
Fターム[5J070AG07]の内容
レーダ方式及びその細部 (42,132) | ビーム形状又はビーム走査 (558) | ビーム走査 (306)
Fターム[5J070AG07]の下位に属するFターム
不均一走査 (10)
ステップ走査 (39)
コニカルスキャン (3)
ロゼットスキャン
螺旋スキャン (3)
シーケンシャルスキャン (5)
Fターム[5J070AG07]に分類される特許
1 - 20 / 246
自律移動システム、その制御方法及びプログラム
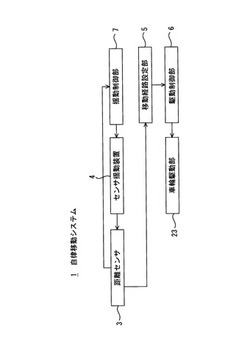
【課題】距離検出手段の揺動範囲を適切に設定し、最適に障害物を検知できる自律移動システム、その制御方法及びプログラムを提供すること。
【解決手段】自律移動システムは、移動体に設けられ、検出領域内の障害物の距離を検出する距離検出手段と、距離検出手段の検出領域をヨー方向へ揺動させる揺動手段と、揺動手段の揺動を制御する揺動制御手段と、を備えている。また、揺動制御手段は、障害物の位置に応じて、揺動手段を制御して距離検出手段の検出領域の揺動範囲を制限している。
(もっと読む)
ビーム管理装置及びこれを備えたレーダ装置並びにビーム管理方法及びプログラム

【課題】 特定のAPAAに割り当てられた追尾目標が増加した場合でも、他のAPAAの捜索性能を保ちながら、追尾目標に対する追尾ビームの照射頻度を維持する。
【解決手段】 ビーム管理装置10は、予め定められた捜索ビーム及び追尾ビームの照射タイミングからなる基本照射スケジュールaを記憶する基本照射スケジュール記憶手段11と、APAAに割り当てられた追尾目標bを入力する追尾目標入力手段12と、割り当てられた追尾目標bの数が増加し、予め定められた追尾ビームの数を越えた場合に、捜索ビームの照射に要する時間を短縮し、余った時間を追尾ビームの照射に利用するように照射スケジュールcを算出する照射スケジュール算出手段13と、を備えたことを特徴とする。
(もっと読む)
異常検出装置、および異常検出プログラム
【課題】障害物検出装置の異常を検出する異常検出装置において、簡素な処理で異常検出装置の異常を検出できるようにする。
【解決手段】レーダセンサにおいて信号処理部は、自車両の相対移動ベクトルと今回の処理開始までに求められた中心軸の方向とがなす角である偏向量を検出し、この偏向量が0に近づくように中心軸の方向を補正する。そして、この補正後の中心軸の方向を利用して、再度、偏向量を検出し、この偏向量がさらに0に近づくように中心軸の方向を補正する。このような処理を繰り返すことで、偏向量を段階的に0に収束させる。この構成において、偏向量の変化パターンが予め設定された基準パターンから逸脱する場合にレーダセンサに異常があると判定する(S210〜S230)。
(もっと読む)
無線端末方向探知装置
【課題】同周波数帯に干渉電力が存在する場合にも、精度の良い方向探知が可能な無線端末方向探知装置を提供する。
【解決手段】方位角θを変化させつつ(ステップS2、S9)、電力値を検出し(ステップS3)、検出した電力値に基づいて電力値パターンを生成し(ステップS11)、生成した電力値パターンを用いてタグ方向を判定する(ステップS12)。ただし、変調情報が正常に復調できるか否かを判断し(ステップS5)、正常に復調できない場合にはその変調情報に対応する電力値は用いず、補間により電力値パターンを生成する(ステップS11)。これにより、受信電力が大きくても、異なったシステムの無線端末からの電波の干渉が大きい電波を除去して無線端末の方向を探知することができる。よって、誤った方向を探知してしまうことが抑制できる。
(もっと読む)
レーダ装置、アンテナ制御方法、及びプログラム
【課題】アンテナ開口の方位の変更動作を行う際に、消費電力を抑えつつ、追尾を継続する。
【解決手段】アンテナ開口の方位の変更のために空中線部1−3を駆動させると、空中線部1−2のビーム走査範囲の端から空中線部1−3のビーム走査範囲の端までの範囲が、走査されない範囲となる。空中駆動部1−3を駆動させている間、空中駆動部1−3の駆動によって発生する走査されない範囲をカバーし、かつ空中駆動部1−2、1−3同士のビームの走査範囲が重複しないように、空中駆動部1−2、1−3のそれぞれのビームの走査範囲を逐次変更する。
(もっと読む)
レーダ装置
