
Fターム[5J070AF01]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 固定設置 (685)
Fターム[5J070AF01]に分類される特許
21 - 40 / 685
侵入検知システム、侵入検知装置、侵入検知方法および侵入検知プログラム
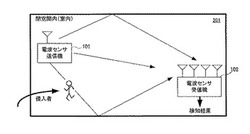
【課題】電波を用いて所定エリアにおける人間の侵入を検知する構成において、検知可能エリアが狭くなることを防ぐことが可能な侵入検知システム、侵入検知装置、侵入検知方法および侵入検知プログラムを提供する。
【解決手段】侵入検知システム201は、所定エリアに配置され、無線信号を送信するための送信機101と、所定エリアに配置され、送信機101から送信された無線信号を受信し、受信した無線信号に基づいて所定エリアにおける空間特徴量を算出し、算出した空間特徴量に基づいて所定エリアにおける人間の動作を検知するための受信機102とを備える。送信機101は、無線信号の指向性パターンを選択可能であり、複数の指向性パターンの中から、受信機102が受信する無線信号のレベルが最も小さくなる指向性パターンを選択する。
(もっと読む)
侵入検知装置、侵入検知方法、侵入検知プログラムおよび侵入検知システム

【課題】電波を用いて所定エリアにおける人間の侵入を検知する構成において、使用すべき電波と同一または近接する周波数帯の他の電波が多数存在する場合でも、誤検知を抑制する。
【解決手段】侵入検知装置101は、所定エリアにおける複数の装置から送信される無線信号の中から対象無線信号を選択的に受信するための受信部22と、受信部22によって受信された対象無線信号に基づいて所定エリアにおける空間特徴量を算出するための空間特徴量算出部11と、空間特徴量算出部11によって算出された空間特徴量に基づいて所定エリアにおける人間の動作を検知するための検知部12と、対象無線信号が送信されるタイミングを制御するためのタイミング制御部14とを備える。受信部22は、タイミング制御部14によって制御されたタイミングに従って、無線信号の中から対象無線信号を選択的に受信する。
(もっと読む)
移動検知システム
【課題】 子機の移動を精度良く検知することができる移動検知システムを提供する。
【解決手段】 親機4と、親機4との間で電波信号を送受信する子機6と、を備える。親機4は、子機6との間で送受信する電波信号の強度レベルの変化に基づいて、子機6の移動を検知するように構成されている。また、親機4と子機6との間で送受信される電波信号を弱める又は遮断するための電波信号遮断手段34が設けられている。子機6が検知エリア16に位置するときには、親機4と子機6との間における電波信号の送受信が可能であり、子機6が検知エリア16に隣接する非検知エリア20に位置するときには、親機4と子機6との間で送受信される電波信号は、電波信号遮断手段34によって弱められ又は遮断される。
(もっと読む)
被災者救助支援システム、情報処理方法
【課題】地域や場所の制限無く利用が可能であって、迅速かつ効率的に被災者の位置を特定することのできる被災者救助支援システムを提供する。
【解決手段】被災地には複数のポータブル基地局が設置される。ポータブル基地局は、被災者が所持するRFIDタグとUWB−IRによる通信を行ってタグIDと位置推定のためのパラメータから成る位置パラメータ情報を生成し、これを測位サーバに送信する。測位サーバは、ポータブル基地局から送信された位置パラメータ情報により、RFIDタグ100ごとの位置を推定して記憶する。
(もっと読む)
電磁波計測装置、電磁波計測システムおよび電磁波計測方法ならびに構造体の外形状設計方法
【課題】近傍界にて計測した電磁波散乱データを用いて遠方界での電磁波散乱を精度良く評価できる電磁波計測装置を提供する。
