
Fターム[5J070AF01]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 固定設置 (685)
Fターム[5J070AF01]に分類される特許
1 - 20 / 685
動体検知装置
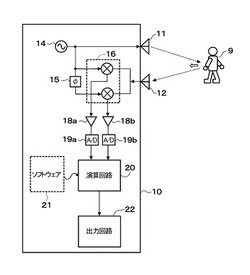
【課題】簡単で小型な構成となり、また回路の精度も重要でなく、占有帯域幅も広くなることなく、動体の存在、位置等を安定して計測できるようにする。
【解決手段】直交ドップラーミキサ16では、対象物9からの受信信号を入力して90度位相の異なるドップラー周波数信号を出力し、計測用ソフトウェア21を用いる演算回路20では、2つのドップラー周波数信号につき、一定時間毎に区切りながら連続して周波数分析を行い、一定時間内のパワースペクトルが最大となる周波数を求め、このパワースペクトル最大の周波数に基づいて計算された速度から一定時間の対象物の移動距離を求めると共に、パワースペクトル最大の周波数の2つのドップラー周波数信号の位相差から対象物の移動方向を求め、この移動方向に対応した正負符号を与えた移動距離を積算することにより対象物の相対位置変化を計測する。
(もっと読む)
無線機の方位検出装置

【課題】無線機の方位を電波の到来方向により検出する方位検出装置において、その近傍に反射物体が存在すると、反射波の影響により方位の検出精度が低下する。
【解決手段】記憶部28は電波の反射物体が存在する方位を示す反射角度範囲を記憶する。タグ解析手段42は電波の受信強度のピークに基づいて当該電波の到来方向を判定し無線タグ6の方位を検出する。タグ解析手段42は、受信強度の第1ピークに基づく到来方向が反射角度範囲内である場合には、受信強度の第2ピークに基づく到来方向の検出を試行し、その試行結果に応じて無線タグ6の方位を決定する。
(もっと読む)
踏切障害物検知装置
【課題】検知領域に隣接する非検知領域に送信されたサイドローブの反射波による誤検知を抑制し、踏切道内における障害物の有無を安定して検知することのできる踏切障害物検知装置を提供する。
【解決手段】踏切障害物検知装置1は、踏切道10に設定された検知領域S(S1a〜S1c,S2a〜S2c)及びこれに隣接する非検知領域(S1x,S2x)に電波を送信するとともに、送信した電波の反射波を受信する送受信機2,3を含む。そして、踏切障害物検知装置1は、検知領域である領域S1a、S2aに送信された電波の反射波である第1の反射波と、非検知領域S1x,S2xに送信された電波の反射波である第2の反射波との両方に基づいて、検知領域Sである領域S1a,S2aにおける障害物の有無を判定する。
(もっと読む)
位置検出装置
【課題】移動体の位置を精度良く検出する位置検出装置を提供する。
【解決手段】位置検出エリア2に敷設された漏洩同軸ケーブル1a,1bと、漏洩同軸ケーブル1a、1bに接続され、電波を送受信し、この送信する電波には固定局識別信号を含み、電波の送信出力値を変更できる少なくとも2つのアクセスポイント3a、3bと、位置検出エリア2内を移動し、アクセスポイント3a、3bからの送信電波を受信し、受信した固定局識別信号と移動局識別信号を含む電波を送信する少なくとも1つの携帯端末4と、アクセスポイント3a、3bに接続され、電波送信出力値を設定し、固定局識別信号と移動局識別信号と電波送信出力値とから携帯端末4の位置を特定する制御処理部5を有する位置検出装置。
(もっと読む)
ドップラーレーダシステム、及び物体検知方法
【課題】受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上する。
【解決手段】本発明に係るドップラーレーダシステム100は、送信アンテナ120と、複数の受信アンテナ121と、目標物体150に含まれる複数の反射点の各々の位置を示す複数の測定点を算出するマイクロドップラー演算部105と、第1間隔を有する第1分割枠を用いて、測定点の第1重心116aを算出する第1重心算出部106aと、第1間隔より狭い第2間隔を有する第2分割枠を用いて、測定点の第2重心116bを算出する第2重心算出部106bと、複数の第2重心116bの中から、第2重心116bと第1重心116aとの位置関係に基づいて、少なくとも1つの第2重心116bを目標物体150の位置に決定する重心決定部107とを備える。
