
Fターム[5J070AE09]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 人 (687)
Fターム[5J070AE09]に分類される特許
161 - 180 / 687
波形観測装置及び方法
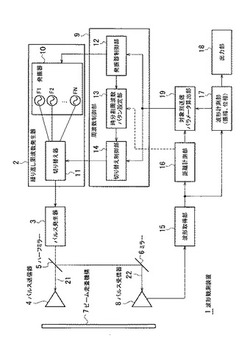
【課題】移動体を対象とした反射パルスの波形を高精度で観測することができる波形観測装置を提供する。
【解決手段】波形観測装置1は、繰り返し周波数を発生する繰り返し周波数発生器2と、繰り返し周波数でフェムト秒パルス光を発生するパルス発生器3と、フェムト秒パルス光をテラヘルツパルス波に変換して送信するパルス送信器4と、フェムト秒パルス光を励起用パルス光21と同期検波用パルス光22に分割するハーフミラー5と、ミラー6と、パルス波の方向を走査するビーム走査機構7と、反射波を受信して電流パルスに変換するパルス受信器8と、繰り返し周波数発生器2を制御する周波数制御部9と、受信波形を取得する波形取得部15と、距離計測部16と、波形計測部17と、出力部18と、対象別送信パラメータ算出部19とを備える。
(もっと読む)
測距方法及び装置

【課題】送信波の占有周波数帯域幅が電波法で規定する76MHz以内となる条件でも、最小探知距離と距離分離分解能を短くできるようにする。
【解決手段】掃引回路18から、24.05GHz〜24.25GHzの振り幅200MHzの掃引信号を出力し、スイッチ回路20ではこの掃引信号を切取り信号を用いて周波数分割して占有周波数帯域幅50MHzの4つの信号を形成し、これを送信信号として出力する。一方、受信側では、幅50MHzの送信信号で得られた4つの受信信号を入力した位相検波器23にて、送信信号と同期した周波数帯域幅200MHzの局部発振信号で検波することで、4つのビート信号を取得する。これらのビート信号は、合成するとそれぞれの波形が連続した状態となり、占有周波数帯域幅200MHzの送信信号を用いて得られるものと同等となり、近距離の測距が可能となる。
(もっと読む)
受信装置および受信方法
【課題】受信装置および受信方法を提供すること。
【解決手段】放射体から発せられた信号を受信する第1の数(3以上の整数)のアンテナと、接続されているアンテナにより受信された前記信号に対するアナログ処理を行う第2の数(2以上の整数、第2の数<第1の数)のアナログ処理部と、1のアナログ処理部と1のアンテナを接続している間、他のアナログ処理部に接続するアンテナを順次に切り替える接続切替部と、前記1のアンテナを介して前記1のアナログ処理部により得られた信号と、同一時間帯に他のアンテナを介して前記他のアナログ処理部により得られた信号との伝達関数の差分を取得する伝達関数取得部と、異なる時間帯に得られた信号に基づいて前記伝達関数取得部により得られた前記伝達関数の差分の各々に、前記他のアナログ処理部と接続されていた前記他のアンテナに対応する指向用重みを乗算する乗算部と、を備える受信装置。
(もっと読む)
背後監視装置
【課題】 身辺に携帯保持して使用し、人体の背後監視領域への車や不審者などの被監視体の立入を感知すると、迅速且つ的確に危険通報を行うことにより、日常生活上で我々の背後に立ち入る車や不審者に起因する危害の発生を防止する背後監視装置を提供する。
【解決手段】 使用者の頚部2にネックレス3が着用され、ネックレス3の背後位置には背後監視領域5に、監視電磁波6を放射する放射器7が内設され、放射器7を挟むネックレス3の領域に、監視電磁波6が背後監視領域6内に立入る不審者などの被監視体8で反射した反射電磁波10を受信する警報器11a、11bが内設され、ネックレス3の前部に、警報器11a、11bに接続され、警報器11a、11bから警報信号が入力されると通報音を発して、人体1に危険通報を行なう危険通報器12が内設されている。
(もっと読む)
不審者検知装置、不審者検知システム及び不審者検知方法
【課題】複数の不審者が侵入した場合においても、不審者の数及び不審者の位置を特定すること。