【解決手段】電波吸収材4を備えた筐体3と、筐体3内に設けられ、縮小模型とされた航空機模型15が設置される計測領域11に球面波電磁波を送信するとともに散乱波を受信するNFアンテナ5と、筐体3内に設けられ、球面波電磁波を波電磁波に変換するコンパクトレンジ9を備え、変換された波電磁波を計測領域11に送信するとともに散乱波を受信するFFアンテナ7と、NFアンテナ5によって得られた計測データを、FFアンテナ7によって得られた計測データと対比可能なデータに変換するデータ変換手段を備えている。
(もっと読む)
人位置検索システム
【課題】命の危険が迫っている人の位置を特定することができる人位置検索システムを提供する。
【解決手段】本発明の人位置検索システム10は、複数の基地局30で測定した電波の送信から受信までの所要時間より、ユーザが身に付けているセンサ端末20の位置を特定し、特定した位置に、センサ端末20から送信されたユーザの生体情報を対応付けて管理する。
(もっと読む)
システム及びプログラム
【課題】 警報対象の存在を報知した場合に、ユーザがそれを見落とすことなく知ることができるシステムを提供すること
【解決手段】 警報報知する手段として、表示部5に加えてカラーLED22を光源とする発光部を設ける。制御部18は、条件を満たした場合に、LEDを光源とする発光部の発光状態を制御して警報報知をする。このとき、発光状態の制御は、警報条件を満たした警報対象に対応した発光色で発光する。
(もっと読む)
処理装置
【課題】ATCRBSトランスポンダが送信した応答信号がモードAコード又はモードCコードのいずれであるかを容易に識別する。
【解決手段】処理装置は、入力手段と、測位手段と、変換手段と、判定手段とを備える。入力手段は、受信装置が受信したATCRBSトランスポンダを搭載する航空機から送信された応答信号及び受信装置における当該応答信号の受信時刻を複数の受信装置から入力する。測位手段は、入力した応答信号及び受信時刻から、同一の応答信号の各受信装置での受信時刻を利用し、当該応答信号を送信した航空機の座標及び高度を特定する位置を測位する。変換手段は、入力した応答信号を高度に変換する。判定手段は、測位された位置に含まれる航空機の高度と、応答信号から変換された高度とが所定の相関範囲内であるとき当該応答信号はモードCコードであり、所定の相関範囲内でないとき当該応答信号はモードAコードであると判定する。
(もっと読む)
二次監視レーダ
【課題】航空機の監視に加え、気象情報を容易に収集する。
【解決手段】モードS二次監視レーダは、航空機に質問信号を送信し、当該質問信号に応答して航空機から送信された応答信号を受信して航空機の飛行を監視する二次監視レーダであって、送信手段と、受信手段と、気象情報取得手段と、位置特定手段と、出力手段とを有する。送信手段は、ロールコール期間にGICBレジスタの気象情報の送信要求を含む質問信号を送信する。受信手段は、航空機から質問信号に応じて送信された応答信号を受信する。気象情報取得手段は、前記受信手段が受信した応答信号から、GICBレジスタの気象情報を取得する。位置特定手段は、前記受信信号が受信した応答信号から、航空機の位置情報を特定する。出力手段は、前記気象情報取得手段で取得された気象情報を、前記位置特定手段で算出された位置情報と関連づけて出力する。
(もっと読む)
広域マルチラテレーションシステム及び受信装置
【課題】航空機から送信される信号を効率的に検出する。
【解決手段】広域マルチラテレーションシステムで利用される前記受信装置は、質問受信部と、質問信号解析部と、応答受信部と、利得調整部と、出力部とを備える。質問受信部は、二次監視レーダから航空機に送信された質問信号を受信する。質問信号解析部は、前記質問受信部で受信した質問信号から、前記二次監視レーダが質問を送信するタイミングを求める。応答受信部は、航空機から送信された信号を受信する。利得調整部は、前記応答受信部で受信された信号に、前記質問信号解析部で求められたタイミングに応じて信号の利得を調整する。出力部は、前記利得調整部で利得が調整された信号を航空機の位置の測定に使用するデータとして前記位置測定装置に出力する。
(もっと読む)
踏切障害物検知装置
