
Fターム[5J070AF02]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312)
Fターム[5J070AF02]の下位に属するFターム
Fターム[5J070AF02]に分類される特許
161 - 180 / 190
レーダ型探査装置
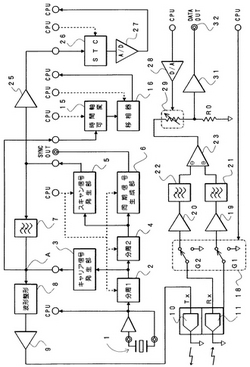
【課題】 広範囲のターゲットに対して利用することができる汎用性を持たせたレーダ型探査装置に対して好適に採用し得るSTC回路を提供すること。
【解決手段】 キャリア信号発生部3からのキャリア信号は、スキャン信号発生部5からのランプ信号を受けて位相変調される。位相変調されたキャリア信号は波形整形回路8において、その立下がりもしくは立上がりが、より急峻となるように波形整形され、これにより発生する高次高調波が送信アンテナ10より送信される。受信アンテナ11により受信された受信信号は、STC回路26と電圧制御抵抗素子29により利得制御される。この場合、STC回路26はキャリア信号に対して位相変調を行うための前記ランプ信号の波高値を利用するように構成されており、比較的単純な回路構成によって精度の高い利得制御動作が実現される。
(もっと読む)
行動検出システム

【課題】 低コストでかつ日頃の徘徊の程度のような行動パターンを容易に検出可能な行動検出システムを提供する。
【解決手段】 行動検出システムは、人が保持し、トリガー信号に応答してID番号を出力するIDタグと、それぞれが異なる機能を提供する複数の位置にそれぞれ設けられ、トリガー信号を発信するトリガー信号発信部と、IDタグの出力したID番号を受信するトリガー信号受信部と、複数のトリガー信号受信部に接続され、トリガー信号受信部の受信したID番号をその受信時刻とともに保持するデータ保持手段と、データ保持手段の保持するデータの中から、特定の人のデータを抽出する抽出手段と、抽出手段の抽出したデータに基づいて、所望の表示を行なう表示手段とを含む。
(もっと読む)
携行品探索方法および携行品探索システム
【課題】 簡易に携行品を探索することができる携行品探索方法および携行品探索システムを提供する。
【解決手段】 探索対象物である携行品(キーホルダー30、眼鏡40)に対し、アンテナ12およびICチップ13を具備するRFIDタグ10を貼り付けておき、探知機20によりRFIDタグ10と交信してキーホルダー30や眼鏡40を探索する。
(もっと読む)
探査装置
【課題】 送信アンテナ体から受信アンテナ体に直接的に伝搬される直接波によるノイズ成分を少なくすることができる探査装置を提供すること。
【解決手段】 電磁波を送信するための送信用アンテナ体54と、隠蔽物により反射された電磁波を受信するための受信用アンテナ体56と、受信用アンテナ体56より受信した電磁波を所要の通りに処理して隠蔽物の探査信号を生成する信号処理手段と、を具備する探査装置。送信用アンテナ体54と受信用アンテナ体56との間に、送信用アンテナ体54から受信用アンテナ体56に伝搬される直接波を吸収する電磁波吸収体88が介在されている。電磁波吸収体88は、フェライト材料から形成される一対の第1電磁波吸収部材90,92と、合成樹脂材料から形成される第2電磁波吸収部材94とから構成される。
(もっと読む)
近距離場位置測定システムおよび方法
ヌル軸が垂直であり、かつ、水平面などの対象となる平面内にヌル軸が位置するように配置された、2つの磁気アンテナを利用することによって位置を特定するために、近距離場信号特性が使用される。2つのアンテナは、送信アンテナまたは受信アンテナとして使用されてもよい。アンテナを直交方式で駆動することによって、対象となる平面内で全方向性パターンの均等物を生成するように、アンテナは駆動されてもよい。直交駆動は、時間直交または位相直交であってもよい。位置は、伝搬特性を含んでもよい近距離場応答に基づいて特定され、伝搬特性は、振幅、位相、相対的な振幅、または位相、あるいはその他の特性を含んでもよい。一実施形態では、1つの受信機の位置を特定するために、複数の送信機が利用される。別の実施形態では、1つの送信機の位置を特定するために、複数の受信機が利用される。空間効率的な磁気アンテナが開示される。 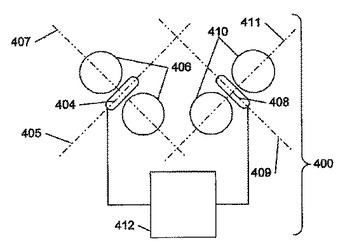 (もっと読む)
