
Fターム[5J070AF03]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473)
Fターム[5J070AF03]の下位に属するFターム
無人車 (16)
Fターム[5J070AF03]に分類される特許
121 - 140 / 1,457
車載用レーダ装置の軸調整方法
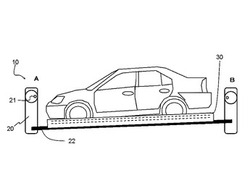
【課題】車両の地面対して水平な位置を簡易な方法で調節でき、車両に取付けるレーダ装置の軸調整を正確に行うことの出来る技術を提供する。
【解決手段】車両を上下方向に調節可能な車両昇降台22上に、車両の水平位置を確認できる水準器30を設けることにより、車両の水平位置を該水準器を見ながら調節する。車両水平位置が調節された基準位置において、レーダ装置の車両への取り付けを行う。レーダ装置の車両への取り付け後におけるレーダ装置の軸調整は、公知の方法を用いることが出来る。
(もっと読む)
レーダ用アンテナ、及びレーダ装置

【課題】放射素子から放射されるレーダ波に影響を与えないように伝送線路の放射損を抑制するレーダ用アンテナ、及びレーダ装置を提供することを課題とする。
【解決手段】レーダ用アンテナ1であって、誘電体5を挟んで導電板4上に載置された複数の放射素子2が、該導電板4上で伝送線路7に繋がるアンテナ本体3と、伝送線路7を覆う導電性の膜9がアンテナ本体3側に成膜された、該アンテナ本体3を覆うレドーム6と、を備える。
(もっと読む)
移動体衝突防止装置及び該装置を搭載した移動体
【課題】移動体の衝突を防止する移動体衝突防止装置に関する。
【解決手段】移動体に配置され、他の移動体との間で信号を送受信する移動体衝突防止装置10であって、測定波を送信する送信部120と、前記送信部に接続され、該送信部を駆動する駆動信号を生成し該送信部を駆動する送信駆動部110と、前記他の移動体から送信された測定波を受信する受信部130と、前記受信部が受信した測定波の強度により、前記移動体と前記他の移動体の間の相対位置を計算する計算部140と、前記計算部によって計算された結果に基づいて前記移動体が前記他の移動体と衝突するか否かを判断する衝突判断部150とを備える。
(もっと読む)
レーダ装置
【課題】車幅方向中心から離れた位置に設置するレーダ装置において、レーダ装置の設置位置が基準設置位置からズレたか否かを検出すること。
【解決手段】レーダ装置は、自車両の前部において、自車両の車幅方向中心から離れ、かつ、規定角度範囲の中心軸が自車両の車幅方向の中心軸と自車両の前方にて交差するように、検知基準軸と設置基準軸との関係が規定された基準設置位置に固定して使用される。そのレーダ装置では、物体検知処理を実行する(S110)ことで生成した検知データの中から、抽出条件に合致する対象検知データを特定する(S120〜S200)。そして、複数の対象検知データによって表される水平確定位置を水平基準データに照合した結果が、判定基準値Thd未満であれば(S230:NO)、検知基準軸にズレが生じているものと判定して、ズレ対応処理を実行する(S240)。
(もっと読む)
自動車用レーダシステムおよびその使用方法
【課題】標的ゾーン46内の物体34,36の存在を示すための検出信号を生じる。
【解決手段】車両用レーダシステム44は送信部56および受信部58を備え、送信部56が、標的ゾーン46に無線信号を出力するための単一ビームアンテナ72を含む。受信部58は直接受信信号78および間接受信信号80を受信するための単一ビームアンテナ76を含む。受信信号78、80は、標的ゾーン46内の物体34、36から無線信号の反射である。間接受信信号80は物体34、36から車両42の反射パネル54に反射され、受信アンテナ76で受信するために間接受信信号80は反射パネルに反射される。標的ゾーン46内の物体34、36の存在を指示する検出信号を生じるために受信信号78、80は合算される。
(もっと読む)
通信測距複合システム、通信測距装置、親機および子機
【課題】通信フレームの変調方式にかかわらず、効率的かつ精度よく情報の伝達と測距とを行うことが可能な通信測距複合システム等を提供する。