【解決手段】遅延時間変化解析部105は、広帯域なパルス信号が送信されてから、当該パルス信号が反射源により反射されて到来波として受信されるまでの遅延時間の時間的な揺らぎ(遅延時間変化)の周波数成分を抽出し、反射源判定部106は、入力される到来波の遅延時間の時間的な揺らぎ(遅延時間変化)の周波数成分に基づいて、到来波の反射源が、人体等の呼吸、心拍を伴う動体か、壁又は什器等の固定物体かを判定するようにした。また、送信パルスに広帯域なUWBパルス信号を用いることにより、時間軸上で到来波が分離されるため、エリア内に侵入した不審者を検知し、不審者の数を検出することができる。
(もっと読む)
移動物体検出装置
【課題】昆虫などの小型の移動物体の誤検出を容易に防止できる。
【解決手段】判定回路89は回転角の積算値と小型移動物体O1が受波範囲A1を通過する際に同一方向に移動する移動距離に対応して設定された閾値とを比較し、積算値が閾値未満であるときは移動物体無しと判定する。さらに判定回路89は継続時間Txと小型移動物体O1が受波範囲A1を通過する際に要するであろう時間に対応して設定された基準時間とを比較し、継続時間Txが基準時間未満であるときは移動物体無しと判定する。故にドップラー信号E,E’の継続時間Txだけではなく、ドップラー信号E,E’から算出される移動物体の移動方向や移動距離も考慮して判定するので、受波器4の近傍における受波範囲A1を移動する小型移動物体O1の誤検出を容易に防止できる。
(もっと読む)
センサネットワークシステムおよびセンサ装置
【課題】さらに高い追尾性能を実現するセンサネットワークシステムを得ること。
【解決手段】本発明は、複数のセンサ、および複数のセンサを制御する制御装置を含んだセンサネットワークシステムであって、制御装置は、センサの各々における観測結果に基づいて、どのセンサからどのような情報を出力させるかを示す情報である優先度の暫定値をセンサ毎に決定し、センサの各々は、近隣のセンサとの間で観測動作に関する情報を交換し、得られた観測動作情報に基づいて、制御装置で決定された自センサの優先度の暫定値を調整し、制御装置は、各センサで調整された後の優先度に基づいて通信帯域制御を行う。
(もっと読む)
ミリ波撮像装置およびプログラム
【課題】複数のミリ波センサを用いて被写体を撮像するミリ波撮像装置において、ミリ波センサ毎の特性のばらつきによって撮像画像が不鮮明になるのを防止する。
【解決手段】ラインセンサに被写体像を撮像させるのに先立ち、基準となるミリ波を放射するミリ波放射部からのミリ波を受信する準備段階を経て(s110〜s150)、実際に被写体像を撮像する撮像段階へと移行する(s170〜)。準備段階では、ミリ波放射部からのミリ波に基づいてミリ波センサそれぞれの検出値に対する補正値を設定しておき(s150)、撮像段階で被写体像の撮像を開始した以降は、撮像に際してミリ波センサそれぞれに検出される検出値が設定済み補正値で補正される(s190)。
(もっと読む)
受信波の相関行列算出装置及び受信波の相関行列算出方法、並びに波源方向推定装置及び波源位置推定装置
【課題】波源の帯域幅が狭い場合にも波源相互相関値を低減することができる受信波の相関行列算出装置を提供する。
【解決手段】受信波の相関行列算出装置は、アレーアンテナ24aにより電波を受信して相関行列を算出する。受信波の相関行列算出装置は、受信波の方向行列の位相を回転し、位相回転された方向行列を含む相関行列を周波数平均して平均化された相関行列を算出する。
(もっと読む)
物体検出装置
【課題】本発明は、時系列でのレーダの反射データが不安定な場合でも物体を高精度に検出することができる物体検出装置を提供することを課題とする。
【解決手段】レーダ検出手段10で検出された反射データをセグメントにグルーピングし、セグメント毎の反射データに基づいて物体を検出する物体検出装置1であって、所定の条件に基づいて反射データをセグメントにグルーピングするグルーピング手段22と、各反射データについて過去に属したセグメントの識別情報を特定するセグメント履歴特定手段23と、今回グルーピングされたセグメントに属する反射データの過去のセグメントの識別情報に基づいて、今回グルーピングされたセグメントと過去にグルーピングされたセグメントとの同一性を判別するセグメント識別手段23とを備えることを特徴とする。