(もっと読む)
2つの無線通信装置間の距離を測定する方法およびその方法を実施するように適合された装置
本発明は、2つの無線通信装置(1、2)の間の距離を測定する方法に関し、無線信号の交換遅延を測定することにある。本発明によれば、各信号の伝搬時間は交換遅延から計算され、続いて、2つの装置の間で伝送される単一のチャネル測定フレームの分析を使用して補正される。補正された伝搬時間は、無線信号がたどる最短の伝搬経路に対応する。無線伝送媒体の構成の大部分では、補正された伝搬時間は、2つの装置(1、2)を隔てる距離の直線上の測定値である。 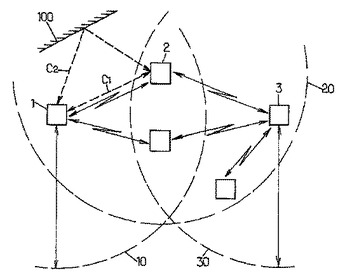 (もっと読む)
(もっと読む)
無線タグ通信システム
【課題】 通信対象である無線タグの正確な位置を簡便に検出し得る無線タグ通信システムを提供する。
【解決手段】 所定の基準位置に対して位置固定に設けられる第1の無線タグ14と、その基準位置に対して移動可能である第2の無線タグ16と、前記第1の無線タグ14及び第2の無線タグ16との間で情報の通信を行う無線タグ通信装置12とを、含み、その無線タグ通信装置12は、前記第1の無線タグ14及び第2の無線タグ16との間で情報の通信を行うことにより、前記基準位置に対するその第1の無線タグ14の位置を判定すると共に、その第1の無線タグ14の位置に基づいて前記基準位置に対する前記第2の無線タグ16の位置を判定するものであることから、前記基準位置に対して無線タグ通信装置12が移動したとしても、前記第1の無線タグ14との相対位置関係から前記第2の無線タグ16の位置を好適に検出できる。
(もっと読む)
合成開口を用いた無線ベースの位置決定システム
本発明は、移動局および少なくとも1つの位置固定局を有する無線ベースの位置決定システムの測定精度を高める方法に関する。本発明の特徴は、
− スタート位置から出発した上記の移動局の運動を絶対センサシステムおよび相対センサシステムの測定データによって検出し、
− この測定データを用いて開口合成の形態で仮想アンテナを形成し、
− この開口合成を使用することによって、前記の移動局を位置固定局に、および/またはこの逆に互いに焦点合わせすることである。  (もっと読む)
(もっと読む)
位置測定システムおよび位置測定方法
【課題】 人の足の位置を正確に測定することができるシステムであって、さらに体の向きを推測することにより、装置の消費電力を低く抑えることができる位置測定システムおよび位置測定方法を提供する。
【解決手段】 舞台面上1で、人111が右足にID発信靴右21を、左足にID発信靴左22を装着する。舞台面下2には電波送受信装置31および制御表示装置51が設置され、電波送受信装置31が舞台面上1に向けて電波を発信する。ID発信靴右21およびID発信靴左22が電波を受信し、それぞれのID情報を電波送受信装置31に送信する。電波送受信装置31はID情報と電波送受信装置の位置情報を制御表示装置51に送信する。制御表示装置5は舞台面が表示された画面上に人111の位置と向きを表示する。これを時系列的に繰り返すことにより、舞台上の人の位置と動きを画面上で確認することができる。
(もっと読む)
後方散乱に基くトランスポンダの位置を測定する方法
本発明は、後方散乱に基くトランスポンダの位置を測定する方法に関する。本発明に寄れば、この方法は、基地局(BS1)により不変調搬送波信号(TS)を送信し、トランスポンダ(TR1)が基地局(BS)の応答範囲へ入る時、基地局(BS1)から送信される搬送波信号(TS)の位相変調及び後方散乱により発生される位置測定信号(OS)を、トランスポンダ(TR1)により送信し、位置測定信号(OS)に基いてトランスポンダ(TR1)の位置を測定する段階を含んでいる。例えば物品経済組織における使用。 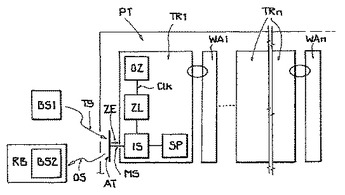 (もっと読む)
