
Fターム[5J070AF01]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 固定設置 (685)
Fターム[5J070AF01]に分類される特許
41 - 60 / 685
追尾アンテナ装置の調整方法、及び追尾アンテナ装置
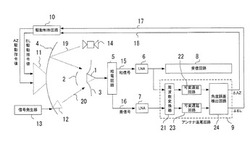
【課題】モノパルス追尾では、受信信号から生成した和信号と差信号を用いて方位角および仰角誤差を検出するが、和信号と差信号の群遅延差により誤りが生じる。この誤りを避けるためアンテナ追尾回路を校正する必要があるが、校正信号として連続波などの狭帯域な信号を用いた場合、位相の不定性により群遅延の補正に問題が生じる。
【解決手段】追尾アンテナの主反射鏡4上の仰角軸上の既知の位置に調整用アンテナ12を設置し、PSK変調波の調整用信号20を放射する。この時、調整用信号20とアンテナ指向方向の方位角は一致するため方位角誤差信号が0となるはずであり、アンテナ追尾回路の校正では和信号15と差信号16の群遅延差を可変遅延回路22、23で補正することでこれを0に調整する。
(もっと読む)
移動体情報計測装置及び移動体情報計測方法

【課題】複数の車両等の移動体が、道路のような移動路上を移動する際、個々の移動体の情報を正確に求めることができる移動体情報計測装置及び移動体情報計測方法を提供する。
【解決手段】移動体情報計測装置は、移動路の路面上方に設けられた第1センサを用いて、計測領域を通過する個々の移動体の通過開始時刻及び通過終了時刻を含む通過情報を検知し、さらに、前記計測領域に対して前記移動体の移動方向の上流側あるいは下流側の領域において個々の移動体の位置と移動速度を含む移動情報を、第2センサを用いて検知する。このとき移動体情報計測装置は、検知された前記移動情報から、移動体が前記計測領域を通過する、あるいは通過した通過時刻を算出し、この通過時刻を用いて、前記移動情報を前記通過情報と照合することにより、前記通過情報と前記移動情報とを関連付け、関連付けた前記通過情報と前記移動情報とを用いて個々の移動体の情報を求める。
(もっと読む)
気象情報提供システム及び気象情報提供方法
【課題】ドップラエコーがない領域に存在する目標の風向風速情報を取得することができ、目標の離発着時のより品質の高い気象情報に特化した観測を行うことも可能であり、得られた風向風速情報を有効に伝えることができるようにする。
【解決手段】空港観測用に特化した、ブラッグ散乱エコー対応の気象レーダ13を用い、ASR/SSR11で検出される航空機の位置・高度情報に対応する降雨及び風向風速情報を取得し、さらに気象予測モデル処理装置14から位置・高度情報に対応する気象予測情報を取得して、それぞれターゲットレポート情報に付加し、当該レポート情報を管制官、パイロットへ適切に送信する。
(もっと読む)
二次監視レーダ装置及びそのデータ処理プログラム
【課題】信頼性が高く、誤りの少ない高度情報を得ることができる二次監視レーダ装置を提供する。
【解決手段】実施形態の二次監視レーダ装置は、航空機に搭載されるトランスポンダに対して、高度情報を得るための質問信号を複数回連続して送信する送信部と、質問信号に応答してトランスポンダから送信される複数の応答信号を受信する受信部と、受信した複数の応答信号のデータを、複数の高度データにそれぞれ変換するコード変換部と、複数の高度データのうちの連続する第1及び第2の高度データにおいて、後に受信された第2の高度データが示す第2の高度が、先に受信された第1の高度データが示す第1の高度に対して所定の許容範囲内にある場合に、第1及び第2の高度データは相関があると判定し、第2の高度を前記航空機の高度情報として出力する、データ処理部と、を備える。
(もっと読む)
受信装置
【課題】マルチパス環境においても良好な受信性能が得られる受信装置を得ること。
【解決手段】本発明は、航空機に搭載されたトランスポンダより送信されたモードS信号を受信する受信装置であって、受信データをオーバサンプルし、連続または非連続な複数のビット区間における全サンプル結果について、受信電力に基づき量子化を行い、量子化後の各サンプル結果のパターンを、予め用意しておいた、取りうるサンプルパターンにそれぞれに対応するビット判定値が示されたテーブルと比較してビット判定を行う。
