
Fターム[5J070AF03]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473)
Fターム[5J070AF03]の下位に属するFターム
無人車 (16)
Fターム[5J070AF03]に分類される特許
1,441 - 1,457 / 1,457
距離測定手段と障害物との間の放射された距離を検出するための方法および距離検出装置
この発明は、測距装置および障害物の表面の最近点間の放射された距離を測定するための方法および装置に関し、前記点および測距装置の間の放射された距離は、前記障害物のあらゆる点に関して本来的に最短である。この発明の目的は、前記点Pが、もはや前記測距装置の検出領域内に位置していないときに、最近点および測距装置の間の現在の距離を計算することである。この目的のために、放射された距離の計算は、前記測距装置と障害物との相対的移動に関する情報、およびこの発明にしたがって規定された限界距離に基づいてなされる。 (もっと読む)
制御領域内のアイテムの位置を追跡するよう倉庫を構成するシステム及び方法
制御領域内のアイテムの位置を追跡する位置追跡システムは、位置判定の要求精度によって配置される複数のRFIDタグを備える。追跡されるアイテムを運搬するよう構成される車両は、複数のRFIDタグからRFID情報を獲得し、RFIDタグ情報をロケーション・オーソリティに伝送するよう構成される2つのRFIDインテロゲータを含む。2つのRFIDインテロゲータの間隔は、要求精度が生じるような、複数のRFIDタグの間隔に基づいて設定される。ロケーション・オーソリティは、複数のタグ毎の各々について記憶される座標情報にRFIDタグを単にマッピングして、車両と、よって、運搬されるアイテムとの位置を得ることができる。 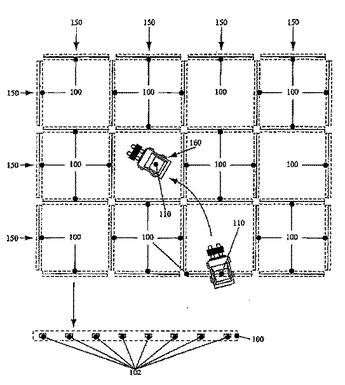 (もっと読む)
(もっと読む)
合成開口レーダシステム及び局所的な測位のための方法
測位システムは、固定された位置にあるパッシブな等方性反射標識と、デバイスとを含む。前記デバイスは、ある期間に渡って、円偏波を有する電磁パルスを送信し、帰還信号を受信する。前記帰還信号は、前記反射標識から反射されたパルスを含む。前記帰還信号から前記反射パルスを隔離するため、及び前記デバイスから前記反射標識への距離を決定するために、前記帰還信号を処理する。前記反射標識は、第1のパッシブ反射体と、第2のパッシブ反射体と、前記第1のパッシブ反射体を基準にした角度で前記第2のパッシブ反射体を静止して測位するように構成される静的構造とを含む。オプションとして、前記デバイスは、前記帰還信号を受信中に、ある特定の方向に移動し、前記帰還信号の前記反射パルス部分におけるドップラーシフトを検出し、前記特定の方向と、前記デバイスと前記標識間の直線との間の角度を決定する。
 (もっと読む)
(もっと読む)
自動車自身の速度を測定する装置
プリクラッシュセンサシステムを用いて自動車自身の速度を求める、自動車自身の速度の測定装置を提案する。測定は、道路表面で反射される信号に基づき行われる。当該測定は、車輪のロック状態または空転状態または浮遊状態のような所定の動作状態が生じている場合にのみ行われる。 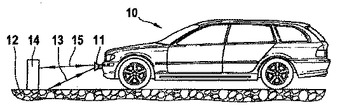 (もっと読む)
(もっと読む)
波形のシーケンスの生成
主シンボルシーケンスを生成し、シーケンス内の各シンボルをランダムに選択された波形に置き換えることにより、波形のシーケンスを生成する。主シンボルシーケンスは、狭い自己相関関数を有し、パルスの列であってもよく、それらパルスは、所定の構成のパケット内に配置される。波形を送信し、送信波形の表現を形成し且つその表現を遅延させ、その表現を、送信波形の反射の結果として受信される信号と相関させることにより、物体を検出することができる。 (もっと読む)
近接センシングシステム