【解決手段】通信測距複合システムでは、親機3が制御フレームの送信後(第1の送信時間α後)に第1のパルス信号を子機4に送信し、子機4が制御フレームの受信後(第2の送信時間β後)に第2のパルス信号を親機3に送信する。そして、親機3が第1のパルス信号の送信タイミングから第2のパルス信号の受信タイミングまでの時間(待機時間Tm)を算出し、子機4が第1のパルス信号の受信タイミングから第2のパルス信号の送信タイミングまでの時間(応答時間Ts)を算出する。よって、制御フレームの送信及び受信タイミングを精確に検出する必要がなく、第1の送信時間αや第2の送信時間βにズレが生じても、パルス信号のエッジさえ検出できれば、待機時間Tmおよび応答時間Tsの算出に影響を与えずに済む。
(もっと読む)
レーダ装置
【課題】反射波の受信信号から反射元の種類を判別可能な技術を提供すること。
【解決手段】レーダ装置の信号処理部は、反射波のパワー(受信電力)Pと、このパワーPに対応する反射波の受信時点から観測周期Tsw=Tm遡った時点で受信された反射波のパワーPbと、に基づき、パワーPbに対するパワーPの変化量Y=log(P)−log(Pb)を算出する(S310)。一方、当該レーダ装置は、判別対象とする反射元の種類毎に、レーダ波が当該種類の反射元で反射して到来する反射波から算出される変化量Yの確率分布を記憶する。そして、算出された変化量Yと、上記反射元種類毎の確率分布とから、今回算出された変化量Yに対応するレーダ波の反射元の種類を判別する。即ち、反射元種類毎に、当該変化量Yが得られる確率Prを算出し(S320)、確率Prの最も高い種類を、今回のレーダ波の反射元であると判別する(S330)。
(もっと読む)
FM−CWレーダ装置、ペアリング方法
【課題】目標物に対するペアリングを短期間で精度良く行うことを可能とするFM−CWレーダ装置、ペアリング方法を提供すること。
【解決手段】電圧制御発振器11の制御電圧VCONTの算出方法を周波数上昇区間と周波数下降区間とで異なるように制御し、送信波と受信波を混合して得られたビート信号の周波数成分を算出し、周波数上昇区間におけるビート信号の周波数成分と、周波数下降区間におけるビート信号の周波数成分とのペアリングを行い、ペアとなった成分同士の信号レベルの差が所定値以下である周波数成分のペアを、目標物(ターゲット)に対応する正しいペアとして特定する。
(もっと読む)
レドームの製造方法
【課題】意匠部のサイズがレーダ透過範囲よりも小さい場合であっても、機能を損なわず、一体感のある外観を有しするレドームを製造することのできる製造方法を提供する。
【解決手段】レドーム10の製造方法は、背面に凹部11A,11B(5A)を備えた透明部材からなる第一成形部材11を成形する第一成形工程と、前面に凹部11A,11Bに嵌まれる凸部16A,16Bを備えた第二成形部材16を成形する第二成形工程と、第一成形部材11の背面と第二成形部材16の前面の少なくとも一方に接着剤を塗布する接着剤塗布工程と、第一成形部材11と第二成形部材16を真空状態で貼り合わせる貼合工程と、を有する。
(もっと読む)
レーダ装置
【課題】自レーダユニットの受信信号レベルに対する他レーダユニットからの干渉信号レベルを効果的に抑圧し、当該抑圧に必要な測定時間及び付加回路の増大を回避する。
【解決手段】第1レーダ送信部は、第1送信トリガ信号生成部が所定の同期確立信号の受信時から第1遅延時間経過後に生成された第1送信トリガ信号に基づいて、第1送信符号制御部の制御の下で、第1レーダ送信信号を第1送信周期で周期的に送信する。第2レーダ送信部は、第2送信トリガ信号生成部が当該同期確立信号の受信時から第2遅延時間経過後に生成された第2送信トリガ信号に基づいて、第2送信符号制御部の制御の下で、第2レーダ送信信号を第2送信周期で周期的に送信する。第1遅延時間及び第2遅延時間に応じて、第1レーダ送信部及び第2レーダ送信部からの各干渉信号の到来時が第2レーダ送信信号及び第1レーダ送信信号の各送信区間内となる。
(もっと読む)
障害物認識装置
