを備え、第2通信装置は距離算出用信号に応じた信号を送信する第2送信部を備え、算出した距離が予め定められた距離未満であるか否かを判別する判別部と所定空間内の物体の移動を検知するセンサを備え、センサによる検知結果と予め定められた距離未満であるときの判別結果とに基づいて所定の処理を行うことを可能とすることを特徴とする。
(もっと読む)
距離算出通信装置、距離算出通信装置に用いる距離算出プログラム
【課題】 相手側通信装置との間における当事者以外による不正通信を防止するべく、相手側通信装置との距離を確実に算出することができる距離算出通信装置、距離算出通信装置に用いる距離算出プログラムを提供することを目的とする。
【解決手段】 相手側通信装置との間の距離を算出するための距離算出用信号を送信する送信部と、相手側通信装置から返信された距離算出用信号を受信することによって、送信したときの当該距離算出用信号と、受信したときの当該距離算出用信号と、の位相差を検出する検出部と、検出部にて検出された位相差に基づいて、相手側通信装置との間の距離を算出する算出部と、を備えたことを特徴とする。
(もっと読む)
移動体検知装置
【課題】 2周波CW方式レーダを用いた移動体検知装置において、2つのドップラ信号間の位相差をFFT等の複雑な演算処理で求めると処理負荷が大きい。
【解決手段】 ミキサ32から時分割で交互に出力されるドップラ信号D1,D2を切替器34で分離し、それぞれをLPF36,38で平滑化する。差分器44は、平滑化されたD1,D2の差信号を生成する。差信号の振幅BはD1,D2相互の位相差Δφ及び元のドップラ信号の振幅Aに応じて増減する。移動体までの距離Rは位相差Δφと比例関係にあり、Δφは信号強度比κ(≡B/A)に比例する式で近似される。そこで、除算器50でκを求め、これを距離Rを表す指標として用い、移動体検知を行う。
(もっと読む)
移動物体検出システム
【課題】 入口が明確でないような空間において、複数の移動物体が識別子の受信領域および位置検出領域に侵入したとき、複数の移動物体の位置と識別子とをそれぞれ対応付けることができる移動物体検出システムを得る。
【解決手段】 この発明に係る移動物体検出システムは、移動物体の位置を検出する位置検出手段5と、移動物体の位置履歴を管理する位置履歴管理手段6と、移動物体が保持している携帯端末2から移動物体の識別子を受信する識別子受信手段3と、識別子の履歴を管理する識別子履歴管理手段4と、移動物体の位置履歴および識別子の履歴に基づいて移動物体の位置と識別子とを対応付ける移動物体対応付け手段7とを備え、少なくとも位置検出手段の位置検出領域41の一部と識別子受信手段の識別子受信領域31の一部とは重なっているものである。
(もっと読む)
超ワイドバンド信号を時間的位置において安定化する方法及びこれを実施する生存物監視レーダー
本発明は、捜索及び救出作業に係り、瓦礫の積極的測量に使用できる。本発明は、探索作業に影響を及ぼす温度やオペレータの手の動きや震えに関連した干渉保護を改善できるようにする。本発明の方法は、基準信号に基づいて超帯域巾信号(UBW)を形成し、このように形成されたUBW信号を空間へ放出し、UBW信号を受信し、UBW信号を、基準UBW信号との相関により処理し、受信したUBW信号を処理する間に、基準UBW信号を、前記相関された信号の最大電圧と最小電圧との間の中間セクタにチェックポイントの初期位置をセットする時間だけ、遅延させ、前記チェックポイントの位置を周期的に監視し、そしてチェックポイントの位置が初期位置からずれているときには、前記整形された超ワイドバンド信号の空間への送信の遅延を変更して、チェックポイントの位置をリセットすることで構成される。 (もっと読む)
入退場管理システムにおける共連れ防止方法
【課題】タグ携帯の有無及びそのタグ数の認証と、画像分析による人数カウントとに基づいて正確な入退出者数をカウントするようにしてより高度のセキュリティ管理を行えるようにした入退場管理システムにおける共連れ防止方法を提供すること。
【解決手段】固定側に配置したコントローラCTLと、各種情報などを予め入力したタグT間を光信号及び/又は電波にて送受信した情報と、認証用データベースの情報とに基づいて判定して位置ID及びタグIDを認証し、かつ該認証判定によるカウント数と、カメラによる画像分析の人数カウントとを比較し、その判定結果に基づいてタグ不携帯者の共連れ不正侵入を防止する。
(もっと読む)
車両用始動支援システム
前方を走行する車両(36)を位置測定するための長距離位置測定システム(10)と、始動プロセスを起動および制御するための始動制御器(24、26)と、を備える車両用始動支援システムにおいて、長距離位置測定システムが自己の車両(34)のすぐ前方の対象(46)を位置測定するための短距離位置測定システム(12)と組合されており、近距離位置測定システム(12)の信号に応じて始動プロセスを阻止するように決定装置(22)が形成されている。 (もっと読む)
621 - 640 / 687
[ Back to top ]