(もっと読む)
レーダ装置
【課題】 走査時間の長時間化を招くことなく、観測領域を広げることができるとともに、グレーティングローブの発生を招くことなく、受信アンテナの素子数を削減することができるようにする。
【解決手段】 不等間隔に配置されている複数の素子アンテナから構成されている受信アンテナ3を用いて、目標に反射されたパルス信号を繰り返し受信する受信器の他、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する対称方向抑圧用フィルタ生成部9を設け、その受信器により繰り返し受信されたパルス信号と対称方向抑圧用フィルタ生成部9により計算された荷重とを用いて受信ビームを形成する。
(もっと読む)
デバイス間距離測定
異なるクロックレートを有しうるクロックを有する第1及び第2デバイス。デバイス間を伝播する信号の伝播距離の指標を得ることは、第1デバイスから第2デバイスにダイ1信号12を送信することを伴う。ターンアラウンドタイムTAT後、第2信号14は、第2デバイスから第1デバイスに送信される。クロック内のあらゆるエラーは、ターンアラウンドタイムTATの測定値のエラーをもたらしうる。デバイスは、LO周波数整合が存在するまで周波数分割比を調整することにより、若しくは、混合された信号の包絡線のオフセット周波数を求めることにより、第1及び第2デバイスのクロックレートの比を算出する回路を含む。クロックレートの比は、ターンアラウンドタイムTATを補償してエラーを緩和するために用いられる。正確な距離の測定値は、リレーアタックが車両セキュリティシステムで発生したか否かを判断するために用いることができる。 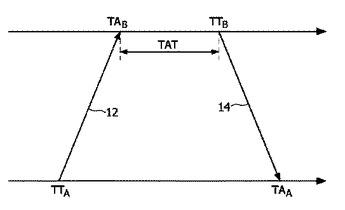 (もっと読む)
(もっと読む)
内部欠陥及び配筋位置表記装置
【課題】
本発明の目的は、電磁波レーダを使用して空洞等の内部欠陥と配筋位置とを識別し、コンクリート表面に自動的にマーキングし、コンクリート構造物の解体、補修作業を効率的に行える内部欠陥及び配筋位置表記装置を提供することにある。
【解決手段】
本発明は、電磁波をコンクリート構造物の内部に向けて照射し、前記コンクリート構造物の内部に存在する被検出物より反射された反射電磁波による出力信号に基づいて被検出物中の空洞及び配筋の少なくとも一方を識別すると共に、電磁波の移動速度と識別結果とに基づいて空洞と配筋との少なくとも一方を区別してコンクリート構造物表面にマーキングを施すことを特徴とする。
(もっと読む)
ICタグリーダ位置特定装置およびICタグリーダ位置特定方法
【目的】本発明は、複数のICタグをもとに位置を特定するICタグリーダ位置特定装置およびICタグリーダ位置特定方法に関し、空間内に複数の位置情報等を書き込んだICタグを配置することで、移動するリーダの位置およびICタグから読み取った情報(商品情報、場所情報などの情報)を簡易かつ高精度に表示等することを目的とする。
【構成】 位置情報を書き込んで空間内の該当位置に配置する複数のICタグと、ICタグから情報を読み取るリーダと、リーダによって信号強度を可変して送信しICタグから情報を読み出させたときあるいは読み取れなくなったときの信号強度からICタグまでの距離を算出する手段と、算出した複数のICタグまでの距離および複数のICタグからそれぞれ読み取った位置情報をもとにリーダの位置を算出する手段とを備える。
(もっと読む)
地中レーダ画像処理法
【課題】
地中レーダ等の近距離レーダの画像を処理する方法において、現在使われている処理法は、多大な計算時間を要する、また、特に複数の対象物が近接して存在する場合に虚像を生じるという欠点がある。本発明はこれら2つの課題を解決することを目的とする。