【課題】多面構造を有するフェーズドアレイ方式のレーダ装置において、いずれかの放射面が故障した場合等にも対処可能な高信頼性や運用面における多機能性を備えたレーダ装置を提供する。
【解決手段】非回転のフェーズドアレイ方式により全周方向についての捜索が可能なレーダ装置であって、フェーズドアレイアンテナによる複数のアンテナ面(空中線1a,1b,1c,1d,1e,1f)が多面体を形成するとともに、所定の方角を複数のアンテナ面のうち少なくとも2つのアンテナ面が捜索可能な覆域に含む空中線部と、空中線部が有する複数のアンテナ面のいずれかを選択し、選択したアンテナ面を介して送信信号を送信するとともに受信信号を受信する1以上の送受信機2と、1以上の送受信機2の各々に対応して設けられ、送受信機2により受信された受信信号に基づいて受信ビームを形成する1以上のビーム形成部3と、ビーム形成部3により形成された受信ビームに基づいて信号処理することで目標検出を行うレーダ信号処理部4とを備える。
(もっと読む)
イメージング装置およびイメージング方法
【課題】対象物体から放射や反射されるミリ波をアンテナやアンプなどで構成されるセンサによって計測してイメージングを行うイメージング装置において、メカ機構の負担を少なくし、さらに、計測有効範囲を拡大する。
【解決手段】センサ群124A,124Bを回転物体121の回転面に配置する。回転物体121を回転させることで、センサ群124Aが誘電体レンズ110により有効範囲1に結像された第1の被写体像IM1をスキャンし、被写体像IM1の各画素の信号が取得される。また、回転物体121を回転させることで、センサ群124Bが誘電体レンズ110および反射板126により有効範囲2に結像された第2の被写体像IM2をスキャンし、被写体像IM2の各画素の信号が取得される。反射板を動かしてスキャンを実現する従来技術に比べて、メカ機構の負担を少なくできる。計測有効範囲として、有効範囲1の他に、有効範囲2が加わる。
(もっと読む)
区画線検出装置および区画線検出方法
【課題】電磁波を送受信した結果に基づき区画線の検出を行う装置において、検出精度を向上させる。
【解決手段】近距離スキャンの1ライン分の測定データ(強度データ,距離データ,スキャン角度)を読み込み、読み込んだ強度データ列および距離データ列のそれぞれを微分することで、微分強度データ列および微分距離データ列を求める(S110〜S120)。微分強度データ列において正レベル,負レベルが連続し且つヌルレベルに挟まれた領域を候補範囲として抽出し(S130)、その抽出した候補範囲の中から、微分距離データ列の極性が、候補範囲に対応する部位で正,負,正(第1スキャン領域の場合)、又は負,正,負(第1スキャン領域の場合)と変化するものを、区画線からの反射が得られた対象領域として抽出する(S140)。
(もっと読む)
携帯機検知システム
【課題】比較的簡素な構成で、応答性よく携帯機の位置を検知することができる携帯機検知システムを提供する。
【解決手段】車両の進行方向を長手方向とする第1エレメント21と、車両の進行方向及び鉛直方向に垂直な方向を長手方向とし、第1エレメントに電気的に直列接続された第2エレメント22と、第1エレメント21と第2エレメント22の接続点に一端が接続された迂回配線200とを含むアンテナ20と、第1エレメント21に電力を供給する第1電力供給状態、第2エレメント22に電力を供給する第2電力供給状態、第1エレメント21及び第2エレメント22に電力を供給する第3電力供給状態の、3つの電力供給状態を切り換えると共に、電力供給状態を切り換えた際の携帯機からの応答信号に基づいて携帯機の位置を検知する携帯機検知手段(携帯機検知回路11、CPU12)を備える。
(もっと読む)
画像処理装置、レーダ装置、画像処理方法および画像処理プログラム
【課題】表示に視覚的な違和感が生じないように代表位置を決定する手法を実現した画像処理装置を提供する。
【解決手段】画像処理部17は、画像メモリ16から入力した画像データとテンプレート画像データとのマッチングを行う。例えば、一致度が最も高いテンプレート画像データを選定する。各テンプレート画像データには、それぞれ位置データが定めれており、画像処理部17は、選定されたテンプレート画像データに対応付けられている位置データに基づいて、入力した画像データの代表点を設定する。
(もっと読む)