(もっと読む)
精測進入レーダ、精測進入レーダ制御方法およびその制御用プログラム
【課題】着陸誘導対象機の検出を安定して実施する。
【解決手段】ASR40から取得した追尾目標データDおよびSSR50から取得した追尾目標データEに基づいて進入機情報をレーダ表示手段30に表示し、オペレータによって誘導対象機が選択されると選択された航空機の進入機情報に基づいて目標物検出手段10で検出する対象機のドップラ周波数の予測値および予測位置を追尾管理制御部21が算出し、算出したドップラ周波数が中心周波数となるようなフィルタ係数をフィルタ係数制御部14が算出し、フィルタ係数制御部14が算出したフィルタ係数を目標物検出フィルタ11に設定する。追尾管理制御部21は、電波の送信方向が予測位置に向くように設定された電子走査式アンテナ1を介して電波を出力すると共に電波の反射を受信する。受信した反射波から目標物検出フィルタ11で航空機の反射信号である目標物信号を抽出する。
(もっと読む)
ドップラーセンサ及び該ドップラーセンサを用いた照明器具
【課題】 誤検出が抑えられるドップラーセンサ及び該ドップラーセンサを用いた照明器具を提供する。
【解決手段】 ドップラー信号のスペクトルから所定の背景スペクトルを減じた差分スペクトルにおいて、強度が最も高い第1ピーク周波数を用いたスペクトル分析が行われる。すなわち、図1(b)のように第1ピーク周波数の次に強度が高い第2ピーク周波数と第1ピーク周波数との一方が他方の整数倍となった場合、周期的なノイズによる誤検出であって人体は存在しないと判定される。また、図1(c)のように強度の積分の値が第1ピーク周波数の低周波側において高周波側よりも低くなった場合、移動物体は雨滴であって人体は存在しないと判定される。そして、上記のいずれにも該当しない図1(a)のような場合にのみ、人体が存在すると判定される。上記動作により、周期的なノイズや雨滴による誤検出が抑えられる。
(もっと読む)
電波発射源検出センサ及び自動料金収受システム
【課題】所定のレーンに設置された路側器と、その隣接レーンに存在する車載器との間で確立された誤通信を中断し、車載器に対する誤課金を防止することが可能な電波発射源検出センサと、このセンサを用いた自動料金収受システムとを提供する。
【解決手段】第1及び第2のレーンに設置され、移動体に所持された応答器と通信を行う第1及び第2の路側器と接続する電波発射源検出センサは、アンテナ部、検波部、方向特定部、誤通信判定部を具備する。アンテナ部は、第1及び第2のレーンを含む受信ビームにより、応答器からの応答信号を受信する。検波部は、応答信号から必要信号を検波する。方向特定部は、検波結果に基づいて、電波強度、到来方向及び応答周波数を取得する。誤通信判定部は、電波強度、到来方向及び応答周波数に基づき、応答器との通信は誤りであるとの旨の誤通信通知を第1及び第2の路側器へ出力する。
(もっと読む)
レーダ装置
【課題】物標がアンテナのメインローブ方向に在るのか、あるいはサイドローブ方向に在るのかを比較的簡易な構成で判別できるようにしたレーダ装置を提供すること。
【解決手段】信号処理部100は、サイドローブの指向特性が異なる2つの受信アンテナRA1,TA2を選択的に切り替えて物標との距離を算出し、算出した距離が同一距離であって、その距離の算出の基礎とした各受信アンテナの受信レベルの差を判定する。
(もっと読む)
移動物体検出装置及びインターホン装置
【課題】 人物が近づいてきた場合及び離れる動作を的確に検出し、単純な出力信号により判定結果を出力する移動物体検出装置を提供する。
【解決手段】 ドップラーセンサ部14aのI相出力及びQ相出力から相互の位相差を演算し、求めた位相差を正負何れかの極性の電圧情報で出力する位相差演算処理部41と、この出力する電圧の絶対値が所定値以下である場合は電圧信号を出力しない不感帯処理部42と、この出力電圧情報が負の極性を有する場合は近づく物体があると判断して「H」信号を第1出力部43aから出力し、正の極性を有する場合は離れる物体があると判断して「H」信号を第2出力部43bから出力する一対のコンパレータ52a,52bと、不感体処理部42が出力する電圧の変化を正極の電圧変化とするためにオフセット電圧を加える加算回路51とを設けた。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】目標の誤追尾を防止して、追尾精度を高めることができるようにする。