(もっと読む)
受信装置
【課題】受信信号の解析の信頼性を向上する。
【解決手段】受信装置は、演算手段と、選択手段と、二値化処理手段とを備える。演算手段は、受信信号のピーク値を用いて当該受信信号の第1閾値を求める。選択手段は、演算手段で決定された第1閾値を出力するとともに、受信信号から所定のパルスパターンを検出後所定の期間、第1閾値に代えてパルスパターンのピーク値を用いて求められた第2閾値を選択して出力する。二値化処理手段は、選択手段から出力される閾値を利用して、受信信号を二値化する。
(もっと読む)
位置特定システム
【課題】航空機から送信された信号の反射信号を利用して航空機の飛行を監視する。
【解決手段】位置特定システムは、複数の距離測定装置と位置特定装置とを備える。各距離測定装置の送信手段は、信号を送信する。各距離測定装置の相関処理手段は、送信手段が送信した信号が航空機に反射した反射信号を受信し、送信手段からの信号の送信時刻と当該信号が反射した反射信号の受信時刻との相関を求める。位置特定装置の入力手段は、複数の距離測定装置から相関結果を入力する。位置特定装置の特定手段は、入力手段が入力した相関結果から求められる各距離測定装置と航空機との距離を利用して当該航空機の位置を特定する。
(もっと読む)
船舶の統合監視のための衛星情報及び船舶情報の統合方法
【課題】本発明は、船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
【解決手段】より具体的には、合成開口レーダ(Synthetic Aperture Radar、SAR)から送信される船舶についての情報である衛星情報と、各船舶に搭載された船舶自動識別装置(Automatic Identification System、AIS)から送信される船舶情報とを統合して、前記船舶自動識別装置を搭載し、識別が可能な確認船舶および前記船舶自動識別装置が搭載されていない未確認の船舶をすべて監視することが可能な船舶の統合監視のための衛星情報及び船舶情報の統合方法に関する。
(もっと読む)
定在波レーダー内蔵型LED照明器具
【課題】トイレ、風呂場、廊下等に設置してある既存の照明器具の代わりに設置するだけで、人体の位置、呼吸数及び心拍数等を検出することができ、人体の容体の急変を迅速に検知することができる定在波レーダー内蔵型LED照明器具を提供する。
【解決手段】ケース内に、円周上に配置されたLED6と、定在波レーダーモジュール8と、演算部31が設けられた基板7と、LED制御ユニット10とが配置されている。LEDから照明光が外部に向けて出射されると共に、定在波レーダーモジュール8からマイクロ波が送信され、反射波を検出する。演算部31は、送信波及び反射波を合成して、定在波を検出し、この定在波から、被反射体までの距離及び微小変位(脈拍、呼吸)を検出する。
(もっと読む)
トイレ装置
【課題】トイレ室に設けられる各種のトイレ装置であって、誤検知を極力抑制して無駄な電力の消費を抑制しつつ、使用者が使用する際には所定の予備的動作を確実に実行可能なトイレ装置を提供することを目的とする。
【解決手段】トイレ室内に設けられ、電波の送受信を行うドップラーセンサと、前記ドップラーセンサの出力信号に基づいて所定の制御を実行する制御部と、を備えたトイレ装置であって、前記制御部は、前記ドップラーセンサから出力されるドップラー信号の直流成分を検出する第1の検出手段と、前記ドップラーセンサ信号に含まれる周波数成分を検出する第2の検出手段と、を有し、トイレ室のドアの開動作に伴う前記ドップラーセンサ信号の直流成分と周波数成分の推移の少なくともいずれかに基づいてドアの設置環境を判定し、判定したドア設置環境に応じて検出閾値を設定して、前記ドアの開動作を検出するドア開検出モードを実行することを特徴とするトイレ装置を提供する。
(もっと読む)
無線タグ方向探知システム
【課題】ノイズ検出用のアンテナを追加することなく、ノイズの少ない通信チャネルを探すことができる無線タグ方向探知システムを提供する。
