
Fターム[5J070AF10]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | その他 (21)
Fターム[5J070AF10]に分類される特許
1 - 20 / 21
車両検出装置、通信装置、および、車両検出システム
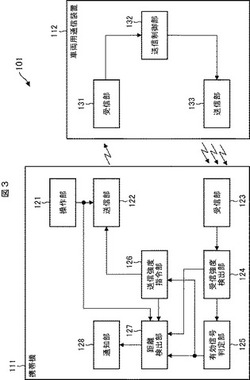
【課題】車両までの距離の検出精度を向上させる。
【解決手段】車両用通信装置112は、送信強度が異なる複数の距離検出用信号を送信する送信部133、携帯機111からの指令を受信する受信部131、携帯機111からの指令に基づいて、距離検出用信号の送信強度を調整する送信制御部132を備える。携帯機111は、各距離検出用信号を受信する受信部123、各距離検出用信号の受信強度を検出する受信強度検出部124、受信強度が有効範囲内にあるかどうかを判定する有効信号判定部125、受信強度が有効範囲外である距離検出用信号の送信強度の調整を指令する送信強度指令部126、受信強度が有効範囲内である2以上の距離検出用信号の受信強度に基づいて、車両までの距離を検出する距離検出部127を備える。本発明は、例えば、カーファインダシステムに適用できる。
(もっと読む)
衝突回避装置、ヘリコプタ、及び衝突回避プログラム

【課題】ヘリコプタが障害物に近接した状態でも、ヘリコプタの障害物への衝突を回避する飛行を可能とする、ことを目的とする。
【解決手段】ヘリコプタ10は、GPS受信部34によって、受信したGPS信号に基づいて自機の位置を検知し、距離センサ18によって、自機と周囲の障害物との距離を測定する。そして、ヘリコプタ10は、詳細情報生成部40によって、地図情報記憶装置52に記憶されている地図情報から距離センサ18で検知した自機の位置を含む自機周囲情報を読み出し、読み出した自機周囲情報と距離センサ18による測定結果とから、自機の周囲の形状を示す自機周囲詳細情報を生成し、飛行制御部32によって、自機周囲詳細情報と自機の大きさとに基づいて、自機が障害物へ衝突することを抑制するための制御を行う。
(もっと読む)
位置検出装置
【課題】 人や物、動物といった種々の対象に適用することができ、簡易なシステム構成で、容易に位置検出できる実用性の高い位置検出装置を得る。
【解決手段】 車載機1は、小電力データ通信可能な無線部11と、無指向性アンテナ部12と、識別情報を含む信号を生成しアンテナ部12を介して全方位に電波出力させる制御部13と、送信側制御部を駆動する操作部14を有し、移動機2は、車載機1の送信電波を受信可能な高指向性アンテナ部22と、受信電界強度を検出する無線部21と、識別情報から受信電波を判別し、受信電界強度から自動車Cとの距離およびアンテナ部22の向きに応じた位置信号を出力する制御部23と、位置信号を受けて自動車Cの遠近情報を表示する表示部25と、位置表示要求信号を出力する操作部24を設ける。
(もっと読む)
車両検索システム
【課題】車両の方向の情報と共に該情報の信頼性の情報が表示され、高い信頼性の下で車両の方向を検索できる車両検索システムを提供する。
【解決手段】車両検索システム1は、携帯機2から観た絶対方位を検出する電子コンパス22と、車両3から観た携帯機の相対方向を検出すると共に当該車両に到来する到来電波の電波強度を測定するアレーアンテナ33a,33dと、車両3から観た絶対方位を検出する電子コンパス32と、携帯機2の相対方向の情報と車両3から観た絶対方位の情報とに基づき、車両から観た携帯機の絶対方向を演算する車両側制御部31と、車両3から携帯機2に送信された同車両3から観た携帯機2の絶対方向の情報と、携帯機2から観た絶対方位の情報とに基づき、同携帯機2から観た車両3の相対方向を演算する携帯機側制御部21と、車両3の相対方向の情報を表示すると共に、電波強度の情報を所定の表現手段で表示する表示部25とを備える。
(もっと読む)
アクティブレーダオーギュメンテーション
【課題】 対象目標の電波反射断面積(RCS)は誘導弾や地上装置のレーダとの相対位置関係によって変化するが、従来はRCSを一定としてレーダ評価試験を行うのみであり、このため実目標(航空機、誘導弾等)を実際に飛行させないと、実目標の模擬を行うことができなかった。
【解決手段】 アクティブレーダオーギュメンテーションが備える受信機は、誘導弾との相対位置関係(Az、El)および周波数を計算する計算機、対象目標(航空機、誘導弾等)に応じたRCSモデルのデータベースを備える。これにより実目標(航空機、誘導弾等)を実際に飛行させることなく、実目標の模擬が可能とした。
