
Fターム[5J070AE09]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 人 (687)
Fターム[5J070AE09]に分類される特許
661 - 680 / 687
マイクロウエーブセンサ
【課題】 屋外設置時の近距離の草木などによる誤報を極力回避するとともに、侵入者が遠距離で監視対象領域を横切るように動いた場合などでも的確に検出することが可能なマイクロウエーブセンサを提供する。
【解決手段】 検知エリアに向けて周波数の異なる複数のマイクロ波を送信し、この検知エリア内に存在する物体からの各マイクロ波の反射波に基づいて物体検知動作を行うマイクロウエーブセンサ1において、上記検知エリア内の物体までの「相対距離」を求める距離認識手段41と、上記検知エリア内の物体の「単位時間当たりの移動距離」を求める移動距離認識手段42と、距離認識手段41および移動距離認識手段42の出力を受け、上記検知エリア内の物体までの「相対距離」が長いほど、物体検知判定のための閾値である「単位時間当たりの移動距離値」を小さく設定して物体検知判定動作を行う物体判定手段43とを備えている。
(もっと読む)
接近警報装置

【課題】充電部に最も近い部位における接近距離に基づいて作業者の接近を検知する。接近距離の測定の精度を向上させる。小型化する。
【解決手段】インパルス信号3の送信タイミングとインパルス信号3の反射波の受信タイミングに基づいて作業者6の接近距離dを算出すると共に、接近距離dと記憶手段に予め記憶している接近限界距離dmaxとをインパルス信号3に重畳して送信する接近距離検出手段8と、インパルス信号3を受信し、接近距離dが接近限界距離dmaxよりも短い場合に作動する警報手段9とを備え、接近距離検出手段8は充電部11の磁束変化の影響を受ける位置に設置されており、電磁誘導による誘導電流で作動するものである。
(もっと読む)
伝搬時間測距システムについての改善
キーレスアクセス制御システムのような伝搬時間測距システムは、第1の部分(10)と第2の部分(12)とを有する。第2の部分(12)は、キーフォッブのような携帯用の装置として実装されてもよい。双方の部分は、相互に通信を行う信号送受信手段(14、22及び26、32)を有する。少なくとも第1の部分は、伝搬時間に基づいて第1の部分と第2の部分との間の距離を決定する手段を有する。第1及び第2の部分が比較的大きく距離が離れているときに電力を節約するために、伝搬時間測定手段は、比較的粗いアルゴリズムに基づいて時間を計算し、これらの部分が比較的近いときに、より正確なアルゴリズムを使用して計算が実行される。このシステムの変形及び改良では、第1及び第2の部分が比較的大きく距離が離れているときにクロック周波数が減少してもよく、これらが近いときに増加してもよい。また、第1及び第2の部分が比較的近いときに送信電力が減少してもよく、これらが比較的大きく距離が離れているときに増加してもよい。伝搬時間測距システムは、エントリーセキュリティシステムだけではなく、幼児や職員や装置を追跡するシステムのような追跡システムにも適用され得る。 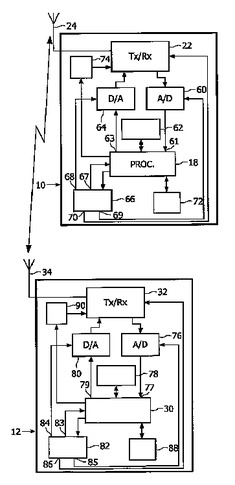 (もっと読む)
(もっと読む)
探索システム、探索対象端末、探索端末、探索方法、探索端末の制御方法、探索端末の制御プログラム及び探索端末の制御プログラムを格納したコンピュータ読み取り可能な記録媒体
【課題】探索対象者の位置を迅速に、かつ、精度良く把握することができる探索システム等を提供すること。