大型の公共車両または商用車両のような車両のミラーハウジング部品の内部または近傍に取り付けられるかもしれない車両近接センシングシステムであって、車両の前面の近くにある障害物を検知する。たとえば、外部後方ミラーの下または運転者に見えない場所にある障害物を検知する。そして制御信号を同一車両の運転手台内に送信して、警告装置を使って運転者に警告する。 (もっと読む)
車両と衝突対象の間の相対速度を突き止める装置
車両と衝突対象の間の相対速度を突き止める装置を提案する。この装置は車両自体内に配置されている。この装置はアクティブな周辺センサシステム(10)とコンタクトセンサシステム(11)を有している。この装置は周辺センサシステム(10)の第1の信号とコンタクトセンサシステム(11)の第2の信号に基づいて相対速度を求める。 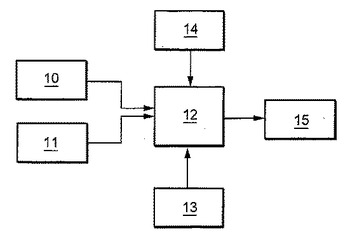 (もっと読む)
(もっと読む)
εフィルタを用いて信号を平滑化する装置

【課題】位相遅れを低減し、定常状態におけるゆらぎを抑制するフィルタを実現する。
【解決手段】εフィルタを用いて所与の信号を平滑化する装置は、所与の信号の変動幅をウェーブレット変換を用いて算出し、算出された変動幅に応じて、εフィルタのしきい値を設定する。所与の信号は、変動幅に応じてしきい値が設定されたεフィルタによってフィルタリングされる。所与の信号を移動平均する移動平均フィルタをさらに備えることができる。εフィルタは、移動平均された信号に対してフィルタリングを実行する。所与の信号は、エアフローメータ出力であることができ、εフィルタリングからの出力が、燃料噴射量を決定するのに用いられる。
(もっと読む)
車載レーダ装置の軸調整装置および軸調整方法

【課題】 広大な作業空間や大規模の計測装置類を必要とせず、容易に車軸調整が可能な車載レーダ装置の軸調整装置および軸調整方法を提案すること。
【解決手段】 電波レーダ4のレーダ波軸に一致するように軸調整された状態で電波レーダ4に取付けられたレーザポインタ3、車両1から一定間隔を置いて且つ車両1の車軸10に垂直に設置されると共にレーザポインタ3から発せられた光の光点12を反射するレーザポインタ反射板9、車軸10に対して軸調整されると共に車軸10に対して左右対称の位置に設置された少なくとも一対の発光源61、62を映し出す車載カメラ2、レーザポインタ反射板9に向けて車載カメラが撮影した映像を基に、光点12の移動先となるレーザ調整目標点11を計算する画像処理装置7、およびレーザ調整目標点11と光点12とをモニタ画像に表示するモニタ8を含む。
(もっと読む)
車両用運転支援装置
【課題】 車両の姿勢角を検出するための専用のセンサを使用することなく車載レーダのビームの上下角を適切に制御し、コスト低減とレーダ性能の向上とを同時に達成する。
【解決手段】 画像認識装置16でカメラユニット15で撮像した画像から道路の左右白線を認識して撮像画像平面上の近似直線を求め、この近似直線の交点から車両のピッチ角を推定し、このピッチ角に基づいてレーダヘッド11の上下方向のアンテナ角度を可変するアクチュエータ12に対する制御指令値を算出する。そして、コントローラ13を介してアクチュエータ12を駆動し、レーダヘッド11の電磁波放射方向を道路面と平行に維持することで、ピッチ角を検出するための専用のセンサを使用することなく、コスト低減とレーダ性能の向上とを同時に達成する。
(もっと読む)
車載レーダ装置
【課題】 車両取付時の放射軸調整が容易な車載レーダ装置を提供する。
【解決手段】 レーダ放射軸L1とレーザポインタ光軸L2の水平座標が略一致するように、レーダ装置1にレーザポインタ7を一体的に固定する。このときに生じたレーダ放射軸L1と光軸L2との水平方向のズレ角は角度記憶手段4に記憶しておく。レーダ装置1は、目標物に向けて発したレーダの反射波より、水平角度算出手段3で目標物の水平角度位置を算出し、さらに、この算出した水平角度位置を、角度記憶手段4に記憶しておいた角度値を用いて補正する。
(もっと読む)
標識設置方法