(もっと読む)
タググループの設定方法及び移動体位置監視システム
【課題】 グループIDコードの設定が不要で、グループからの離脱が確実に検出でき、しかも離脱したタグの位置をユーザーが知ることができるタググループの設定方法を提供する。
【解決手段】 マスタタグは記憶領域として少なくとも、書き換え不能な複数ビットのIDコードを記憶する固定領域と、書き換え可能な複数ビットを有する可変領域を有し、スレーブタグは少なくとも書き換え不能で、且つマスタタグと同一ビットのIDコードを記憶する固定領域を有し、マスタタグの可変領域は、少なくともグループ情報領域を備え、当該グループ情報領域には、複数ビットのIDコードの内、グループIDコードとして使用する領域を指定する情報を設定し、タググループは、各タグ自身のIDコードの内、グループ情報領域でグループIDコード領域と指定されたIDコードの部分が同一のタグとする。
(もっと読む)
個体管理システム
【課題】無線通信装置を利用した自動認識技術を用いて、物品を管理するための個体管理システムを提供する。
【解決手段】管理対象物には個体管理装置が付され、個体識別装置は該個体管理装置との無線通信が可能であり、個体情報管理装置は個体識別装置との通信が可能な構成を有する。個体管理装置はセンサ等の検知部を有し、個体識別装置は個体管理装置との距離を算出する位置解析部を有する。個体管理装置と個体識別装置の間の距離、及び個体管理装置が有する検知部からの情報が個体識別装置に送られ、システムの利用者が個体管理装置の位置を正確に特定することが可能になる。
(もっと読む)
方向探索システム
【課題】簡易な操作で目的の自動車が存在する方向を示すことができる方向探索システムを提供する。
【解決手段】第1回目のスキャンで、スイッチ31を押しながらスマートキー等の鍵金属部を指向性のあるアンテナ10として利用した端末装置2を回転させ、探索対象の自動車に搭載された車載装置1からの無線信号を受信し、その最大受信レベルをピーク検出保持部27に保持する。第2回目のスキャンでは、スイッチ31を離し、再び端末装置2を回転させ、探索対象の自動車に搭載された車載装置1からの無線信号を受信する。このとき、レベル検出部25で検出した受信レベルを比較部28に与え、第1回目のスキャン結果で保持された最大受信レベルと比較する。そして、受信レベルが最大受信レベルにほぼ等しくなったときに、探索が達成したことを表示部40に表示する。
(もっと読む)
小便器洗浄システム
【課題】複数のドップラーセンサから発信される電波同士が干渉して、自動洗浄機能が誤作動することを防止した小便器洗浄システムを提供する。
【解決手段】ドップラーセンサにより人体や尿を検知して使用後の便器を自動洗浄する自動洗浄機能を備えた複数の小便器を併設してなる小便器洗浄システムにおいて、複数の小便器のうちの一つに設けられた制御手段は、各小便器に設けた各ドップラーセンサを、その動作期間が互いに重複しないように間欠動作させるべく、他の小便器の制御手段へ、通信手段を介してドップラーセンサの動作タイミングを指定する動作タイミング情報を送信する主制御機能を実行し、この動作タイミング情報を受信した各制御手段は、動作タイミング情報に基づいて、各ドップラーセンサをそれぞれ間欠動作させる従制御機能を実行することにした。
(もっと読む)
視力測定システム,情報処理装置,遠隔操作装置,情報処理方法,遠隔操作方法およびコンピュータプログラム
【課題】 空間的制約のある場所においても,簡易な方法で視力を測定する。
【解決手段】 遠隔操作装置104を操作するユーザの視力を測定する情報処理装置102に,装置間距離を測定する距離測定部122と;装置間距離,視力測定の視標として表示される視力検査画像の大きさ,および視力測定結果の対応関係を示した視力換算情報記憶部128と;所定の大きさの視力検査画像を表示する画像表示部134と;遠隔操作装置を介して入力された視力検査画像の認識結果と,表示された視力検査画像とを比較する比較部136と;比較部の比較結果に応じて,画像表示部に表示された視力検査画像の大きさを調整する画像調整部138と;距離測定部により測定された装置間距離と,画像表示部に表示された視力検査画像の大きさとに対応する視力測定結果を,視力換算情報記憶部から抽出する視力測定結果抽出部126と;を備える。
(もっと読む)
アンテナ・トランシーバー・システム