【解決手段】無線タグ200は、送信するデータを、トリガデータと、方向探知用データに分ける。無線タグリーダ100は、通信用アンテナ140で受信待ちを行い、トリガデータを受信したらチャネル指定データを送信する。このチャネル指定データを受信した場合に、無線タグ200は方向探知用データを送信する。また、無線タグリーダ100は通信用アンテナ140で受信待ちをしている間、方向探知用アンテナ150を用いて、方向探知チャネルの候補チャネルでノイズ強度を測定して方向探知チャネルを決定する方向探知チャネル決定処理を行なう。そして、チャネル指定データで、この方向探知チャネル決定処理で決定した方向探知チャネルを指定し、方向探知用データの送受信は、指定した方向探知チャネルで行う。
(もっと読む)
航空機情報表示装置及びプログラム
【課題】フライトプランのない不審な航空機の監視を容易とする。
【解決手段】実施形態の航空機情報表示装置は、管制空域内に存在する航空機を検知したセンサデータを受け付けて、航空機にかかる航空機情報を取得する航空機情報取得手段と、管制空域内を飛行する航空機のフライトプランを記憶するフライトプラン記憶手段と、取得された航空機情報をもとに、管制空域内に存在する航空機の各々が記憶されたフライトプランの航空機に該当するか否かを判定する判定手段と、判定手段の判定結果をもとに、記憶されたフライトプランに該当する航空機の航空機情報と、記憶されたフライトプランに該当しない航空機の航空機情報とを異なる表示態様で表示する表示手段とを備える。
(もっと読む)
電車線路用監視システム
【課題】 大がかりな装置を設けることなく、監視対象設備の変位を推定することにより電車線路設備の総合的な監視を簡単で正確に、低コストで行う。
【解決手段】 電車線路用監視システム1は、監視対象に取り付けられる無線タグ2と、この無線タグ2が発した信号を受けて受信時刻を取得する測定ユニット3と、測定ユニット3からの受信時刻を演算処理して無線タグ2の取付位置を推定するロケーションサーバ4とで構成する。測定ユニット3は、無線タグ2の信号を受ける受信アンテナ5aを備えたタグリーダ5と、信号の受信時刻を内蔵の時計6aで記録する測定器6とを一組とする、各受信アンテナ5aが互いに異なる位置に配置された四組を備える。ロケーションサーバ4は、各測定器6からの時刻情報を受けて、各受信アンテナ5aでの受信時刻の時間差に信号の伝播速度を乗じて無線タグ2から各受信アンテナ5aまで距離の差を算出し、無線タグ2の位置を推定する。
(もっと読む)
自動水栓装置
【課題】泡沫吐水を行う場合であっても、吐水口からの水流の周囲に沿って検知範囲を下流側に確実に延ばすことができる電波センサを用いた自動水栓装置を提供する。
【解決手段】電波放射口27から放射される電波の指向性を決定するための指向性決定手段を備え、指向性決定手段は、止水中よりも吐水中の方が、電波センサの検知範囲のうち、電波強度の高い領域が水流の周囲に沿って下流側に延びるように、電波と水流とを干渉させるように構成されており、水管20は、吐水口26から空気の泡を含む洗浄水を吐水するように構成されており、電波放射口27から放射された電波が、空気の泡を含む洗浄水の水流によって減衰されることを抑制するための減衰抑制手段を更に備えた。
(もっと読む)
レーダ装置
【課題】本発明は、レーダ装置に係り、対象物として実際に高さを有する立体物と見かけ上高さを有する非立体物とを区別することにある。
【解決手段】電波を送信する送信手段と、送信手段から送信される電波の反射波を受信する受信手段と、を備え、受信手段に受信される反射波に基づいて対象物を検知するレーダ装置は、受信手段に受信される反射波に基づいて、対象物の基準位置に対する相対高さを検出する高さ検出手段と、高さ検出手段により検出される相対高さの、距離又は時間に対する変動に基づいて、該対象物が絶対的な高さを有する立体物であるかを判定する立体物判定手段と、を備える。
(もっと読む)
車列長測定装置、車列長測定方法及び車列長測定用コンピュータプログラム
【課題】特殊な車両及び車両を後方から撮影するカメラを用いずに、車両の列の長さを測定できる車列長測定装置を提供する。