【課題】 車両の前方を監視するセンサの取付角度を調整する基準点をなす標識を設置する標識設置方法において、センサを車両に取付る角度の調整が、その前方に広大な空間を必要とすることなく、狭い空間であっても簡易かつ正確に実施できる標識設置によるセンサの取付角度調整方法を実現することを課題とする。
【解決手段】 紐23の一端をトランクカバー12に固定し、トランクカバー12を開いた状態で、紐23を車両10に付された基準点上を通過するように車両前方に延ばし、車両前方に延ばされた紐23を基準にして標識21を設置することを特徴とする。
(もっと読む)
ドップラ式対地速度計
【課題】 ドップラシフト測定用の送信波の入射角および反射波の反射角が変化して測定ドップラシフト値ひいては、それから演算される速度値に影響を及ぼすことを防止し、常に高精度の速度測定を行う。
【解決手段】 超音波もしくは電波である送信波(4)を路面(5)に向けて照射し、反射波(6)のドップラ効果による周波数偏移を検出して、対地速度(V)を測定する速度計において、送信器(3)からの送信波(4)をオフセットパラボラ型の反射器(10)で反射させて路面(5)に当て、路面からの反射波(6)を別のオフセットパラボラ型反射器(12)で反射させて受信器(7)で受信する。
(もっと読む)
信号待ち居眠り目覚まし器
【課題】 車の運転中における,信号待ち等の時間に睡眠を取るための目覚まし器に関する
【解決手段】 車を運転中,赤信号等で停止した時,自分の車の前に停止している車との距離を測定し,この距離の変化を監視しながら,距離がが変化したとき運転者に目覚まし信号を発信することを特徴とした目覚まし器。
(もっと読む)
物体の検出方法、障害物検出方法及び障害物検出装置
【課題】より短時間で一定範囲内の物体を検出できるようにすることである。
【解決手段】筐体21を所定角度範囲回転させて、遠距離用アンテナ11a、中距離用アンテナ11b、短距離用アンテナ11cから同時に電波を放射し、それぞれの反射波を受信して一定範囲内の物体を検出する(図3,S11)。処理装置13は、遠距離用アンテナ11a、中距離用アンテナ11b、短距離用アンテナ11cの反射波から得られるそれぞれの検出データをマージして一定範囲内にある物体の検出データを得る(S13)。さらに、その検出データから障害物を抽出する(S14)。
(もっと読む)
レーダ装置
【課題】 IQバランスの悪化により、偽スペクトルが発生し、距離,相対速度演算時間が増大するのを防止する。
【解決手段】 送信電磁波を出力する送信手段と、送信電磁波が目標物体で反射されて戻ってきた受信電磁波をIQ位相検波する受信手段と、この受信手段の出力信号を、FFT処理する信号変換手段と、この信号変換手段で変換されたデータの中に周波数の絶対値が同じで正負の両方に振幅レベルのピーク値を持つ一対のスペクトルがあれば、振幅レベルのピーク値の大きい方が真のスペクトルであると判定し、判定された真のスペクトルの周波数を用いて、目標物体との距離,相対速度を演算する信号処理手段とを備えたものである。
(もっと読む)
FMCWレ―ダ装置及び記録媒体
【課題】 移動物と静止物を正確に認識できるFMCWレーダ装置及び記録媒体を提供すること。
【解決手段】 ステッフ゜200では、周波数シフト量の幅を決定する。ステッフ゜210では、周波数シフトを行う。ステッフ゜220では、評価値|Vp|を算出する。ステッフ゜230では、近傍和Sum2を算出する。ステッフ゜240では、スペクトル全体和Sum1を算出する。ステッフ゜270では、全てのスペクトル全体和Sum1の値を比較して、真の周波数シフト量TSnを決定する。ステッフ゜280では、真の周波数シフト量にて周波数シフトしたスペクトルに関し、スペクトルピークの近傍和Sum2が閾値Thp以下か否かを判定する。ステッフ゜290では、移動物予測フラグがセットされているか否かを判定する。ステッフ゜300では、近傍和Sum2が閾値Thp以下で且つ移動物予測フラグがセットされていないので、そのスペクトルピークは静止物のスペクトルピークであると判断する。
(もっと読む)
1,441 - 1,457 / 1,457
[ Back to top ]