音声、デジタルデータ、レーダー信号およびIR信号を送信し受信し、そして処理するアンテナ・トランシーバ−・システム100が提供される。本システム100は、複数の放射素子110,112,114を有するアンテナアレイ102を含んでおり、各素子110,112,114は、送受信(T/R)モジュール104,106,108に接続されている。各T/Rモジュール104,106,108は、入力信号のビームパスに沿ってリターン信号を送信する位相器200,202,204と位相共役モジュール206,208,210を含んでいる。本システム100は、コンパクトなタイル400に統合されている垂直に整列されている複数の平面402に配置されている。本タイル400は、ユーザのヘッドギア500中に埋め込まれており、システムのハンドフリーな操作が可能となる。代わりに、本システム100は、車両700、人間が持ち運びできるバックパック800、または他の指定されたプラットフォームに統合することもできる。 (もっと読む)
埋設された長尺物体の探査装置および探査方法
【課題】被探査領域に埋設された合成樹脂管等の長尺物体を探査するための探査装置および探査方法を提案する。
【解決手段】本発明に係る探査装置(1)は,演算手段(7)および表示手段(8)を有する評価ユニット(6)を具え,さらに,被探査面(F)に沿って移動可能であり,かつ,探査経路センサ(10)と,アンテナ(12a)が設けられた送受信ユニット(11a)とを有する手持ち式の探査ヘッド(9)を具える。前記アンテナは,被探査面(F)内で相互に離間して配置された少なくとも2個のアンテナ(12a,12b)を含み,これらアンテナ(12a,12b)の被探査面(F)内における間隔が5cm〜50cmの範囲内に設定されている。
(もっと読む)
行動検出システム
【課題】 低コストでかつ日頃の徘徊の程度のような行動パターンを容易に検出可能な行動検出システムを提供する。
【解決手段】 行動検出システムは、人が保持し、トリガー信号に応答してID番号を出力するIDタグと、それぞれが異なる機能を提供する複数の位置にそれぞれ設けられ、トリガー信号を発信するトリガー信号発信部と、IDタグの出力したID番号を受信するトリガー信号受信部と、複数のトリガー信号受信部に接続され、トリガー信号受信部の受信したID番号をその受信時刻とともに保持するデータ保持手段と、データ保持手段の保持するデータの中から、特定の人のデータを抽出する抽出手段と、抽出手段の抽出したデータに基づいて、所望の表示を行なう表示手段とを含む。
(もっと読む)
未知の障害物の中の予測不可能な目標物の実時間追跡
本発明の実施例は、環境内の障害物の配置についての事前の知識を必要とせず、ロボットが追跡する目標物の軌跡も知らずに、障害物のある環境内で動作する移動ロボットの運動を計算するための計画を提供する。本発明の実施例は、目標物の位置と環境内の障害物の位置の測定結果に基づいて、監視ロボットの運動を支配するアルゴリズムを提供する。アルゴリズムは目標物と障害物によって作られた監視者の視野領域との間の幾何学的配置を計算によって記述し、この記述を用いて連続的な制御則を計算する。本発明の実施例は、逃走経路ツリーデータ構造を使用して目標物の監視ロボット検出器からの逃走について起こり得るモードを分類し、逃走経路ツリーを用いて目標物の最短逃走経路を決定する。  (もっと読む)
(もっと読む)
監視システム及び監視方法
【課題】
高齢者介護等で利用可能な監視システムを安価で簡単な装置により実現するとともに、操作が容易で実用性の高いシステムを提供する。
【解決手段】
携帯可能で且つ特定のタグIDを選択して電波信号を送受信する親機1を所定位置に設置するとともに、携帯可能で且つ親機1から受信した電波信号に応じて電波信号(応答信号)を送受信する子機2を監視対象物に取付け、監視モードにより子機2からの電波信号の受信状態を表示又は音響出力することによって、所定領域内への監視対象物の進入を監視し、捜索モードにおいて親機1を移動させつつ、監視モードにおける通常時の電波強度よりも強い電波強度から段階的に電波強度を弱くしていくことにより監視対象物を捜索する。
(もっと読む)
物の所在検査