【解決手段】
対象物モデルから参照パターンを求め、参照パターンの自己相関、参照パターンと受信データとの相互相関を求める。相互相関から対象物探査用データと対象物評価用データを作成し、対象物探査用データの極値を自己相関と対象物評価用データに基づいて評価する。評価の結果、その極値値が対象物の可能性があると判定されると、対象物探査用データのその極値の位置から自己相関を減算し、新たな探査を実行する。
(もっと読む)
車両用始動支援システム
前方を走行する車両(36)を位置測定するための長距離位置測定システム(10)と、始動プロセスを起動および制御するための始動制御器(24、26)と、を備える車両用始動支援システムにおいて、長距離位置測定システムが自己の車両(34)のすぐ前方の対象(46)を位置測定するための短距離位置測定システム(12)と組合されており、近距離位置測定システム(12)の信号に応じて始動プロセスを阻止するように決定装置(22)が形成されている。 (もっと読む)
無線タグ検出システム
【課題】 送信電波の相互干渉を好適に防止しつつ所定の領域内における無線タグを好適に検出する無線タグ検出システムを提供する。
【解決手段】 複数の据置式無線タグ通信装置12と携帯式無線タグ通信装置14とが互いに異なるタイミングで送信信号を送信するように制御する送信制御部146を含むことから、時分割で前記送信信号を送信することで、前記複数の据置式無線タグ通信装置12から送信される送信電波と携帯式無線タグ通信装置14から送信される送信電波との干渉が好適に防止される。すなわち、送信電波の相互干渉を好適に防止しつつ所定の領域内における無線タグ16を好適に検出する無線タグ検出システム10を提供することができる。
(もっと読む)
防空シミュレーションシステム
【課題】防空要素の配置にかかるユーザの手間を軽減できるようにし、これにより便宜の向上を図った防空シミュレーションシステムを提供すること。
【解決手段】ユーザが設定した防空エリアをメッシュ状に複数の小領域に分割し、各小領域にレーダ11cを配置したと仮定した場合のレーダ覆域面積を、デジタルマップの3次元データに基づいて算出する。その結果を、メッシュの表示色を階調的に変化させることによりGUI表示する。そして、ユーザにより選択指定されたメッシュのそれぞれにつき、シミュレーションにより防空指標を算出してその結果をユーザに提示する。
(もっと読む)
RFタグを利用した位置情報システム
【課題】RFタグを利用して、特定の領域内で移動端末による通信が不能な相手方の位置情報を測位し、当該位置情報を移動端末に提供可能とする。
【解決手段】このRFタグを利用した位置情報システムは、自己の識別番号を記憶したRFタグ1と、このRFタグ1の識別番号と自己の識別番号を合わせて送信するRFタグリーダライタ2と、このRFタグリーダライタ2よりRFタグ1及びRFタグリーダライタ2の識別情報の受信時にデータベース34の記憶内容を更新するサーバ3とを有し、このサーバ3が移動端末6からの要求に応じて上記データベース34,35より当該移動端末6の識別番号に対応するRFタグ1の識別情報を特定し、当該RFタグ1に最至近のRFタグリーダライタ2の位置情報をRFタグ1の位置情報として送出するものである。
(もっと読む)
自己位置推定装置、自己位置推定方法、その自己位置推定方法をコンピュータに実行させることが可能なプログラム、及び、そのプログラムを記録した記録媒体
【課題】 受信器により受信した信号を用いた自己位置推定の場合に当てはまる機械学習ベースの自己位置推定装置等を提供する。
【解決手段】 推定部23を設け、移動体5に設けられたリーダ9により受信されたタグ31〜3Mの信号に基づいて互いに識別すべき場所ごとに設けられたサポートベクターマシンSVM151〜15Nの訓練を行い、訓練後のサポートベクターマシンを用いて移動体5の自己位置推定を行う。
(もっと読む)
161 - 180 / 190
[ Back to top ]