【解決手段】車列長測定装置は、所定の検知範囲内の車両の前面に対向して設置されたセンサから取得したセンサ信号に基づいて車両を検知し、検知された車両の位置及び速度を求める車両検知部21と、検知された車両のうち、センサに接近中でかつ最も近くを走行中の第1の車両の位置及び速度の変化から、第1の車両の停止位置を推定する停止位置推定部24と、推定された停止位置よりも車間距離だけセンサに近い位置を停車中の車両の列の最後尾と推定することで、停車中の車両の列の長さを求める車列長推定部25とを有する。
(もっと読む)
パッシブレーダ装置
【課題】送信レーダの送信諸元が未知であっても、目標のレンジおよびドップラ周波数の情報を取得することのできるパッシブレーダ装置を得る。
【解決手段】送信レーダ1からの直接波は、直接波受信系である直接波アンテナ3〜A/D変換部5を介して信号処理部101に入力される。目標からの目標反射波は、目標反射波受信系である目標反射波アンテナ3A〜A/D変換部5Aを介して信号処理部101に入力される。信号処理部101では、直接波受信系により観測した直接波観測データから送信レーダの送信信号の未知諸元を推定し、この推定結果と、直接波観測データと目標反射波受信系により観測した目標反射波観測データとに基づいて、目標のレンジおよびドップラ周波数の情報を推定する。
(もっと読む)
侵入検知装置、侵入検知システム、侵入検知方法および侵入検知プログラム
【課題】電波を用いて所定エリアにおける人間の侵入を検知する構成において、検知可能エリアが狭くなることを防ぐ。
【解決手段】侵入検知装置102は、他の装置から無線信号が送信される所定エリアにおいて、人間の動作を検知する。侵入検知装置102は、アンテナを含み、アンテナにおいて無線信号を受信するための受信部52と、受信部52によって受信された無線信号に基づいて所定エリアにおける空間特徴量を算出するための空間特徴量算出部11と、空間特徴量算出部11によって算出された空間特徴量に基づいて所定エリアにおける人間の動作を検知するための検知部82とを備える。受信部52は、アンテナの指向性パターンを選択可能であり、複数の指向性パターンの中から、受信する無線信号のレベルが最も小さくなる指向性パターンを選択する。
(もっと読む)
津波監視システム
【課題】 観測装置設置の経済性とメンテナンス性において卓越し観測確認が容易な津波監視システム。
【解決手段】 陸上に設置したレーダーから発するレーダー波により監視海面を一定周期でスキャンニングし、レーダー波の反射により監視海面の測定を行い、データを処理して海面の隆起を測定し、この観測測定において海面の上昇が一定値を超えたときにおいて警報を発することを特徴とする津波監視システム、地震発生時に、陸上に複数箇所に設置したP波地震計の観測データをサーバーに集め、発生した地震のP波の分析により、海側の震源とその地震の規模を算出し、津波の発生の可能性とその大きさを予測し、津波の可能性とその大きさが一定値を超えたときにおいて、前記記載の津波監視システムのデータとを総合的に判定して最終避難警報を発すること特徴とする津波監視システム。
(もっと読む)
レーダ装置及び目標位置算出方法
【課題】レーダ装置により算出される目標位置観測値のバタつきを抑制し、目標追尾処理を安定化させること。
【解決手段】本発明に係るレーダ装置(1)は、データ生成部(30)と、目標検出部(42)と、目標距離算出部(43)とを備える。データ生成部(30)は、追尾目標から受信した反射波に関するデータ(DA)を、レンジビン毎に生成する。目標検出部(42)は、距離ゲート(RG)内においてデータ(DA)が閾値レベル(TH)以上であるレンジビンの集合、あるいは、レンジビンの集合に振幅レベルが閾値レベル(TH)未満であるレンジビンがあるものの当該レンジビンの数や幅(隣接レンジビンの振幅レベルが閾値レベル(TH)未満であるレンジビンの数)が規定を満足しており集合と認められるものを、追尾目標に対応する目標レンジビン集合(TBG)として抽出する。目標距離算出部(43)は、目標レンジビン集合(TBG)に属する全レンジビンが示すそれぞれの距離の平均値を、追尾目標への距離である目標距離(R)として算出する。
(もっと読む)
1 - 20 / 685
[ Back to top ]