(もっと読む)
受信波の相関行列算出装置及び受信波の相関行列算出方法、並びに波源方向推定装置及び波源位置推定装置
【課題】波源の帯域幅が狭い場合にも波源相互相関値を低減することができる受信波の相関行列算出装置を提供する。
【解決手段】受信波の相関行列算出装置は、アレーアンテナ24aにより電波を受信して相関行列を算出する。受信波の相関行列算出装置は、受信波の各周波数における方向行列を所定の周波数における方向行列へ変換し、所定の周波数における方向行列の位相を回転し、位相回転された方向行列を周波数平均して平均化された相関行列を算出する。
(もっと読む)
車載レーダ装置
【課題】自車が停車もしくは所定の速度以下の際に、放射するパルスの送信波の電力を下げるように制御すると、受信信号の受信レベルが小さくなるためS/Nが小さくなり、目標物体が検知しにくくなる。
【解決手段】目標物体30に向けて送信部11からパルスの電波を送信し、受信部12により目標物体で反射した電波を受信して、目標物体までの距離等を算出する信号処理手段13を備えた車載レーダ装置において、受信部で受信した信号から1/f雑音を抑えるノイズ除去手段123を設けると共に、自車が停車もしくは所定の速度以下の際に送信部から送信するパルスの電波の平均電力を低下させる電力制御手段112、115を設け、自車が停車もしくは所定速度以下の際に送信電力を低下させることに伴い受信信号のS/Nが低下するのを防ぎ、かつ電力消費を必要最小限に抑える。
(もっと読む)
車両用外界認識装置及びそれを用いた車両システム
【課題】安全性確保と処理負荷低減の両立を図ることができる車両用外界認識装置及び車両システムを提供する。
【解決手段】車両用外界認識装置100は、自車の予測進路と自車前方の検知物体の情報に基づいて自車が検知物体に衝突する危険度を演算する第1の衝突判定手段103と、検知物体が予測進路の外から予測進路内に進入するか否かを判定する第2の衝突判定手段104を有する。そして、複数の検知物体の中から、危険度が第1の閾値以上である検知物体と、予測進路内に進入すると判定された検知物体とを選択候補物体として選択し、その選択された複数の選択候補物体の中から、自車との相対距離が最小となる選択候補物体を歩行者判定要求物体として選択する物体選択手段105を有する。そして、その選択された歩行者判定要求物体に対して画像情報を用いて歩行者か否かを判定する歩行者判定手段106を有する。
(もっと読む)
車両用物体検知装置
【課題】物体が横方向から自車進行方向に進入するような場合、物体の移動速度を精度良く算出するようにした車両用物体検知装置を提供する。
【解決手段】自車進行方向にレーザ光を発射すると共に、受信された反射波から検知エリア内の反射物の検出点を抽出し、複数の検出点が抽出されるとき、複数の検出点をクラスタリングして反射物を1個の物体として検出し(S10からS12)、検出された物体が自車進行方向に横方向から進入するとき、検知エリア内に完全に入っているか否か判定し(S16)、検出された物体が検知エリア内に完全には入っていないと判定されるとき、複数の検出点のうちの物体の移動方向において先端側または後端側の検出点を選択してそれに基づいて物体の移動速度を算出する一方(S18)、完全に入っていると判定されるとき、複数の検出点のうちの中央の検出点を選択して移動速度を算出する(S20)。
(もっと読む)
無線センサ装置
【課題】移動体の有無と、移動体が存在する場合にはその移動体の方位とを同時に検知できる無線センサ装置を提供すること。
【解決手段】第1、第2及び第3の送受信アンテナ1L,1C,1Rと、第1、第2及び第3の検出用ダイオード3L,3C,3Rと、これら送受信アンテナ1L,1C,1R及び検出用ダイオード3L,3C,3Rにそれぞれパルス信号を供給するパルス発生器2と、第1の検出用ダイオード3Lの出力信号と第3の検出用ダイオード3Cの出力信号とが入力する第1の差動増幅回路4と、第2の検出用ダイオード3Rの出力信号と第3の検出用ダイオード3Cの出力信号とが入力する第2の差動増幅回路5と、第1の差動増幅回路4の出力信号と第2の差動増幅回路5の出力信号との和信号を検出する加算器11と、第1の差動増幅回路4の出力信号と第2の差動増幅回路5の出力信号との差信号を検出する減算回路12とを具備した無線センサ装置である。