【解決手段】センサ1により特定されたプロットに対する類別処理を実施するプロット類別処理部2と、プロット類別処理部2から出力されたプロットの類別結果等を参照して、そのプロットの重心位置を追尾航跡の更新処理に使用するか否かを判定するプロット使用判定処理部3とを設け、追尾処理部4が、プロット使用判定処理部3によりプロットの重心位置を追尾航跡の更新処理に使用する旨の判定が行われた場合、そのプロットの重心位置を用いて追尾航跡を更新し、使用しない旨の判定が行われた場合、そのプロットの重心位置を用いずに追尾航跡を更新する。
(もっと読む)
侵入検知装置、侵入検知方法および侵入検知プログラム
【課題】人間の動作を高精度に検知することが可能な侵入検知装置、侵入検知方法および侵入検知プログラムを提供する。
【解決手段】侵入検知装置101は、所定エリアの状態を示す空間特徴量を算出するための空間特徴量算出部1と、空間特徴量算出部1によって算出された空間特徴量の時間的変化を算出するための変化レート算出部2と、変化レート算出部2によって算出された時間的変化に基づいて、所定エリアにおける人間の動作を検知するための検知部11とを備える。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】移動体が雷雲などの進入禁止域を回避するために経路が変更される場合でも、移動体の将来位置などを高精度に推定することができるようにする。
【解決手段】進入禁止域衝突判定部13により経由点指向経路が進入禁止域内に入る経路であると判定された場合、その進入禁止域内への進入を回避するために必要な進入回避用の加速度を算出する回避用加速度算出部14と、回避用加速度算出部14により算出された進入回避用の加速度と追尾処理部1により算出された状態ベクトルxkを用いて、移動体が進入禁止域内に入らずに経由点に至る回避経路を特定する回避経路特定部15とを設ける。
(もっと読む)
レーダ装置及び質問送信方法
【課題】他局のレーダ装置と連携して確実に目標を検出できるようにする。
【解決手段】本実施形態に係るレーダ装置1Aは、自局覆域と一部の覆域が重なる他局のレーダ装置1Bと通信回線を介して接続され、アンテナ11から目標に質問信号を送信し、目標からの応答信号を受信する送受信部12と、他局から目標の位置情報を通信回線を介して取得する通信処理部14と、通信処理部14により取得された目標の位置情報に基づいて上記一部の覆域から一定幅の外側領域に目標が進入するタイミングで質問信号を送信させる質問制御部14とを具備する。
(もっと読む)
航空機位置測定システム、受信局、データ量削減方法およびプログラム
【課題】通信コストの低減と中央局の負荷の低減とを実現する。
【解決手段】複数の種類の信号のそれぞれを航空機へ向けて送信する送信局と、複数の種類の信号のそれぞれに対する複数の種類の応答信号のそれぞれを航空機から受信し、解読処理して測定用データを生成し、生成した測定用データに受信時刻情報を付与して送信する複数の受信局と、複数の測定用データを受信し、それらに付与された複数の受信時刻情報と、複数の受信局のそれぞれの位置情報とに基づいて航空機の位置を測定する中央局とを有する航空機位置測定システムにおいて、送信局は、中央局にて決定された時刻に基づいた時刻に複数の種類の信号のそれぞれを送信し、複数の受信局のそれぞれは、所定の種類の信号を送信する時刻として中央局にて決定された時刻に基づいて時間帯を設定し、所定の種類の信号に対する応答信号を上記の時間帯以外の時刻に受信した場合、当該受信した応答信号を破棄する。
(もっと読む)
二次監視レーダ
【課題】オールコール期間にモードS応答の多重検出が発生した場合にも他の航空機の検出率の低下を防止する。