【課題】送信部及び受信部を内部に収容する筐体の電波透過部に付着した付着物(雪、水滴、塵など)に起因する信号レベルの低下及びこれに伴う検知漏れを抑制し、踏切道内における障害物の有無を安定して検知することのできる踏切障害物検知装置を提供する。
【解決手段】踏切障害物検知装置は、送信部から電波透過部を介して電波を送信するとともに送信された電波の反射波を前記受信部によって受信し、受信された反射波に基づいて踏切道内における障害物の有無を検知する。踏切障害物検知装置は、筐体内に付着物除去手段としての振動発生部を有する。そして、送信部による電波の送信が可能な領域内に存在する特定の固定物による反射波の信号レベルを監視し、監視された反射波の信号レベルが所定の判定レベルよりも低下すると、振動発生部を駆動して電波透過部を振動させる(ステップS1〜S3、S5)。
(もっと読む)
遠隔ロケーションにおけるRFIDベースの誘導
【課題】区域内でユーザを位置特定するため、および誘導するための誘導位置特定システム等を提供する。
【解決手段】クエリ信号40を送信し、応答信号42を受信するように構成されたRFID(無線周波数識別)読取りデバイス14と、区域内に配置されたRFIDタグ8を含む。RFIDタグは、その区域内のRFIDタグのロケーションに関連付けられた固有の情報を格納する。RFIDタグのそれぞれは、RFID読取りデバイスからクエリ信号を受信し、その固有の情報を伝送する応答信号をRFID読取りデバイスに送信するように構成される。RFID読取りデバイスは、応答信号を利用して、その区域内のそのRFID読取りデバイスの現在のロケーションを特定するように構成される。
(もっと読む)
二次監視レーダ及び監視方法
【課題】拡張スキッタを利用して、航空機の捕捉の精度を向上する。
【解決手段】第1トラックファイル生成手段と、第2トラックファイル生成手段と、抽出手段と、抽出手段が抽出した航空機に送信する質問を生成する質問生成手段と、生成した質問を送信する送信手段とを備える。第1トラックファイル生成手段は、航空機から送信された拡張スキッタに含まれる航空機の識別子及び当該航空機の位置と、計時手段から取得した受信時刻とを関連付けて第1トラックファイルデータに追加する。第2トラックファイル生成手段は、航空機から送信された応答に含まれる航空機の識別子及び当該航空機の位置と、受信時刻とを関連づけて第2トラックファイルデータに追加する。抽出手段は、第1トラックファイルデータに含まれる位置及び受信時刻と、第2トラックファイルデータに含まれる位置及び受信時刻とを利用して、所定の位置に存在する航空機を抽出する。
(もっと読む)
レーダ装置及び監視方法
【課題】航空機の予測位置を正確に特定し、捕捉する。
【解決手段】モードS二次監視レーダは、航空機データ記憶部と、質問生成部と、算出部と、更新部とを備える。航空機データ記憶部は、次のスキャンにおける航空機の位置情報である予測位置を含む航空機データを記憶する。質問生成部は、ロールコール期間において、航空機データに含まれる航空機に対し、ロールコール質問又は航空機に搭載されるトランスポンダのGICBレジスタのパラメータを含む応答の送信を要求する要求信号を生成し送信手段に出力する。算出部は、受信手段がロールコール質問に対して受信した応答に含まれる航空機の位置又はGICBレジスタのパラメータに含まれる航空機の動態情報から当該航空機の予測位置を算出する。更新部は、算出部で算出された予測位置で航空機データを更新する。
(もっと読む)
自動水栓装置
【課題】電波センサを用いた自動水栓装置であって、簡易な構成により、誤吐水及び誤止水を生じることのない自動水栓装置を提供する。
【解決手段】水栓本体1Aと、水管20と、電波センサ40と、洗浄水の吐水と止水を行う制御部50を備えた自動水栓装置1において、電波を外部に放出するために吐水口部に形成された電波放射口27と、電波放射口27から放射される電波の指向性を決定するための指向性決定手段を備え、制御部50は、電波センサ40の検出信号が所定の閾値以上である場合に吐水を行う制御を行い、指向性決定手段は、検知物体が差し入れられた際の電波センサ40の検出信号が制御部50の閾値以上となる検知範囲を決定すると共に、止水中における検知範囲が、吐水口26から吐水される洗浄水の吐水方向Aに沿って延びる細長い形状となるように、電波放射口27から放射される電波の指向性を決定する。
