
Fターム[5J070AF04]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473) | 無人車 (16)
Fターム[5J070AF04]に分類される特許
1 - 16 / 16
受信波の相関行列算出装置及び受信波の相関行列算出方法、並びに波源方向推定装置及び波源位置推定装置
【課題】波源の帯域幅が狭い場合にも波源相互相関値を低減することができる受信波の相関行列算出装置を提供する。
【解決手段】受信波の相関行列算出装置は、アレーアンテナ24aにより電波を受信して相関行列を算出する。受信波の相関行列算出装置は、受信波の方向行列の位相を回転し、位相回転された方向行列を含む相関行列を周波数平均して平均化された相関行列を算出する。
(もっと読む)
受信波の相関行列算出装置及び受信波の相関行列算出方法、並びに波源方向推定装置及び波源位置推定装置

【課題】波源の帯域幅が狭い場合にも波源相互相関値を低減することができる受信波の相関行列算出装置を提供する。
【解決手段】受信波の相関行列算出装置は、アレーアンテナ24aにより電波を受信して相関行列を算出する。受信波の相関行列算出装置は、受信波の各周波数における方向行列を所定の周波数における方向行列へ変換し、所定の周波数における方向行列の位相を回転し、位相回転された方向行列を周波数平均して平均化された相関行列を算出する。
(もっと読む)
自律移動装置及び平面状障害物認識方法
【課題】平面状障害物の位置を単純な手順により認識可能とし、正確に自己位置を特定して、効率的で安全な自律走行を可能とする。
【解決手段】レーザビームを用いて水平面内をスキャンし、複数のスキャンポイントの座標を取得し、得られた順番が時系列的に前後する2つのスキャンポイントについて、前のスキャンポイントを始点とし後のスキャンポイントを終点とする要素ベクトルを形成し、複数の要素ベクトルの中から、得られた順番が時系列的に前後し、かつ互いに連続する複数の要素ベクトルであって、その長さがそれぞれ第1所定長以下であり、1つの要素ベクトルに対してそれに連続する他の要素ベクトルがなす振れ角度が第1所定角度以下であり、振れ角度の積算値が第2所定角度以下であるものをベクトル合成し、始点と終点により定義される線分が第2所定長以上であるときに、そのスキャンセグメントベクトルに沿って平面状障害物が存在していると認識する。
(もっと読む)
移動物体検出装置および自律移動物体
【課題】混雑環境下での移動物体の精度よいトラッキングが行える移動物体検出装置および移動ロボットを提供すること。
【解決手段】空間の混雑度を測定してトラッキングに利用するもので、方向成分では、混雑度が低ければレーザレンジセンサの計測値を重視し、混雑度が高くなると画像処理結果を重視したセンサフュージョンを行い、得られた移動物体推定方向に対してレーザレンジセンサの計測結果から距離を求める。
(もっと読む)
側位システムおよび無線通信装置
【課題】移動局と基地局および基地局同士の同期システムが不必要であり、設置する基地局数が最低1個あれば移動局の位置を算出することの可能な側位システムを提供する。
【解決手段】1つの基地局200により側位の対象となる移動局100は、タイミング信号をトリガにして生成された超広帯域(UWB)方式による信号を基準拡散符号(PN0)で拡散して基準拡散信号とする基準拡散器104と、基地局から反射信号を受信する第1、第2の受信部110、118と、第1の受信部で受信した信号から所定の拡散符号(PN1)との相関により反射信号を検出する第1の相関器114と、第2の受信部で受信した信号から所定の拡散符号(PN1)との相関により反射信号を検出する第2の相関器118と、第1、第2の相関器により検出された反射信号とタイミング信号との時間差を測定する時間差測定部126とを備える。
(もっと読む)
物体検出手段の試験装置、及び試験車両