【解決手段】探索対象端末20は、位置情報衛星からの位置関連信号に基づいて現在位置を測位して探索対象端末の現在位置を示す探索対象位置情報を生成する探索対象位置情報生成手段と、励振信号に対応する応答信号を送信する応答信号送信手段等を有し、探索端末82は、探索対象位置情報に示される探索対象端末20の現在位置と探索端末位置情報に示される探索端末82の現在位置を比較する位置比較手段と、位置比較手段の比較結果に基づいて、探索対象端末20に対して励振信号を送信する励振信号送信手段と、探索対象端末20から励振信号に対応する応答信号を受信する応答信号受信手段と、応答信号の方向を特定する応答信号方向特定手段等を有する。
(もっと読む)
車両周囲監視装置およびそれを具備した車両
【課題】 1つのセンサで車両周囲の広い領域が監視可能となる車両周囲監視装置およびそれを具備した車両を提供する。
【解決手段】 本発明の車両周囲監視装置は、物体の存在を検知する、あるいは物体までの距離を計測するセンサ1と、センサ1からの情報に基づいて車両100と物体との衝突などの危険度を判断する処理部3とを有する。センサ1は、車両の車輪側面に固設され、車両100が走行した際、センサ1とそのビームBとが車輪回転軸を中心に回転する。これによって、車両100が走行した場合、センサ1が検知する領域をセンサ単体の検知領域より広くすることができる。
(もっと読む)
物体検出法及び装置
物体の検出方法と装置に関する。1実施例では、保護領域に進入する人物を低パワー偏光電波で照射する。人物から反射される異なる偏光波を収集する。反射信号の多様なパラメータを測定し、これらの多様な選択された相違を計算して隠蔽武器を検出する。これらの相違は時間機能としてプロットされるとパターンを創出する。訓練された人工知能ネットワークパターン認識プログラムを使用してこれらのパターンを評価し、自動的に武器の存在を判定する。 (もっと読む)
固定アレイを有するミリ波活性なイメージングシステム
活性なミリ波イメージングシステム(20)は、電磁放射(26,30)を、被検体ポジション(28)の被検体と送受信するよう構成されたアンテナ機器(22)を含む。コントローラ(24)はアンテナ機器(22)を操作し、受信した放射(30)を表す出力(48)を作るよう構成されたトランシーバ(38)、及びトランシーバ出力(48)を被検体の画像を表す画像データ(50)に変換するよう適合されたプロセッサ(40)を含む。アンテナ機器(22)は、被検体の周囲に沿うか被検体に向かうか被検体から離れるように、又は関係するアンテナ機器(22)と反対方向に、部分的又は連続したループ中を移動する。アンテナ機器(82)中のアンテナユニット(94)は、アレイ(98)に沿って異なる角度軌跡に向けられる。アンテナアレイ(582)は、複数のアレイセグメント(592,595,596)からも形成でき、アレイ(582)のグループはアンテナ機器(571)を形成するよう合成もできる。 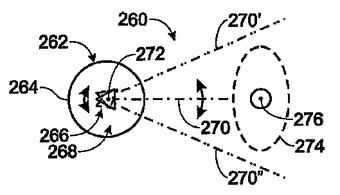 (もっと読む)
(もっと読む)
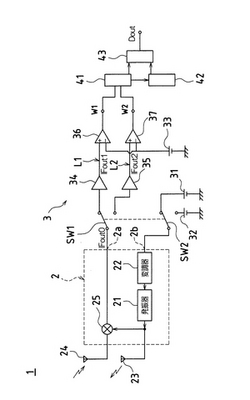
短いパルス/ステップ周波数のレーダシステム
短いパルス、ステップ周波数、センターライン処理を組合わせた特有のハードウェアアーキテクチャである。本発明のアーキテクチャは短いパルスを送信する送信機と、そのパルスを受信してそれに応答して出力信号を提供する受信機とを有するレーダシステムを構成しており、各パルスは周波数がステップされている。例示的な実施形態では、送信機は周波数ソースと、そのソースに結合されたRFスイッチと、RFスイッチを制御する制御装置とを含んでいる。受信機はセンターラインラフィングフィルタで構成されている信号プロセッサを含んでいる。その信号プロセッサはそれぞれ距離ゲートとデジタルフィルタを有する多数のチャンネルを有している。デジタルフィルタは距離ドップラマトリックスを出力するように構成された高速フーリエ変換を含んでいる。 (もっと読む)