【課題】車両の進行方向の速度変化と共に車両の進行方向と垂直な左右方向の速度変化も判断することで、障害物検出率の向上を図った障害物認識装置を提供する。
【解決手段】レーダを介して検出した物標について、物標の情報と車両の走行情報とに基づき、車両の進行方向に関する絶対速度及び車両の左右方向に関する絶対速度の両方を判断する。両方の絶対速度が所定の基準値以下であると判断された場合、すなわち物標が路面を移動していないと判断された場合に限り、レーダ検出によって得られる情報とカメラ等によって撮像される画像情報とをフュージョンした情報を用いて物標の立体物判断を行う。いずれかの絶対速度が所定の基準値を超える場合には、レーダ検出によって得られる情報のみによって物標の立体物判断を行う。
(もっと読む)
レーダ装置
【課題】従来の信号処理方法においては、アップ周波数とダウン周波数のペアを決定するペアリングが困難となる場合がある。
【解決手段】本発明のレーダ装置は、送信した電波が複数の目標物で反射された反射波を受信して受信信号を生成し、該受信信号から複数のアップ周波数ピークと複数のダウン周波数ピークとを検出すると共に、アップ周波数ピーク及びダウン周波数ピークにおける目標物に関する特性値を測定し、複数のアップ周波数ピークの各々と複数のダウン周波数ピークをそれぞれ1つずつ組み合わせ、各々の組み合わせについて、測定された特性値に基づいてマハラノビス距離を算出し、マハラノビス距離が所定のしきい値以下の組み合わせをペアリング候補として決定し、該決定したアップ周波数ピークとダウン周波数ピークに基づき、目標物の距離、相対速度及び角度の少なくとも1つを含む今回のデータを算出することを特徴とする。
(もっと読む)
FMCWレーダ装置
【課題】目標物体に関する情報を算出する際の演算周期を短くでき、よって、目標物体の検知の際の応答性を向上することができるFMCWレーダ装置を提供すること。
【解決手段】レーダ装置1では、第1コア35と第2コア37とを用い、上り変調時の受信データ(上りビート信号)が得られた場合には即座に第1コア35でFFT等の演算を行い、下り変調時の受信データ(下りビート信号)が得られた場合には、第1コア35での演算と並列に、即座に第2コア35でFFT等の演算を行う。つまり、演算に必要な信号が得られた場合には即座に各コア35、37で演算を行うことができるので、上りビート信号と下りビート信号が得られるのを待って演算を行う必要がない。そのため、各演算処理の負荷(FFT等の演算負荷)が高負荷であっても、レーダ装置1における目標物体の認識のための演算周期を短くでき、よって、車両等の目標物体の検知の応答性を向上できる。
(もっと読む)
レーダ装置
【課題】対象物の水平方向と鉛直方向の両方の角度を検出できるレーダ装置を得る。
【解決手段】全てのアンテナは、水平面と直角となる平面である鉛直面に配置され、かつ長方形である開口面の長手方向が鉛直方向に配置され、受信アンテナRx1、Rx2は、素子間隔Lhで水平方向に配置され、送信アンテナTx1、Tx2は、受信アンテナRx1、Rx2を挟むように、水平方向に配置され、受信アンテナRx3、Rx4は、素子間隔Lvで鉛直方向に配置され、かつ、送信アンテナTx2に隣接して水平方向に配置され、送信アンテナTx1、Tx2から時分割に高周波パルス信号を送信させ、受信アンテナRx1、Rx2によって受信された2つの受信信号の位相差から水平方向の方位角を検出するとともに、受信アンテナRx3、Rx4によって受信された2つの受信信号の位相差から鉛直方向の仰俯角を検出する信号処理器10を備える。
(もっと読む)
車両内の識別対象物を検出する方法
【課題】識別対象物が、自動車の周りの領域の内部に位置するかどうかについての判断を行なうことのできるシステム。
【解決手段】校正信号(S_CAL)をアンテナ装置の方向に送出して制御電力(PR)を決定し、制御電力(PR)に対応する関数信号(S_FONC)をアンテナ装置の方向に送出して、アンテナ装置が所定の磁界を放出するようにし、識別対象物が受信し、かつ放出磁界に対応する磁界(Br)を測定して、公称磁界(B0)と比較し、かつ前記比較の結果によって変わる形で、識別対象物が、アンテナ装置の周りの領域(ZO)の内部に位置するかどうかについての判断を行なう。