【課題】物体検出手段の試験コストを低く抑えつつ、試験精度を向上させることが可能な物体検出手段の試験装置、及び試験車両を提供する。
【解決手段】試験装置10は、物体検出手段20,22を取り付ける取付部12と、物体60を検出する検出位置である第1位置と物体60との衝突を回避する第2位置との間で、取付部12を位置切換可能に支持する支持部14と、支持部14を駆動して第1位置と第2位置との間で取付部12の位置を切り換える駆動部16と、を備える。この試験装置10が車両40の荷台42に搭載され、試験車両100が構成される。
(もっと読む)
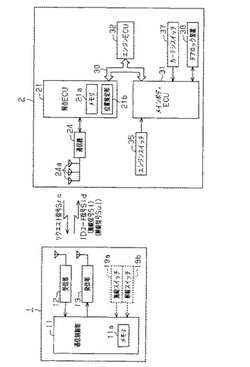
アクテイブタグ装置
【課題】発信手段の方向および発信手段と受信手段の距離を精度良く検知する。
【解決手段】発信手段1の指向性アンテナの方向31に対向して受信手段2の指向性アンテナ21a,21bを向け、アンテナ21a,21bを切替えた時に受信した高周波信号のタイミング又は振幅又は周波数又は位相又はこれらの組合わせを検知し、発信手段1の方向や発信手段1と受信手段2の距離を検知する。特定エリアの内部や周辺部に沿って複数の発信手段1又は受信手段2あるいは発信手段1又は受信手段2に接続された複数のアンテナ又は複数の送受波器が設置され、あるいは発信手段1のアンテナ又は送受波器が複数の放射素子を有する漏洩ケーブルであり、漏洩ケーブルが特定エリアに沿って設置され、又は特定エリアを囲い又は区分するように設置される。
(もっと読む)
移動体の追従方法
【課題】従来の移動体の追従方法は、現在の追従目標物体、またはその経路を目標として追従移動を行っており、結果として、目標追従物体の背後を追従することであった。
【解決手段】本発明の移動体の追従方法は、追従目標物体1の位置を検出し、検出した位置を包含する3次元領域を求め、求めた3次元領域の所定の位置を目標として移動体2を移動させ、追従目標物体1に追従させることができ、追従目標物体1から一定領域離れた位置に移動体2が位置することで、追従目標物体1と安全かつ適切な位置関係を保つことができる。
(もっと読む)
被測定物検出装置
【課題】電磁波を周囲空間に走査することによって形成される平面状の走査領域の形態を、容易に変更可能な被測定物検出装置を提供する。
【解決手段】電磁波を周囲空間に走査して平面状の走査領域を形成し、走査領域内で反射して戻ってきた電磁波に基づいて走査領域内に存する被測定物を検出する被測定物検出装置本体2の周囲空間に、電磁波を反射して走査領域の形態を変更する反射部3を配置した。
(もっと読む)
自律移動装置及び平面状障害物認識方法
【課題】自律移動装置において、平面状障害物の位置を容易に認識可能とし、自己位置を特定して、効率的で安全な自律走行を可能とする。
【解決手段】レーザビームを用いて水平面内をスキャンし、反射波を受信して複数のスキャンポイントの座標を取得し、得られた順番が時系列的に前後する2つのスキャンポイントについて、前のスキャンポイントを始点とし後のスキャンポイントを終点とする要素ベクトルを形成し、時系列的に前後し、かつ互いに連続する複数の要素ベクトルであって、要素ベクトルの長さがそれぞれ第1所定長以下であり、振れ角度が第1所定角度以下であり、振れ角度の積算値が第2所定角度以下であるものを選択し、ベクトル合成して1つのスキャンセグメントベクトルし、スキャンセグメントベクトルの始点と終点により定義される線分が第2所定長以上であるときに、そのスキャンセグメントベクトルに沿って平面状障害物が存在していると認識する。
(もっと読む)
自走式ロボット
【課題】 自走式ロボットの周囲の障害物を正確に検出する。