ミリ波活性なイメージングシステム
活性なミリ波イメージングシステム(20)は、電磁放射(26,30)を、被検体ポジション(28)の被検体と送受信するよう構成されたアンテナ機器(22)を含む。コントローラ(24)はアンテナ機器(22)を操作し、受信した放射(30)を表す出力(48)を作るよう構成されたトランシーバ(38)、及びトランシーバ出力(48)を被検体の画像を表す画像データ(50)に変換するよう適合されたプロセッサ(40)を含む。アンテナ機器(22)は、被検体の周囲に沿うか被検体に向かうか被検体から離れるように、又は関係するアンテナ機器(22)と反対方向に、部分的又は連続したループ中を移動する。アンテナ機器(82)中のアンテナユニット(94)は、アレイ(98)に沿って異なる角度軌跡に向けられる。アンテナアレイ(582)は、複数のアレイセグメント(592,595,596)からも形成でき、アレイ(582)のグループはアンテナ機器(571)を形成するよう合成もできる。 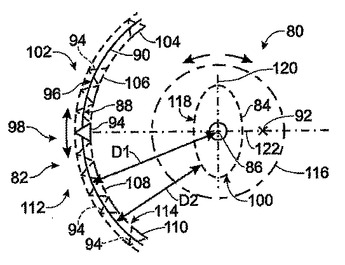 (もっと読む)
(もっと読む)
マルチRFIDアンテナによって検出される物品の位置の割り当ておよび推定方法
本発明の好ましい諸実施形態によれば、モニタリングされる一つまたは複数の品物またはオブジェクトの位置を推定するための方法(および対応する装置)が提供される。例示的な実施形態では、該方法(および対応する装置)はRFID(電波方式認識)用途(たとえば、RFIDタグを13.56MHzおよび約900MHzにおいて読み取る)において実装される。それは、複数のRFID読み取り器アンテナによってカバーされる一つまたは複数の検出領域において一意的なRFIDタグに関連付けられた品物の位置を推定することによる。 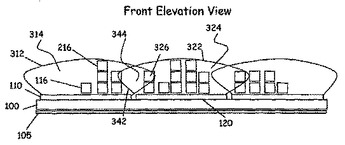 (もっと読む)
(もっと読む)
インパルス無線周波数信号による3次元画像の生成
画像マトリクスの生成は、複数の点を有する空間に関する往復時間マトリクスにアクセスするステップを有する。往復時間マトリクスは、信号が送信アンテナから点へ、更に受信アンテナへ伝わる推定往復時間を表す。空間の対象から反射された信号は、受信アンテナで受信される。以下のステップは、複数の点の少なくとも一部に対して、画像マトリクスを生成するよう繰り返される:複数の点の一部から点を選択するステップ;夫々の受信アンテナに関して、受信アンテナにより受信された信号の波形を定めて、往復時間マトリクスに従って、選択された点に対応する定められた波形の波形値を確認するステップ;及び選択された点に関して画像値を得るよう、選択された点の波形値を結合するステップ。画像マトリクスは、画像値から生成される。  (もっと読む)
(もっと読む)
強化された監視被写体撮像
撮像システム(30)が、被写体位置(46)における被写体(32)に向けてミリ波電磁放射線を送信し、その被写体(32)からミリ波電磁放射線を受信するように構成されたアンテナ装置(48)を含む。コントローラ(62)は、アンテナ装置(48)を操作し、受信された放射線を表す出力(68)を生成するように構成されたトランシーバ(64)と、トランシーバ出力(68)から、被写体(32)の画像(130)を表す画像データを生成するように適合されたプロセッサ(70)とを含む。アンテナ装置(48)によって受信された放射線を表す画像信号の少なくとも第1の部分を使用して、被写体(32)の少なくとも一部分の第1の画像(130)を表す第1の画像データが生成される。第1の画像(130)の解像度とは異なる解像度を有する第2の画像(132)を表す第2の画像データが、画像信号の少なくとも第2の部分から生成される。  (もっと読む)