(もっと読む)
障害物認識装置
【課題】自車両周辺に存在する障害物のレーダ情報、および車載カメラによって撮像された画像情報を最適に用いながら、当該障害物の位置および大きさ等の詳細情報を正確に認識する障害物認識装置を提供する。
【解決手段】本発明の障害物認識装置は、レーダを介して障害物のレーダ情報を取得するレーダ情報取得手段と、レーダ情報に基づいて障害物を第1障害物と第2障害物とに分類する障害物分類手段と、障害物が第1障害物に分類された場合、レーダ情報と画像情報とに基づいて障害物を認識し、障害物が第2障害物に分類された場合、レーダ情報に基づいて障害物を認識する障害物認識手段とを備える。
(もっと読む)
車載用レーダ装置
【課題】マルチパスフェージングの発生に類する状況下で、ターゲットの信号強度が急激に小さくなり、測定段階の結果が不安定になっても、車両制御用などの最終的な出力は不安定化させないレーダ装置を得る。
【解決手段】測定部14による各測定ごとのターゲットの位置と相対速度に関わる情報を複数の周期に亘って入力し、時系列で相関があるターゲットを探索しながら、ターゲットの位置および相対速度と、ターゲットの分類と、今回測定周期までの時系列相関成立回数と、今回以前の測定におけるターゲット情報の変動状態と、時系列相関の不成立を許容する回数とを含むターゲットの情報セットを生成する時系列相関部16と、ターゲットの情報セットを記憶する記憶部と、ターゲットの情報セットのうち、予め設定された条件を満足するものだけを出力する結果出力部17とを備える。
(もっと読む)
波源推定装置及び波源推定方法
【課題】コヒーレント波である受信波を推定するとともに、演算負荷を低減できる波源推定装置を提供する。
【解決手段】波源推定装置は、アレーアンテナ24aにより電波又は音波を受信して受信波の波源の位置を推定する。波源推定装置は、波源の初期推定を行い、初期推定に基づく受信波のモード行列の位相を回転して変換行列を求め、受信波の相関行列を変換行列によって平均化し、波源演算に必要な相関行列を算出する。そして、波源推定装置は、演算過程で算出した変換行列と、先に算出された平均化処理後の相関行列とを基に代数的手法によって波源の位置を算出する。
(もっと読む)
障害物認識装置及び障害物認識方法
【課題】高い精度で障害物を認識することができる障害物認識装置を提供する。
【解決手段】本発明の一実施形態に係る障害物認識装置1は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段11と、第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段12と、第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段22と、合成推定反射出力と第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段24と、を備える。
(もっと読む)
車載用レーダ装置、および車載用レーダ装置用の電波干渉検知方法
【課題】ノイズレベルの変化や器差があっても、精度よく他のレーダ等からの電波干渉の発生を検知する。
【解決手段】上昇・下降を繰り返す周波数をもった変調波を送信する送信部(10)と、変調波が対象物で反射した反射波を受信する受信部(20)と、送信波と反射波の周波数差を持つビート信号を周波数解析し、周波数上昇時/下降時それぞれの周波数解析結果からピーク周波数を算出し、両ピーク周波数から対象物の距離と相対速度を算出する信号処理部(30)とを備え、信号処理部は、周波数上昇時/下降時のそれぞれのビート信号の周波数解析における上昇時ノイズレベルと下降時ノイズレベルとを比較し、一方のノイズレベルが他方のノイズレベルに対して所定値以上の差がある場合には、外乱電波による干渉が発生したと判定し、干渉検知信号として出力する干渉検知部(34)を有する。
(もっと読む)
121 - 140 / 1,457
[ Back to top ]