(もっと読む)
車両用物体検知装置
【課題】高反射物体と低反射物体とを精度良く識別して歩行者などの低反射物体の検出が遅れることのないようにした車両用物体検知装置を提供する。
【解決手段】電磁波で水平方向をスキャンして反射レベルが検知しきい値を超える反射波に基づいて物体を検出すると共に(S10)、レイヤで反射レベルが検知しきい値より高く設定された高反射物検知しきい値を超える高反射波があるか判定し(S14)、肯定されるとき、他のレイヤの検知方向に低反射波があるか判定し(S16)、肯定されるとき、低反射波に相当する低反射物体を高反射波に相当する高反射物体とは別の物体と識別する一方(S18)、否定されるとき、検知しきい値を上げると共に、電磁波のスキャン方向を水平方向から垂直方向に変更させ、高反射物体が検出された場所を除く、その近傍を再スキャンさせ、高反射物体とは別の物体と識別する(S20)。
(もっと読む)
侵入物識別装置
【課題】自然環境が変化しても、侵入者の侵入を識別する。
【解決手段】
無線送信回路10は所定の送信信号を無線送信し、無線受信回路は送信された送信信号を受信信号として受信し、複素復調信号に復調する。特徴抽出器16は、期間長ΔTをそれぞれ有する解析期間Ta1〜TaNにおいて複素復調信号の特徴を表す特徴量パターンFmax,Fminを抽出する。識別器17は特徴量パターンFmax,Fminに基づいて、侵入物の侵入時を表す参照特徴量パターンと、侵入者の非侵入時を表す参照特徴量パターンとを用いて、検知領域に侵入者が侵入したか否かを識別する。
(もっと読む)
支障物検知システムおよび支障物検知装置
【課題】支障物検知装置の検知精度を向上させる。
【解決手段】支障物監視区域の両側に敷設された漏洩同軸ケーブル101,102、および前記両側に敷設された漏洩同軸ケーブルのうち一方の漏洩同軸ケーブルから他方の漏洩同軸ケーブルに向けて電波を放射させ前記他方の漏洩同軸ケーブルに入射した電波に基づいて前記支障物監視区域内の支障物を検知する支障物検知装置を備えた支障物検知システムであって、前記支障物検知装置における前記一方の漏洩同軸ケーブルへ前記電波を送信する電波送信手段と前記支障物検知装置における前記他方の漏洩同軸ケーブルが入射した電波を受信する電波受信手段とを繋ぐ手段110を備えている。
(もっと読む)
接近検知システム
【課題】ターゲットがどのような位置に存在していても、これを確実に検知することのできる接近検知システムを得る。
【解決手段】センサ100a、同軸ケーブル202a,212a、漏洩ケーブル201a,211a、終端器203a,213aからなる一方の組と、センサ100b、同軸ケーブル202b,212b、漏洩ケーブル201b,211b、終端器203b,213bからなる他方の組とを備える。3次元位置計測手段500は、センサ100a,100bで求められたターゲット400の電波送受信手段200a,200bの長手方向の距離Z1,Z2と、電波送受信手段200a,200bから離れる方向への距離R1,R2とに基づいて、ターゲット400の3次元位置を求める。
(もっと読む)
水栓装置
【課題】 電波センサから放射される電波を導波管を通じて吐水空間に電波を放射することにより、スパウトや受水部の形に関係なく被洗浄物を検知することを可能とする。
【解決手段】 本発明では、吐水部であるスパウト内部に導波管と水路配管を構成し、吐水口から吐水空間に向かって電波を放射させているため、吐水口近傍の電波強度が最も強くなり、被洗浄物が吐水口に向かって近づく状態を検知したいエリアと、洗面行為以外の検知したくないエリアとの電力差を大きくすることができ、使い勝手がよく、誤検知の少ない水栓装置を提供することができる。
(もっと読む)
161 - 180 / 687
[ Back to top ]