【解決手段】二次監視レーダは、捕捉機リスト記憶部と、指定機リスト記憶部と、送信手段と、判定手段と、更新手段とを備える。送信手段は、オールコール期間には一括質問を送信し、ロールコール期間にはロールコール捕捉機リストおよびロールコール指定機リストに登録される航空機に個別質問を送信する。判定手段は、一括質問に対して受信した応答に含まれるモードSアドレスがロールコール捕捉機リストに含まれているか否かを判定する。更新手段は、判定手段の結果により、当該航空機のモードSアドレスを追加して捕捉機リストを更新し、または、当該航空機のモードSアドレスを追加してロールコール指定機リストを更新する。
(もっと読む)
電波発射源検出センサ、自動料金収受システム及び路側器
【課題】所定のレーンに設置された路側器と、その隣接レーンに存在する車載器との間で確立された誤通信を中断し、車載器に対する誤課金を防止することが可能な電波発射源検出センサと、このセンサを用いた自動料金収受システム及び路側器とを提供する。
【解決手段】所定のレーンに設置され、移動体に所持された応答器からの応答信号を第1の受信ビームにより受信し、応答器と通信を行う路側器に接続される電波発射源検出センサは、アンテナ部、検波部、方向特定部及び誤通信判定部を具備する。アンテナ部は、第2の受信ビームにより応答信号を受信する。検波部は、応答信号から、所定の検波周波数により必要信号を検波する。方向特定部は、検波結果に基づいて、電波強度を測定し、応答信号の到来方向を特定する。誤通信判定部は、電波強度及び到来方向等に基づいて、路側器と応答器との通信は誤りであるか否かを判定し、誤りであれば、誤通信通知を路側器へ出力する。
(もっと読む)
マルチラテレーションシステム
【課題】信号の送信タイミングを二次監視レーダの動作に対応させて、二次監視レーダにおける航空機の監視を妨げない。
【解決手段】マルチラテレーションシステムは、アンテナ角度入力手段と、変換手段と、決定手段と、送信手段とを備えている。アンテナ角度入力手段は、レーダ装置から当該レーダ装置の現在のアンテナの角度を入力する。変換手段は、前記複数の受信装置における信号の受信時刻の差から測位された航空機の位置を入力すると、当該航空機の位置を前記レーダ装置のアンテナの角度で表わす値に変換する。決定手段は、前記変換手段で変換された航空機の位置を特定するアンテナ角度を利用して、前記送信装置が質問信号の送信を停止する角度を決定する。送信手段は、前記アンテナ角度入力手段が入力するアンテナの角度が、前記決定手段が決定した角度以外で質問信号を送信する。
(もっと読む)
制御装置、レーダ検知システム、レーダ検知方法
【課題】レーダから出力された検知結果によって異常を監視し、レーダの性能の低下を検知する。
【解決手段】取得部1aは、レーダ2から出力された信号に基づき、車道を走行した複数台の走行車両のそれぞれについて、検知開始位置および検知終了位置の座標を取得する。算出部1bは、検知開始位置の座標の平均値および検知終了位置の座標の平均値を算出し、算出結果を有する検知状況情報を検知状況情報記憶部1eに記憶させる。比較部1cは、検知状況情報が示す検知開始位置の座標の平均値および検知終了位置の座標の平均値とそれぞれの所定の基準値とを比較する。異常判定部1dは、比較部1cによる比較結果に基づいて、レーダ2の異常の発生の有無を判定し、異常が発生したと判定した場合には異常の発生を示す情報を出力する。
(もっと読む)
送信装置
【課題】TIS−Bで信号を送信する際に、二次監視レーダやADS−B対応トランスポンダでの信号の送受信への影響を回避する。
【解決手段】ADS−B装置を搭載している航空機に対し、航空機に代わって航空機に関する拡張スキッタを送信する送信装置であって、拡張スキッタ処理手段と、予測手段と、スケジュール手段と、送信手段とを備える。拡張スキッタ処理手段は、航空機から送信された拡張スキッタを受信すると、当該拡張スキッタに受信時刻を関連づける。予測手段は、拡張スキッタ処理手段で関連づけられた受信時刻から、自装置が新たに拡張スキッタを受信する時刻を予測する。スケジュール手段は、予測手段で予測された時刻を利用して、航空機からの拡張スキッタの受信が多い時刻に、自装置からの拡張スキッタの送信を制限するスケジュールを決定する。送信手段は、スケジュール手段で設定されたスケジュールに応じて拡張スキッタを送信する。
(もっと読む)
41 - 60 / 685
[ Back to top ]