(もっと読む)
給水装置
【課題】使用者の用途に応じた吐水形態の切替を可能とする給水装置を提供する。
【解決手段】給水経路から給水された水を吐出する吐水口と、給水経路に接続された電磁弁と、検知物を検知する第1及び第2の検知手段と、第1の検知手段が検知物を検知している間は前記電磁弁を開弁して、非検知となると電磁弁を閉弁する第一の自動モード運転を行い、また、第2の検知手段が検知する度に電磁弁の開閉を繰り返す第二の自動モード運転を行う制御部と、を備えた給水装置において、制御部は、第二の自動モード運転の運転時間を記憶する記憶部を備え、第二の自動モード運転中に前記記憶部に記憶した運転時間を経過すると前記電磁弁を閉弁する。
(もっと読む)
自動水栓装置
【課題】電波の導波経路からの電波の漏れを無くして、誤検知を発生しない自動水栓装置を提供する。
【解決手段】吐水口、及び取付面に設置するための取付部、を有するスパウト本体と、スパウト本体内に隣接して配置された通水路及び導波路と、導波路を通して電波を送受信する電波センサであって、取付部に対して吐水口とは反対側にスパウト本体から露出した状態で導波路の端部に取り付けられており、導波路の端部に取り付けられた状態で取付面のスパウト取付孔を通過可能に構成された電波センサと、が一体的に組合わされたスパウトユニットと、電波センサの検知信号に基づいて、通水路に接続された電磁弁を駆動して吐水口からの洗浄水の吐水及び止水を実行する制御部と、を有する自動水栓装置。
(もっと読む)
レーダ試験装置
【課題】
飛翔体に搭載された合成開口レーダが撮像したレーダ画像の絶対校正等に用いられるレーダ試験装置を提供することを目的とする。
【解決手段】
飛翔体に搭載された合成開口レーダの校正に用いるレーダ試験装置であって、レーダ試験装置は、合成開口レーダとの間でパルス電波の送受信を行うアンテナ部と、アンテナ部で受信したパルス信号に対する処理を実行する処理部と、を備えており、アンテナ部で受信したパルス信号に、処理部における遅延時間に対応する時間進みを与えることで、処理部における遅延時間を相殺する、レーダ試験装置である。
(もっと読む)
踏切障害物検知装置
【課題】周囲温度の変化等にかかわらず踏切道内における障害物の有無を安定して検知することのできる踏切障害物検知装置を提供する。
【解決手段】踏切障害物検知装置1は、踏切道10を含む検知領域内に電波を送信するとともに、この送信した電波に対する反射波を受信する送受信機2,3と、送受信機2,3によって受信された反射波の信号レベルと、あらかじめ設定された閾値とを比較して踏切道10内における障害物の有無を判定する信号処理部6と、を含む。信号処理部6は、送受信器2,3による電波の送信が可能な領域内に存在する特定の固定物(例えば反射板4a,5a)による反射波の信号レベルを監視し、この監視された反射波の信号レベルが変動した場合に送受信器2,3によって受信された反射波の信号レベル又は上記閾値を補正する。
(もっと読む)
追尾アンテナ装置の調整方法、及び追尾アンテナ装置
【課題】モノパルス追尾では、受信信号から生成した和信号と差信号を用いて方位角および仰角誤差を検出するが、和信号と差信号の群遅延差により誤りが生じる。この誤りを避けるためアンテナ追尾回路を校正する必要があるが、校正信号として連続波などの狭帯域な信号を用いた場合、位相の不定性により群遅延の補正に問題が生じる。
【解決手段】追尾アンテナの主反射鏡4上の仰角軸上の既知の位置に調整用アンテナ12を設置し、PSK変調波の調整用信号20を放射する。この時、調整用信号20とアンテナ指向方向の方位角は一致するため方位角誤差信号が0となるはずであり、アンテナ追尾回路の校正では和信号15と差信号16の群遅延差を可変遅延回路22、23で補正することでこれを0に調整する。
(もっと読む)
21 - 40 / 685
[ Back to top ]