【解決手段】 進行方向V1に対して、超音波発信器s2を中心として、等間隔に、3台の超音波発信器と4台の超音波受信器とが交互に配設されている。ここでは、進行方向V1に向かって左側から、超音波受信器r1、超音波発信器s1、超音波受信器r2、超音波発信器s2、超音波受信器r3、超音波発信器s3、超音波受信器r4の順に配設されている。また、本体部10の中心点Oを通り、進行方向V1に平行な直線である中心線LSについて、3台の超音波発信器と4台の超音波受信器とが線対称な位置に配設されている。
(もっと読む)
自律走行車及びその制御方法
【課題】現場に固定された検出対象物を検出することにより基準方位を読み取ってジャイロセンサの基準方位の設定を行う自律走行車において、検出対象物の設置を容易にし、正確な走行制御を行う。
【解決手段】現場に仮想として配置されるXY座標上の点として特定されている2点以上の位置にそれぞれ固定された検出対象物(リフレクタR1〜R4)をレーザ・スキャナ44によって検出して得られた情報に基づき、XY座標上の自車の方向αを算出する。これを走行ルート始点5等において行い、自車の方向αに基づきジャイロセンサの基準方位を設定する。ジャイロセンサの検出信号に基づき走行ルート4に沿った走行を制御し、リフレクタの設置数は極力少数に抑えた。
(もっと読む)
埋設物探査装置
【課題】従来の構造では地上高が高いため、路上に設置された電柱の固定用ケーブル、標識、ガードレールなどの設置物に画像表示部やフェードが干渉し、設置物の下に路面が続いているにもかかわらずその地中を探査することができない。
【解決手段】埋設物探査装置40は、2個の固定車輪31と1個の自在車輪32が取り付けられ、斜め上方に伸びたハンドル部10の上端部に水平に取り付けられた2つの握りハンドル12を押すことにより自在に移動できる台車30を有している。台車30は、地中に電磁波を送受信する図示しないアンテナエレメントを有する送受信部37及び信号処理部38とを内部に備え、さらに、台車30後方に配置されたバッテリ33と、ハンドル部10に設けられた画像表示部11とを有している。
(もっと読む)
ロボットの走行軌道制御システム
【課題】 ロボットの移動方向を定める上で必要な情報を、ICタグから確実に取得することができる走行軌道制御システムを提供する。
【解決手段】 放射方向に向いた複数のICタグで構成される移動標識モジュールと、走行機能を備えたロボットとからなり、移動標識モジュールをロボットの移動空間内の床、天井、壁、備品、障害物等の物体に取り付けて、移動標識モジュールのICタグに記憶された情報を、いずれの方向からでもロボットが読み取ってロボットが取得した情報に基づいて自律移動するようにする。
(もっと読む)
無線タグの位置推定システム
【構成】無線タグの位置推定システムは、所定空間に配置された複数の無線タグ読取機14を含む。この所定空間に配置された読取機14による検出に基づいて、その検出時刻における所定空間内の無線タグの位置が推定される。その位置の推定された無線タグを目標として移動型ロボット16の移動が制御させる。移動型ロボット16には無線タグ読取機18が設けられている。この読取機18によって目標とされた無線タグが検出されたとき、読取機18による検出に基づいて、当該検出時刻における当該無線タグの推定位置座標が算出されて記録される。
【効果】無線タグの位置をより正確に推定することができる。
(もっと読む)
ドップラ式対地速度計
【課題】 ドップラシフト測定用の送信波の入射角および反射波の反射角が変化して測定ドップラシフト値ひいては、それから演算される速度値に影響を及ぼすことを防止し、常に高精度の速度測定を行う。
【解決手段】 超音波もしくは電波である送信波(4)を路面(5)に向けて照射し、反射波(6)のドップラ効果による周波数偏移を検出して、対地速度(V)を測定する速度計において、送信器(3)からの送信波(4)をオフセットパラボラ型の反射器(10)で反射させて路面(5)に当て、路面からの反射波(6)を別のオフセットパラボラ型反射器(12)で反射させて受信器(7)で受信する。
(もっと読む)
1 - 16 / 16
[ Back to top ]