電波到来方向推定装置および電波到来方向推定方法
【課題】電波到来方向を推定するための受信回路の構成を簡略にした、電波到来方向推定装置および電波到来方向推定方法を提供する
【解決手段】複数のアンテナ11は相対的な位置を固定して配置される。受信機1は、複数のアンテナの数より少ない数であって、所定の電波を受信する。時分割スイッチ14は、受信機1に同時には1つのアンテナ11が接続するように、受信機1とアンテナ11との接続を所定の周期で切り替える。直並列変換器4は、受信機1とアンテナ11との接続を所定の周期で切り替えて受信機1で受信した信号を、複数のアンテナ11のそれぞれで受信した信号に分配する。到来方向算出部5は、複数のアンテナ11のそれぞれで受信した信号に分配した信号から、受信した電波の到来方向を算出する。
(もっと読む)
位置推定装置及び位置推定方法
【課題】ビームアンテナを利用した位置推定において、高精度に位置推定を行なうことを課題とする。
【解決手段】位置推定装置は、指向性アンテナから出力されるビームの方向を制御し、制御された方向での指向性アンテナから出力されるビームを第1周波数で出力する。また、位置推定装置は、出力されるビームを第1周波数で出力した後に、第1周波数とは異なる第2周波数で出力する。また、位置推定装置は、第1周波数のビームの出力が到達した無線タグを有する端末装置から当該無線タグのIDを取得する。また、位置推定装置は、第2周波数のビームの出力が到達した無線タグを有する端末装置から当該無線タグのIDを取得する。また、位置推定装置は、第1周波数及び第2周波数のビームで共通に取得されたIDを特定し、特定されたIDとビームの方向とを出力する。
(もっと読む)
画像処理装置、これを搭載したレーダ装置、画像処理方法及び画像処理プログラム
【課題】移動する物標を固定物標と区別して表示できる機能を簡易な構成で実現できる画像処理装置を提供する。
【解決手段】レーダ装置5に搭載される画像処理装置10は、真航跡用画像メモリ42と、移動物標判定処理部44と、を備える。移動物標判定処理部44は、真航跡用画像メモリ42に記憶される物標の絶対的な位置変化を示す真航跡データ群から、他船の航跡を示す画素情報の値であって、所定の条件を満たす画素情報の値を有するトリガ画素を探索する。そして、移動物標判定処理部44は、トリガ画素から、物標が存在することを示す所定値が画素情報として設定されている画素まで所定方向で連続する一連の画素において、画素情報の値が、トリガ画素の画素情報の値から所定値に近づく傾向を示している場合に、所定値が設定される画素を移動物標が存在する画素位置と判定する。
(もっと読む)
気象レーダシステムとその降水強度算出方法及びプログラム
【課題】高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を同時に送信し、その反射波を受信する送受信装置11〜16と、送受信装置の受信信号から二重偏波観測を行って偏波毎の受信電力を算出する信号処理装置17とを備える気象レーダシステムにおいて、データ変換装置19は、受信電力をもとにレーダ波のビーム幅及びパルス幅に基づく高分解能でレーダ反射因子(Z)を算出し、受信電力の偏波間位相差(φDP)をもとに低分解能で比偏波間位相差(KDP)を算出し、比偏波間位相差(KDP)をもとに低分解能領域毎の平均降水強度(Rave[mm/h])を算出し、平均降水強度(Rave[mm/h])とレーダ反射因子(Z)とをもとに、レーダ反射因子(Z)と降水強度(R[mm/h])との間の関係式を推定し、関係式を用いて高分解能の降水強度(R[mm/h])を算出する。
(もっと読む)
自己位置推定装置、自己位置推定方法及びプログラム
【課題】自己位置の推定を高精度に行うこと。
【解決手段】自己位置推定装置10は、検出領域内の物体との距離情報を検出する距離センサ11を備え、距離センサ11により検出された物体との距離情報に基づいて、自己位置を推定する。また、自己位置推定装置10は、距離センサ11の検出領域を複数の小領域に分割し、距離センサ11により検出された物体の距離情報と、地図情報とに基づいて、小領域毎に自己位置を判定する小領域判定手段と、小領域判定手段により判定された小領域毎の自己位置の判定に基づいて、自己位置が正常であるか否かを最終的に判定する自己位置判定手段と、を備えている。
(もっと読む)
レーダ装置、信号処理装置