非接触で読取り可能なデータ・キャリア(T1、T2、T3、T4)によって特徴付けられた物(1、2、3、4)の所在を検査する方法において、その所在が検査される物のデータ・キャリアが1つの検査グループ(UG)に割り振られ、非接触で読取り可能な各データ・キャリアは一意にあるいはグループで識別されることができる。データ・キャリア(T1〜T6)はデータ・キャリア読取り手段(5)によって検出され、検出されたデータ・キャリア(T1〜T6)の少なくとも1つが、活性化グループ(AG)に割り振られているかどうかが検出される。検出されたデータ・キャリア(T4、T5)の少なくとも1つが活性化グループ(AG)に割り振られている場合、所在検査が活性化され、その所在検査中に、検査グループ(UG)に割り振られた全データ・キャリア(T1〜T4)がデータ・キャリア読取り手段(5)によって検出されたかどうかが検査され、そうでない場合には警告信号(AL)が伝送される。 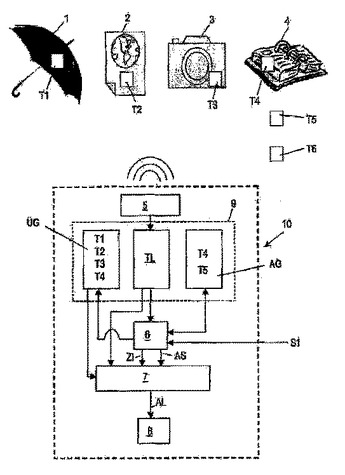 (もっと読む)
(もっと読む)
位置情報取得システム、携帯端末装置、および位置情報取得方法
【課題】 安価で効率的に施設利用者の位置情報を取得するとともに、メンテナンスの簡便化を図ること。
【解決手段】 携帯端末装置100は、識別情報保持装置200aや識別情報保持装置200bへ無線で電源を供給し、これらの識別情報保持装置200a、200bに保持されている装置固有の識別情報を読み取る。そして、携帯端末装置100は、自装置の識別情報と識別情報保持装置200a、200bの識別情報とを情報処理装置300へ送信する。情報処理装置300は、携帯端末装置100から送信された識別情報のうち、識別情報保持装置200a、200bの識別情報に対応する位置情報を検索し、この位置情報を携帯端末装置100へ返信する。
(もっと読む)
移動体の位置把握方法および装置
【課題】 区画されたエリアの領域に位置する移動体を自動的に正確、かつ低コストで把握することができる方法および装置を提供する。
【解決手段】 読取装置が各読取位置で読取ったエリアタグおよび目標タグの識別符号が各読取位置情報とともに記憶される。読取装置のX軸およびY軸方向の移動に対してエリアの前側に位置する前側辺と後側に位置する後側辺の両端に配備された両端エリアタグが読取装置の移動に連れて読取装置に夫々読取られるエリアが対象エリアとされる。読取装置が対象エリアの前側辺から後側辺まで移動した間に、読取装置に読取られた目標タグが候補目標タグとして選別される。読取装置のX軸およびY軸方向の両移動のいずれにおいても候補目標タグとして選別された目標タグが対象エリアの領域に位置する移動体の目標タグとして特定される。
(もっと読む)
迷子捜索システム
【課題】 大型施設内で子供が迷子になっても迷子センター等に出向くことなく迷子の発生通報が行えると共に迷子の位置捜索を容易に行なうことができる、迷子捜索システムを得る。
【解決手段】 迷子センター等に親局を設置し、該親局とネットワーク接続した中継局を多数配置する。また、入園した親子に夫々固有のIDコードを設定した無線端末機を持たせる。子供が迷子になった場合には、親が所持する親用端末機の捜索スイッチを入れることにより、最寄りの中継局を経由して親局に迷子発生の通報を行う。親局は当該親用端末機に設定されたIDコードを読み取り、多数の中継局より当該IDコードに対応する子供用端末機に対して捜索用信号を送信する。子供が持つ子供用端末機は少なくとも1つ以上の中継局と通信を行うことにより親局は当該子供用端末機に一番近い中継局を特定し、迷子の位置捜索を行うことができる。
(もっと読む)
無線ローカルエリアネットワーク(WLAN)チャネル無線周波数識別(RFID)タグシステムおよび方法
無線ローカルエリアネットワーク(WLAN)無線周波数識別(RFID)タグシステムは、無線ローカルエリアネットワーク(WLAN)内の位置検出にWLANチャネルを使用する。WLANとの干渉を回避するために、スニファ回路を用いて進行中のネットワーク通信がないことを確認するか、またはRFIDタグからの送信がWLANの標準の受信装置に無視されるように符号化シーケンスまたはプリアンブルを変更するか、またはWLANの標準の信号を用いてWLAN内のユニットに該当しないアドレス宛てにメッセージを送信する。WLAN内の複数の位置探知ユニット(LU)と1つのマスタユニット(MU)とを使用してRFIDタグからの送信を受信し、このタグから複数の位置探知ユニットが受信した複数の信号間の差に基づく三角測量によってこのタグの位置を求めることができる。マスタユニットは、これらの複数の位置探知ユニットから信号情報を受信し、タグの位置を計算する。到着時間差(TDOA)、受信信号強度表示(RSSI)、または他の三角測量手法を使用しうる。 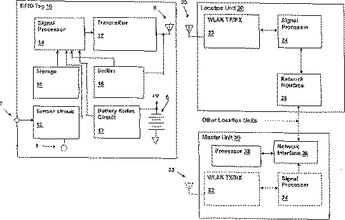 (もっと読む)
(もっと読む)
1 - 20 / 21
[ Back to top ]