(もっと読む)
強化された監視被写体撮像
撮像システム(30)が、被写体位置(46)における被写体(32)に向けてミリ波電磁放射線を送信し、その被写体(32)からミリ波電磁放射線を受信するように構成されたアンテナ装置(48)を含む。コントローラ(62)は、アンテナ装置(48)を操作し、受信された放射線を表す出力(68)を生成するように構成されたトランシーバ(64)と、トランシーバ出力(68)から、被写体(32)の画像(130)を表す画像データを生成するように適合されたプロセッサ(70)とを含む。アンテナ装置(48)によって受信された放射線を表す画像信号の少なくとも第1の部分を使用して、被写体(32)の少なくとも一部分の第1の画像(130)を表す第1の画像データが生成される。第1の画像(130)の解像度とは異なる解像度を有する第2の画像(132)を表す第2の画像データが、画像信号の少なくとも第2の部分から生成される。 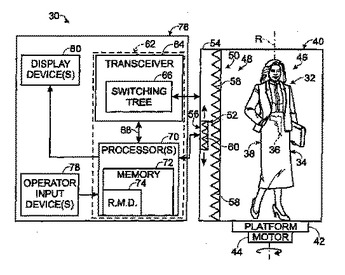 (もっと読む)
(もっと読む)
物体識別をともなう監視される被写体の撮像
撮像システム(30)が、被写体位置(46)における被写体(32)に向けてミリ波電磁放射線を送信し、その被写体(32)からミリ波電磁放射線を受信するように構成されたアンテナ装置(48)を含む。コントローラ(62)は、アンテナ装置(48)を操作し、受信された放射線を表す出力(68)を生成するように構成されたトランシーバ(64)と、トランシーバ出力(68)から、被写体(32)の画像(130)を表す画像データを生成するように適合されたプロセッサ(70)とを含むことが可能である。アンテナ装置(48)によって受信された放射線を表す画像信号の少なくとも第1の部分を使用して、被写体(32)の少なくとも一部分の第1の画像(130)を表す第1の画像データが生成される。第1の画像(130)の解像度とは異なる解像度を有する第2の画像(132)を表す第2の画像データが、画像信号の少なくとも第2の部分から生成される。 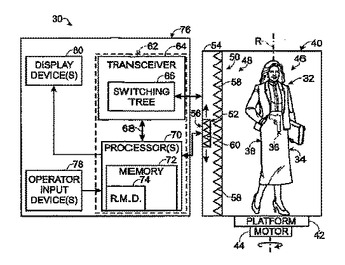 (もっと読む)
(もっと読む)
複数の情報源を有する監視ポータル
監視システム(20)は、被写体(32)を撮像するためのミリメートル波の電磁放射を用いて、人物(36)と、その人物(36)によって携行されている物体(38)とを含む被写体(32)を検問するように構成されている第1のセンサ装置(26)を含むことができる。補助情報源(30)が、人物(36)によって携行されている可能性のある物体(36)に関係付けることができる被写体(32)に関するさらなる情報を提供する。関係情報が、生成された画像信号(125)と被写体情報とを関係付ける。補助情報源(30)は、被写体位置(34)の人物(36)によって携行されている可能性のある物体(38)の所与の特性を検出するように適合されている第2のセンサ装置(26)とすることができる。次いで、所与の特性を有する物体(38)を人物(36)が携行しているかどうかに関する関係情報を生成することができる。 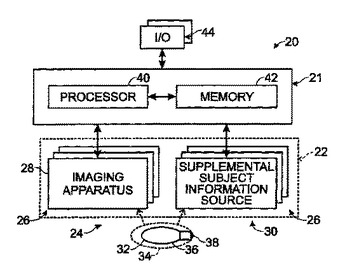 (もっと読む)
(もっと読む)
強化された監視被写体撮像