【課題】
指向角度を間引いてレーダ信号を送出しても物標の角度検出精度の低下を防止する。
【解決手段】
アンテナが第1の方向に回動するときには、前記アンテナにより間欠的な第1の指向角度群でレーダ信号を送受信し、前記送受信されたレーダ信号の周波数差を有する第1のビート信号群を生成し、前記第1の方向と反対の第2の方向に回動するときには、前記アンテナにより前記第1の指向角度群とは異なる間欠的な第2の指向角度群でレーダ信号を送受信し、前記送受信されたレーダ信号の周波数差を有する第2のビート信号群を生成する。そして、前記第1のビート信号群の第1のピークと、前記第2のビート信号群の第2のピークとを検出し、前記第1のピーク形状における極大値と前記第2のピーク形状における極大値とに基づき、物標の角度を検出するので、物標の角度検出精度の低下を防止することができる。
(もっと読む)
レーダ装置
【課題】高精度に目標を観測できるレーダ装置を提供する。
【解決手段】第1送受信兼用素子と第2送受信兼用素子とに分割された送受信兼用素子11aと、第1受信専用素子と第2受信専用素子に分割された受信専用素子12aを備えたアンテナ10と、観測角度範囲を複数に分割して、アンテナの各素子により、分割した角度範囲の各々を覆うように送信ビームを形成し、受信は、アンテナの各素子のビーム指向方向を第1送受信兼用素子と第2送受信兼用素子と同じ方向にして、第1送受信兼用素子と第1受信専用素子、第2送受信兼用素子と第2受信兼用素子により、ΣとΔの位相モノパルスビームを形成して複数の角度範囲の各々を覆い、第1送受信兼用素子、第2送受信兼用素子、第1受信専用素子および第2受信専用素子により、狭ビーム幅のビームを形成するビーム成形部34と、ビーム成形部で形成されたビームに基づきモノパルス測角を行う測角部37を備える。
(もっと読む)
目標追跡装置及び目標追跡方法
【課題】低SNR環境下においても目標を高精度に検出・追跡できるようにする。
【解決手段】目標追跡装置は、TBD(Track Before Detect)アルゴリズムを用いて受信信号から目標を検出する第1検出処理器6と、その検出結果をもとに目標を追跡する第1追跡処理器とを備える第1信号処理部4と、第1検出処理器6より高レートで受信信号から目標を検出する第2検出処理器10と、その検出結果をもとに目標を追跡する第2追跡処理器11とを備える第2信号処理部8と、第1検出処理器6で目標が検出されなかった場合は第1信号処理部4のみを実行させ、第1検出処理器6で目標が検出され、かつ第2検出処理器10で目標が検出されなかった場合は、第1信号処理部4と第2信号処理部8とを併用させ、第2検出処理10で目標が検出された場合は第2信号処理部8のみを実行させるように、受信信号の処理系統を判定する処理判定器3とを具備する。
(もっと読む)
レーダ装置空中線
【課題】機能用途の異なるレーダ装置で用いる空中線を共通化したレーダ装置空中線を得る。
【解決手段】 複数の移相器が直線状に配列された一次元フェイズドアレー空中線を構成し、レーダ装置本体からの制御信号に基づき、この一次元フェイズドアレー空中線を回動させてアレーの配列方向を仰角方向または方位方向に保持する機構を備えるとともに、配列の方向には高速での走査が可能な電子走査によるビーム走査を行いつつ、方位方向には機械走査または対象方位への駆動・停止を可能にすることによって、レーダ装置本体の備える機能に応じて、方位方向、及び仰角方向の走査モードを種々に組み合わせる。
(もっと読む)
干渉防止レーダ装置
【課題】電波を送信する他の装置との電波干渉をより確実に防止することのできる干渉防止レーダ装置を提供する。
【解決手段】ミリ波を発信して当該ミリ波に対する反射波を受信するレーダセンサ1を有し、受信された当該反射波により周囲環境を検出する干渉防止レーダ装置10であって、ミリ波を発信する他のレーダ装置と同期してレーダセンサ1によりミリ波を発信するために用いられる時刻同期信号を受信する同期信号取得部42と、同期信号取得部42により受信された時刻同期信号に対応する方角に向けてミリ波が発信されるように、レーダセンサ1を制御する時分割駆動制御部41と、を備える。この干渉防止レーダ装置10により、ミリ波を送信する他の装置との電波干渉をより確実に防止することができる。
(もっと読む)
1 - 20 / 246
[ Back to top ]