監視システム(20)が、被写体(32)を撮像するためにミリ波電磁放射線を使用して、人(36)、およびその人(36)によって保持される物体(38)を含む、被写体(32)を検問するように構成された第1のセンサ装置(26)を含むことが可能である。補助的な源(30)が、人(36)によって保持される可能性がある物体(38)に関係付けられることが可能な被写体(32)についての追加の情報をもたらす。関係情報は、生成された画像信号(125)、および被写体情報に関する。補助的な源は、第2であることが可能である。被写体位置(34)における人(36)によって保持される可能性がある物体(38)の所与の特性を検出するように適合されたセンサ装置(26)。その場合、人(36)が、所与の特性を有する物体(38)を保持しているかどうかについての関係情報が、生成されることが可能である。 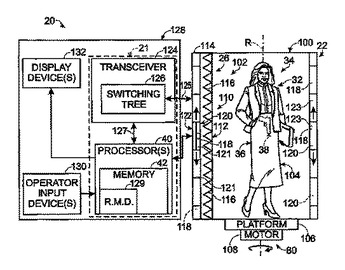 (もっと読む)
(もっと読む)
2つ以上のセンサを有する装置
本発明は、信号に対する送信機および受信機を備えた2つ以上のセンサを有しており、そのうち1つのセンサは他のセンサのクロスエコー信号を受信可能である、2つ以上のセンサを有する装置に関する。ここで本発明によれば、各センサが他のセンサの反射信号をそれぞれ別個に分離された状態で相互の障害なく受信および評価できるようにするために、各センサは受信動作において送信信号と受信信号とのあいだの時間遅延により相互に時間的に分離される。 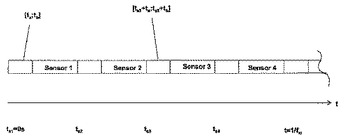 (もっと読む)
(もっと読む)
隠蔽された物体の検知
着衣の個人(22)が疑わしい隠蔽された物体(25)を携帯しているかどうかを決定するためのシステム、方法、デバイスおよび装置を開示する。この決定は、200MHz〜1THz範囲の電磁放射による検査を通じて個人(22)の画像に対応するデータを確立する工程を含む一つの形式では、反射された放射線の強度および反射する表面の深度差分に対応する画像データを受け取り処理して、疑わしい隠蔽された物体(25)を検知する。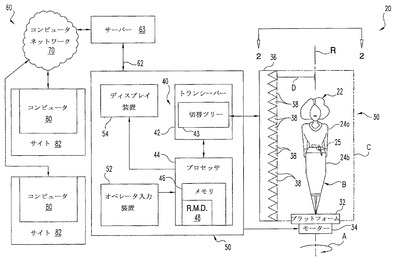
 (もっと読む)
(もっと読む)
位置情報の決定
物体(102)に関する位置情報を決定するための機器(200)であって、複数の受信エレメント(212、214、216、218)を含む、受信するための手段(210)と、受信エレメント(212、214、216、218)で受信された信号(106)を検出し、受信信号を表す出力信号を生成するための検出手段(230)と、各受信エレメント(210)ごとに、他の任意の受信エレメント(212、214、216、218)で受信される信号から生成される任意の出力信号とは別に、その受信エレメント(210)で受信される信号から生成される出力信号にプロセスを適用し、その結果、その受信エレメントで受信される信号(106)を表すパラメータのそれぞれの値を得るように動作可能な処理手段(260)とを含み、処理手段(260)はさらに、こうして得られたパラメータの値を比較し、その結果、物体に関する位置情報を取得するように動作可能な機器(200)。  (もっと読む)
(もっと読む)
処理装置および対象物検出装置
検出対象の接近に伴い変動する電気信号を生成するセンサ10に接続され、上記電気信号を処理する処理装置11であり、前記検出対象の接近に伴い変動する電気信号と前記電気信号よりも周波数の高い高周波信号とが重畳した信号から前記電気信号を抽出する手段7と、前記電気信号の波形から前記検出対象の接近を判定する手段8とを備える (もっと読む)
661 - 680 / 687
[ Back to top ]